はじめに
ROSには,rosserial_arduinoというArduinoとシリアル通信をするためのパッケージが用意されている.
これを用いArduinoとROSを接続,ROS経由でArduinoを使用し,キーボード操作でサーボモータを動かそうと試みる.
環境
| OS | Ubuntu14.04 |
| ROS | indigo |
| ArduinoIDE | 1.8.5 |
| Arduino | Arduino UNO |
インストール
まずはROSにrosserialのパッケージをインストール.
バージョンindigoの場合
$ sudo apt-get install ros-indigo-rosserial-arduino
$ sudo apt-get install ros-indigo-rosserial
ArduinoIDEをインストールしていない場合は,これもインストールする.
下記サイトにてダウンロードして解凍する.
https://www.arduino.cc/en/main/software
任意のディレクトリ上で解凍
$ sudo tar Jxfv arduino-1.8.5-linux64.tar.xz
インストールしたIDEにros_libを追加する.
$ cd arduino-1.8.5/libraries/
$ rosrun rosserial_arduino make_libraries.py ./
デバイスファイルに権限を付与する
PCとArduinoをUSBで接続すると,/dev/ttyACM*が生成される.
しかし,のままではArduinoにコードの書き込みができないので,書き込み権限をつける.
ttyACM0の場合
sudo chmod 0666 /dev/ttyACM0
ノードの構成
今回は以下のようなノードの構成になる.

-
keyboard_driverノードにてキーボード入力を受け取り,/Keysトピックにキー入力を配信する. -
keys_to_servoノードにて特定のキーの場合,サーボの設定角度を/servoトピックに配信する. -
serial_nodeノードにてサーボの設定角度をシリアル通信でArduinoへ転送する.
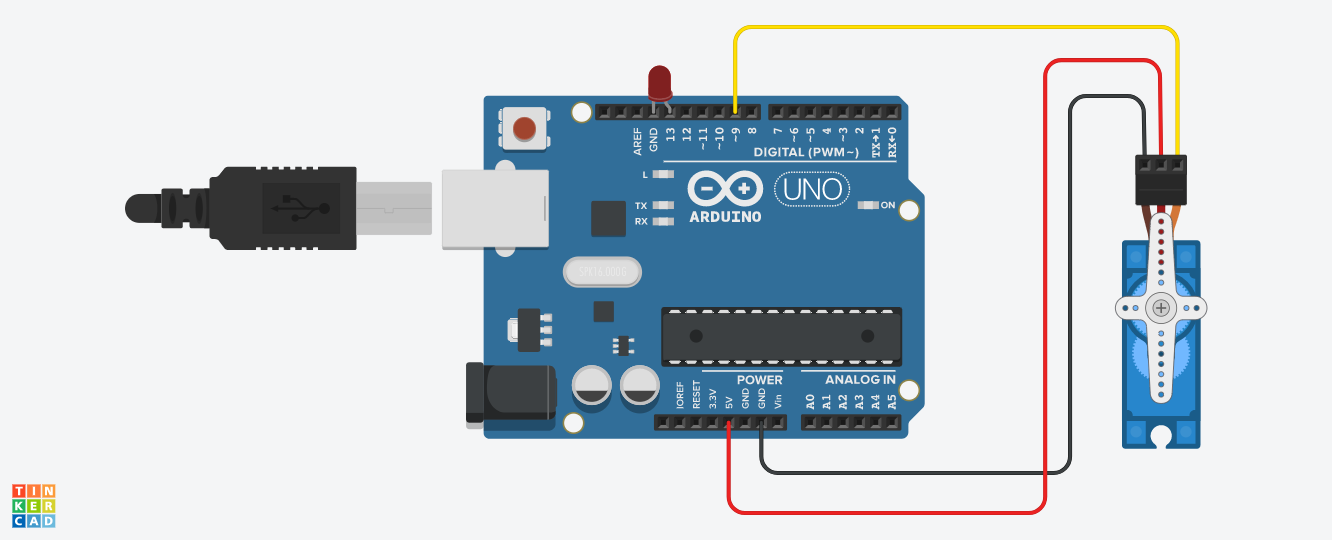
回路
サーボを動かすだけなので回路構成は単純.TinkerCADを使用して簡単な図を示した.
使用コード
ArduinoにはIDEを使用して以下のコードを書き込む.
servo_test.ino
# if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
# else
#include <WProgram.h>
# endif
# include <Servo.h>
# include <ros.h>
# include <std_msgs/UInt16.h>
ros::NodeHandle nh;
Servo servo;
void servo_cb(const std_msgs::UInt16& cmd_msg){
servo.write(cmd_msg.data);
digitalWrite(13, HIGH-digitalRead(13));
}
ros::Subscriber<std_msgs::UInt16> sub("servo", servo_cb);
void setup(){
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
servo.attach(9);
}
void loop(){
nh.spinOnce();
delay(1);
}
keyboard_driverノードとkeys_to_servoノードは以下のコードを使う.
keyboard_driver.py
# !/usr/bin/env python
import sys, select, tty, termios
import rospy
from std_msgs.msg import String
if __name__ == '__main__':
#KeysトピックにString型のメッセージを毎秒一回送る
key_pub = rospy.Publisher('keys', String, queue_size=1)
#keyboard_driverノード作成
rospy.init_node("keyboard_driver")
rate = rospy.Rate(100)
old_attr = termios.tcgetattr(sys.stdin)
tty.setcbreak(sys.stdin.fileno())
print "Publishing [z], [x] or [a]. Press Ctrl-C to exit..."
while not rospy.is_shutdown():
if select.select([sys.stdin], [], [], 0)[0] == [sys.stdin]:
key_pub.publish(sys.stdin.read(1))
rate.sleep()
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, old_attr)
keys_to_servo.py
# !/usr/bin/env python
import rospy
from std_msgs.msg import String
from std_msgs.msg import UInt16
key_mapping = { 'z': 0, 'x': 90, 'a': 180 }
def keys_cb(msg, twist_pub):
if len(msg.data) == 0 or not key_mapping.has_key(msg.data):
return # unknown key.
vels = key_mapping[msg.data]
t = UInt16()
t = vels
publisher.publish(t)
if __name__ == '__main__':
#keys_to_servoノード作成
rospy.init_node('keys_to_servo')
#servoトピックにUInt16型のメッセージを送る
publisher = rospy.Publisher('servo', UInt16, queue_size=1)
rospy.Subscriber('keys', String, keys_cb, publisher)
rospy.spin()
実行
roscore,rosrunを個別のターミナルで実行.
ttyACM0の場合
$ roscore
$ rosrun rosserial_python serial_node.py /dev/ttyACM0
$ rosrun keyboard_driver keyboard_driver.py
$ rosrun keys_to_servo keys_to_servo.py
参考記事
ROSのrosserialを使ってArduinoでLチカをする
https://qiita.com/nnn112358/items/059487952eb3f9a5489b
ROS.org Servo Controller Example
http://wiki.ros.org/rosserial_arduino/Tutorials/Servo%20Controller