はじめに
こんにちは,じゃにです.
今回は前回のPCBA発注に続き,JLCPCBでPCBAを発注したのでその基板についての記事です.
※この記事はJLCPCBの提供でお送りします.
WARNING
記事内の回路構成や、コードを用いて発生した損害について、筆者は一切の責任を負いません.
JLCPCBについて

JLCPCBは、中国に本社がある基板製造の会社です.
すでに多くの人が知っているかもしれませんが、100mm×100mm以下の2層基板であれば、2ドルで製造していただけるなどとても安く高品質な基板を手に入れることができます.
基板以外にも、JLC3DP,JLCCNC(CNC加工、板金加工)などの機械加工サービスも提供されています.
私も高専時代から基板を何度も発注してきましたが、前回初めてPCBAを発注しました.
↓前回の記事
今回発注した基板
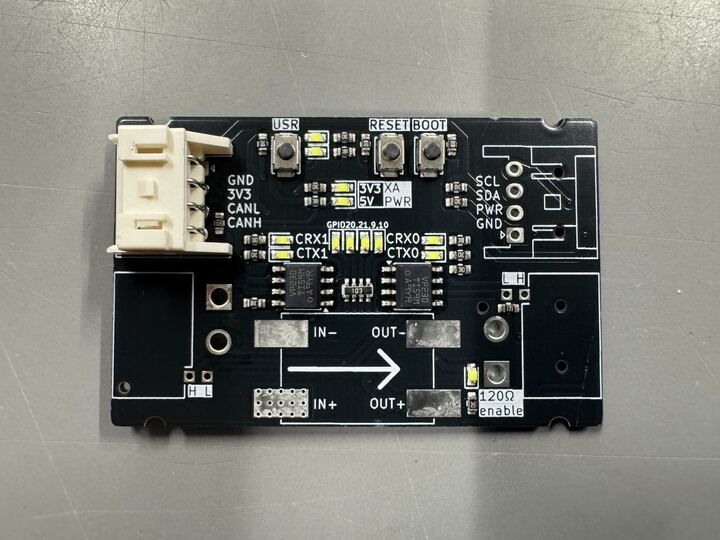
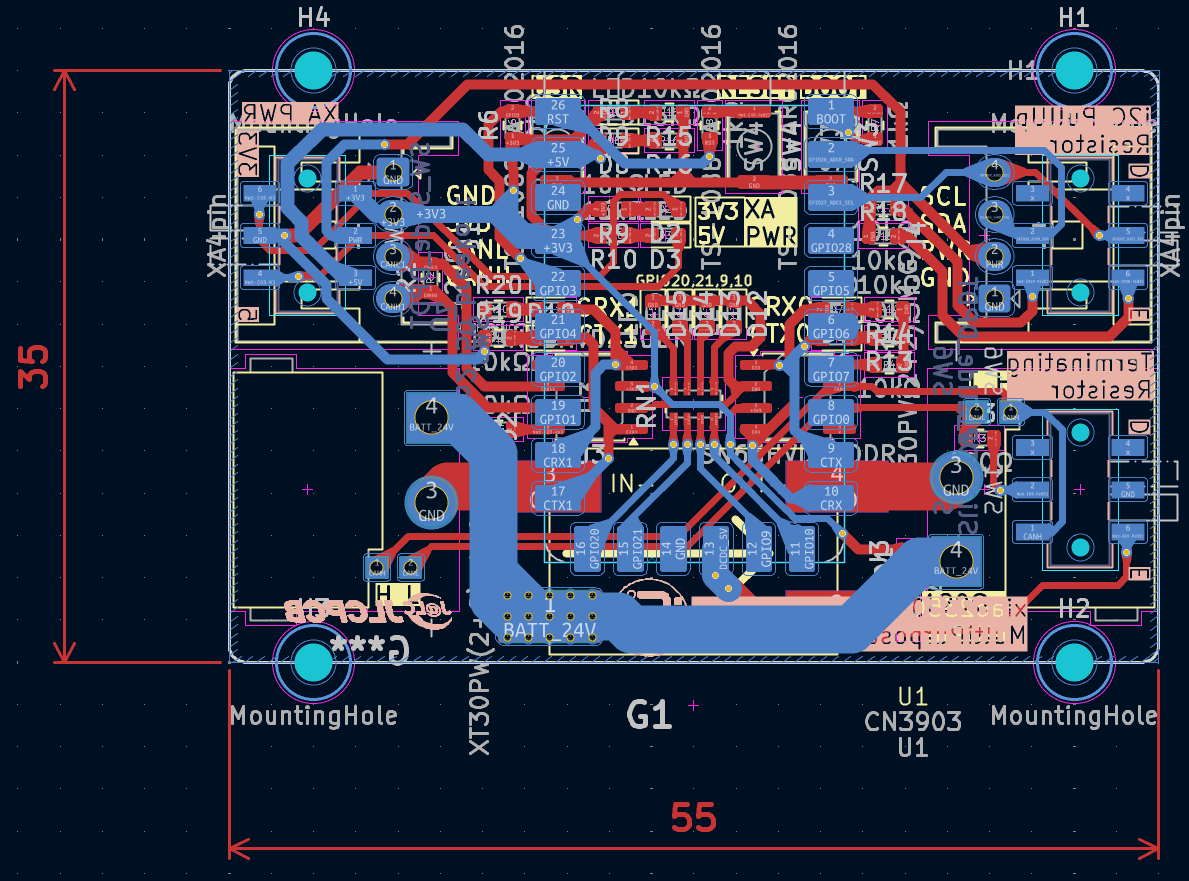
①RP2350多目的基板ver1.1.0
【表面】
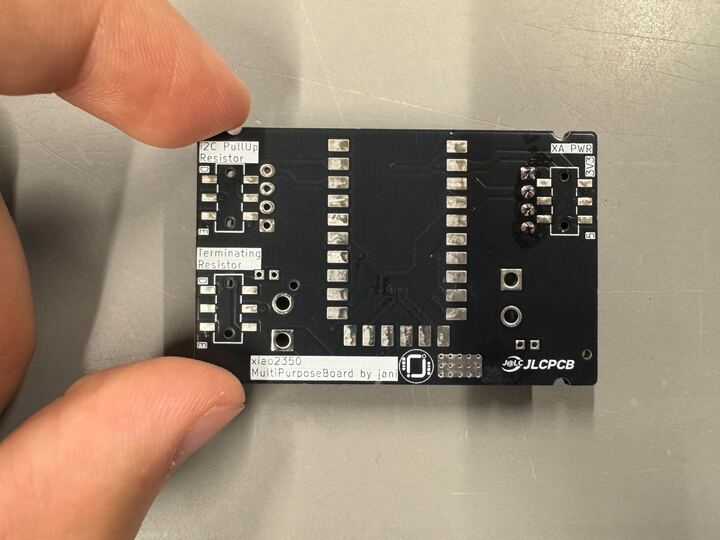
【裏面】
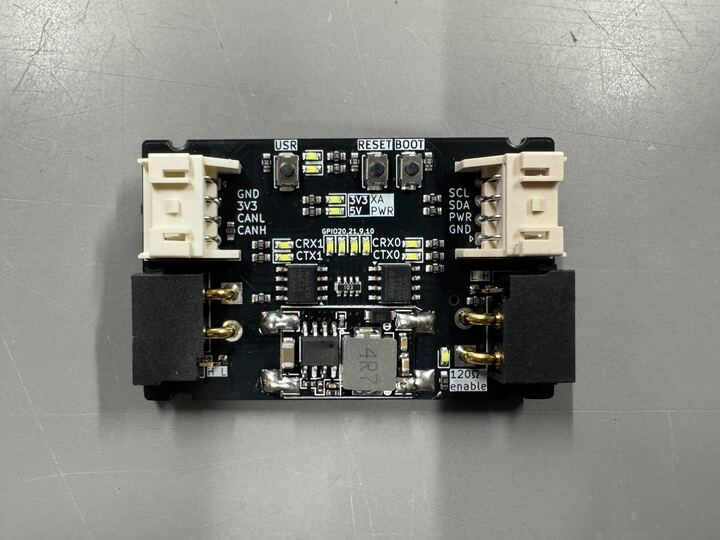
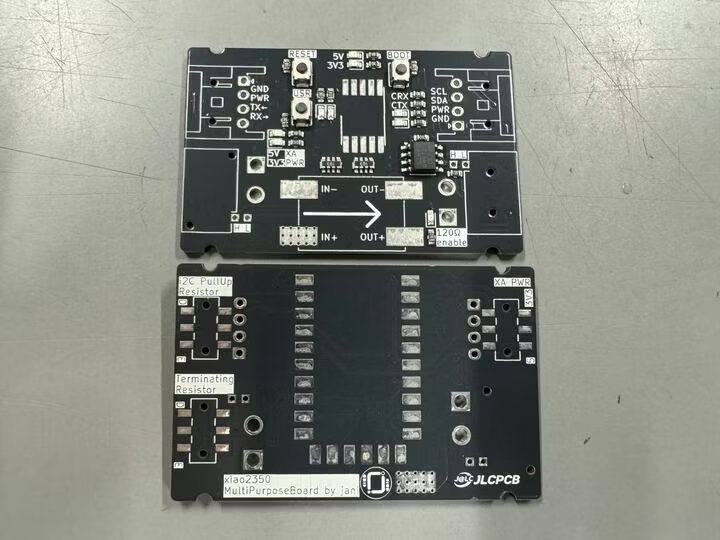
【実装後表面】
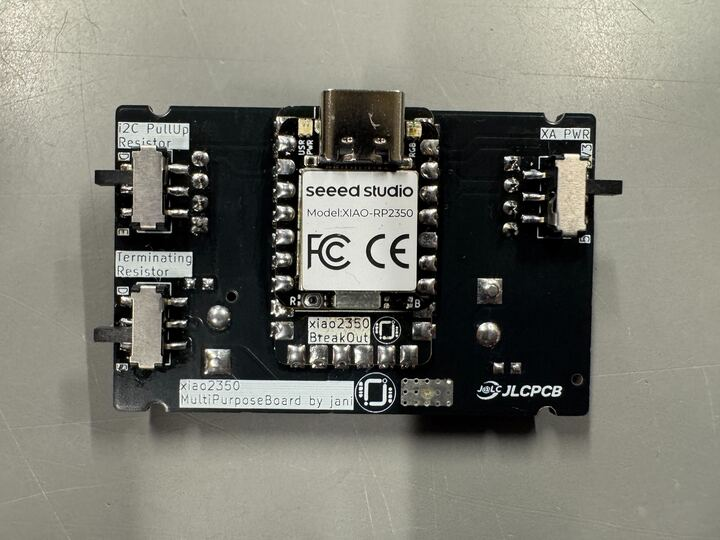
【実装後裏面】
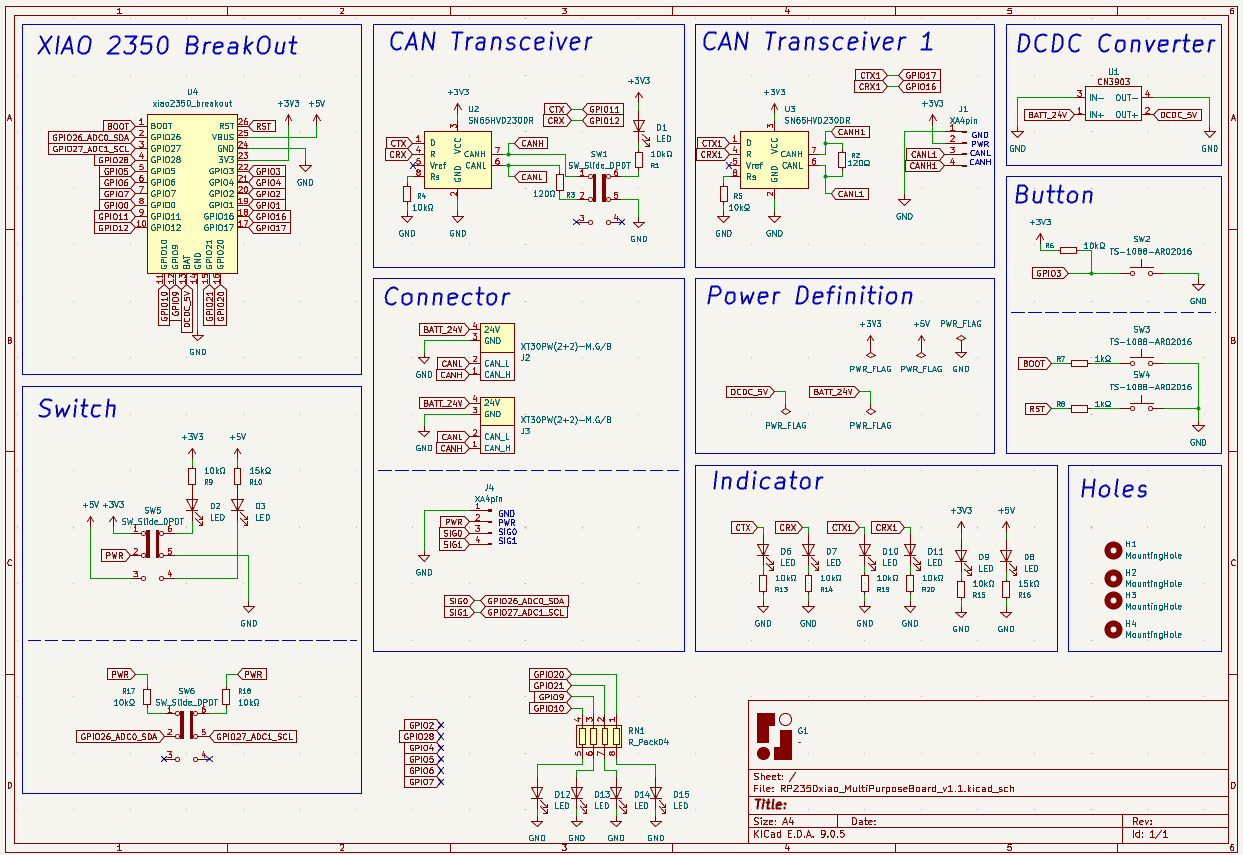
【回路図】
使用しているマイコンボードはこちら↓
機能と前回からの変更
- CANバス ×1 -> CANバス ×2
- ユーザーLED ×2 -> LED ×4
- ユーザーボタン ×1
7セグメントLED- DCDCコンバータにより駆動電源から制御電源供給
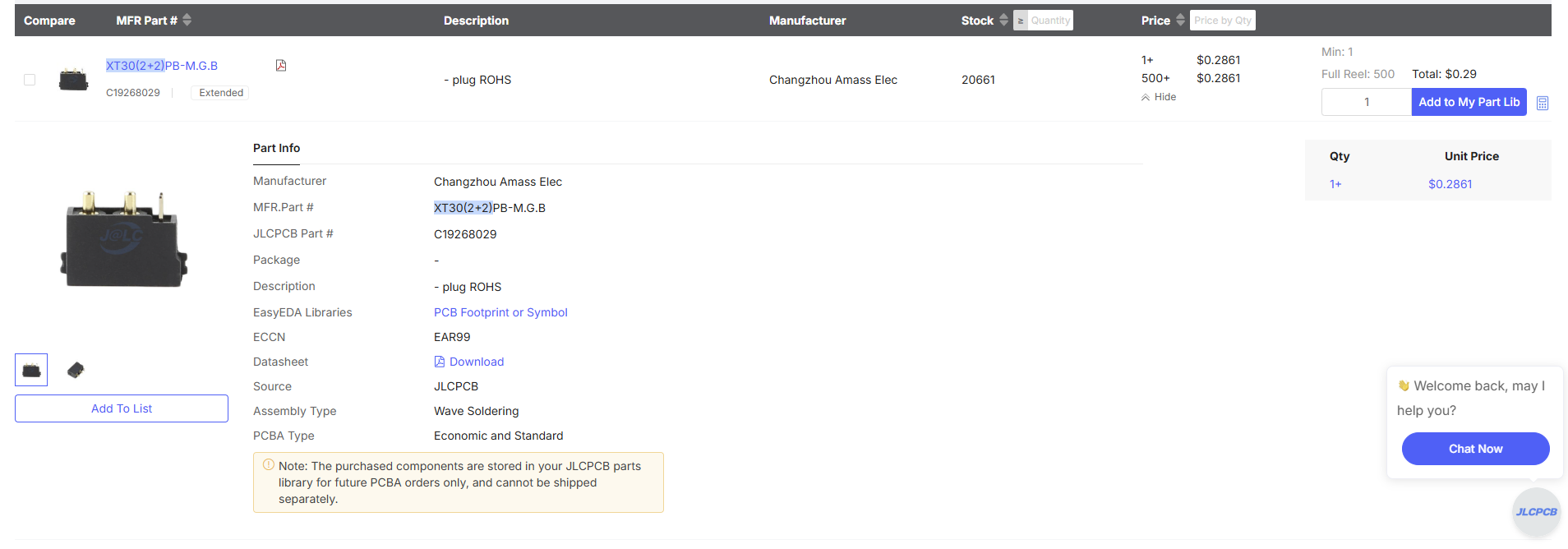
- XT30(2+2)によるデイジーチェーン接続
- UART,i2C 各1系統 -> i2c 1系統
- i2cプルアップ有効 / 無効切り替えスイッチ
- CAN通信終端抵抗有効 / 無効切り替えスイッチ
- 通信用XAコネクタ電源の3.3V / 5V切り替えスイッチ
基本的な機能は前回の基板と同様ですが,UARTの機能がなくなった代わりにCANバスを1系統増やしました.
今回の基板を子基板としてメインの基板からCANで通信しつつ,子基板からCAN経由のモータを回したいなと思ったため仕様を変更しました.
また,前回の基板ではコネクタは自分で実装しましたが,今回は片方のXAコネクタを実装してもらいました.
両方のXAコネクタとXT30PW(2+2)コネクタも実装してもらいたかったのですが,ツメなしXA4ピンコネクタの在庫が足りなかったため片方のみと,XT30PW(2+2)はそもそも在庫がなかったので,片方のXA4ピンコネクタのみ実装してもらいました.
【(参考)前回発注した基板】
部品の在庫などはここで確認できます↓
PCBAの詳しい発注は,私の前回の記事や以下の記事が参考になると思います↓
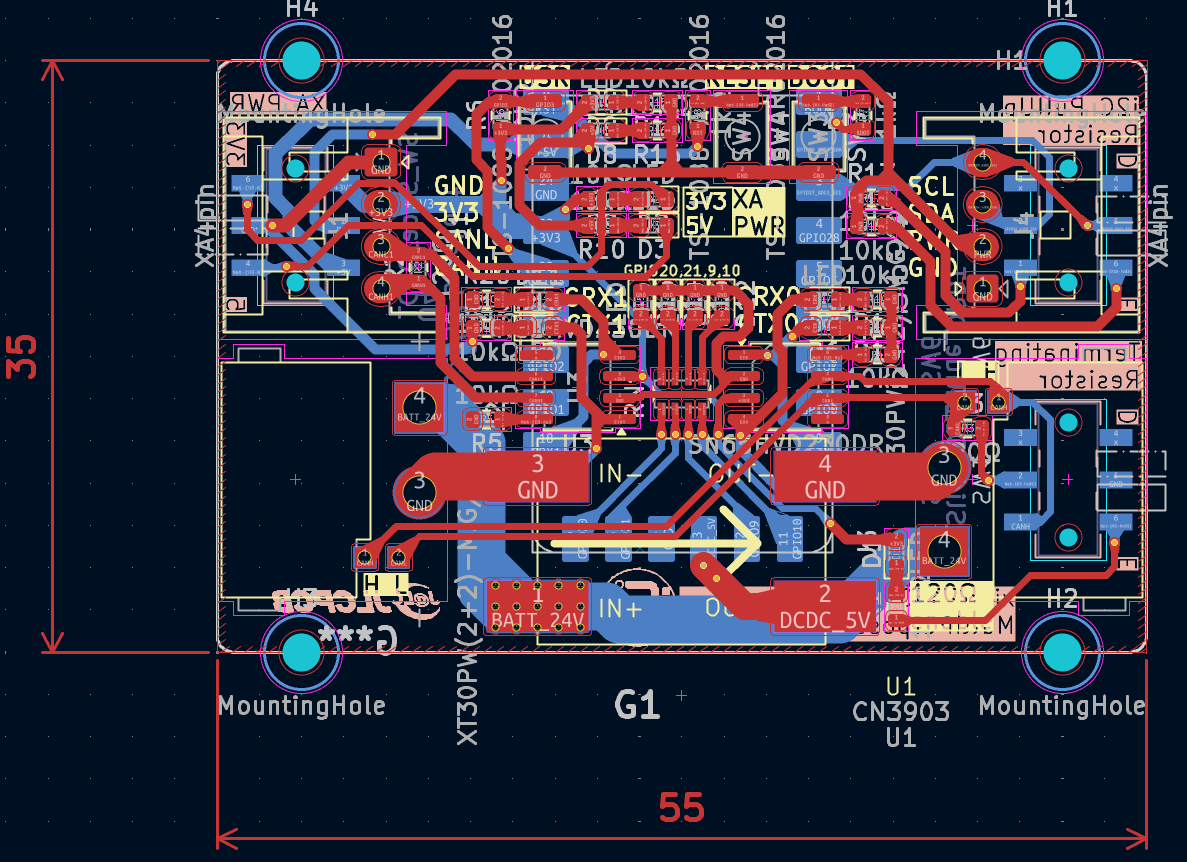
【基板図表面】
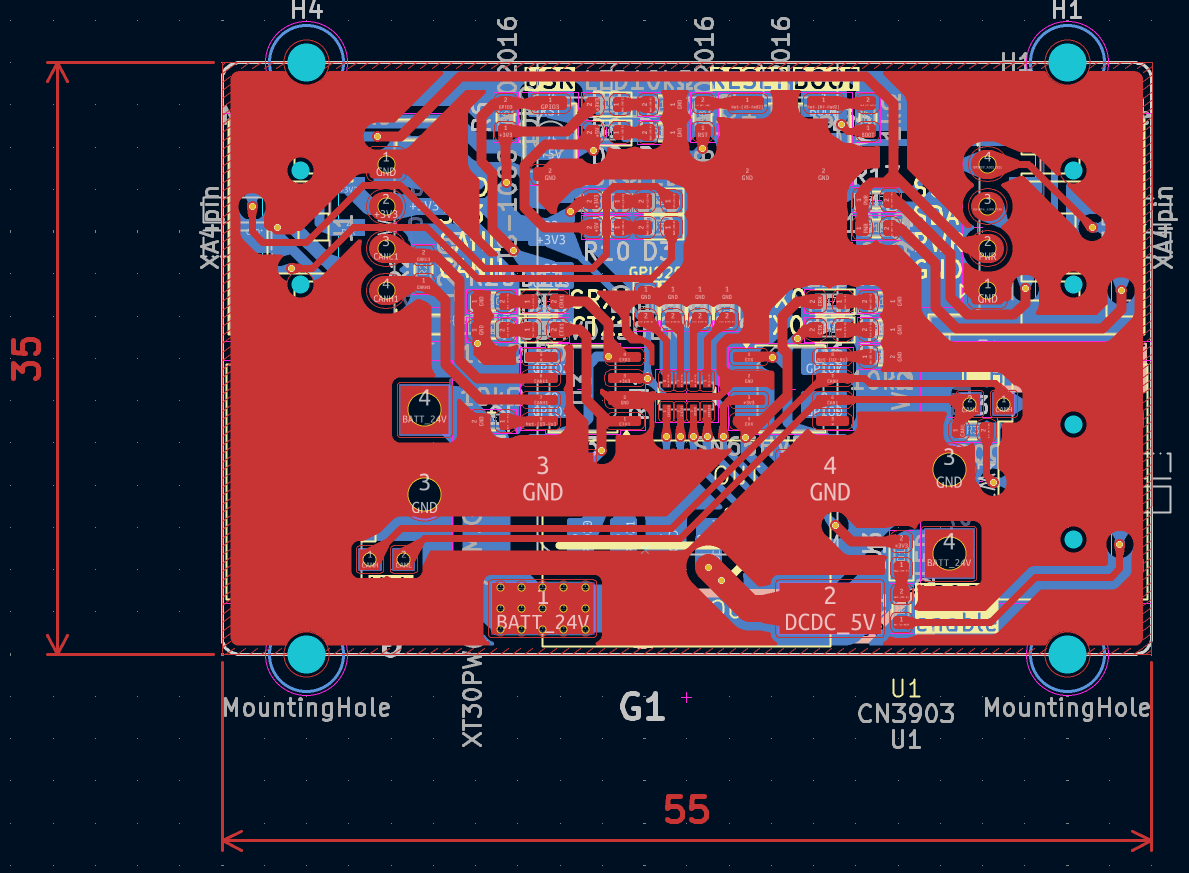
【基板図裏面】
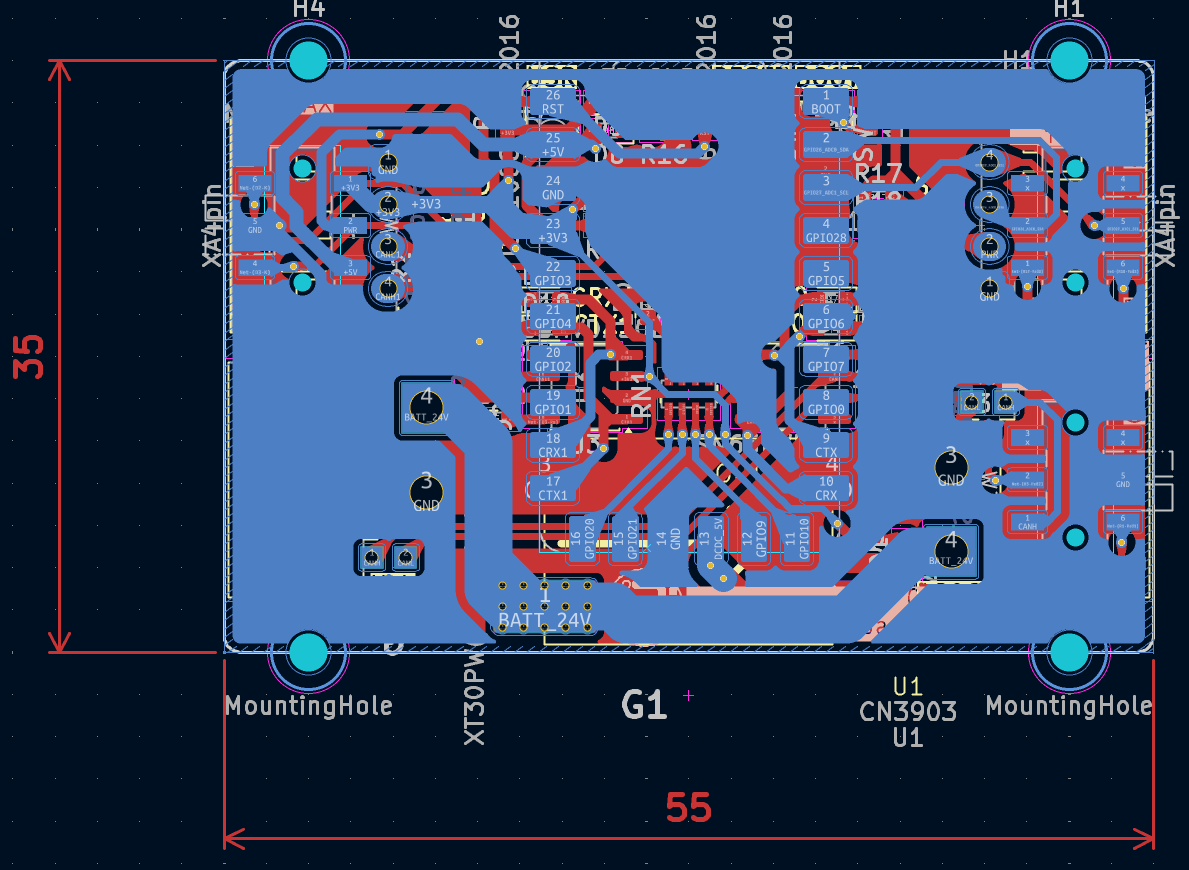
前回は設計ミスでベタグラウンドの島ができてしまっていてGNDのジャンパが必要な箇所もありましたが,今回は発注前に再確認したことで回避できました.
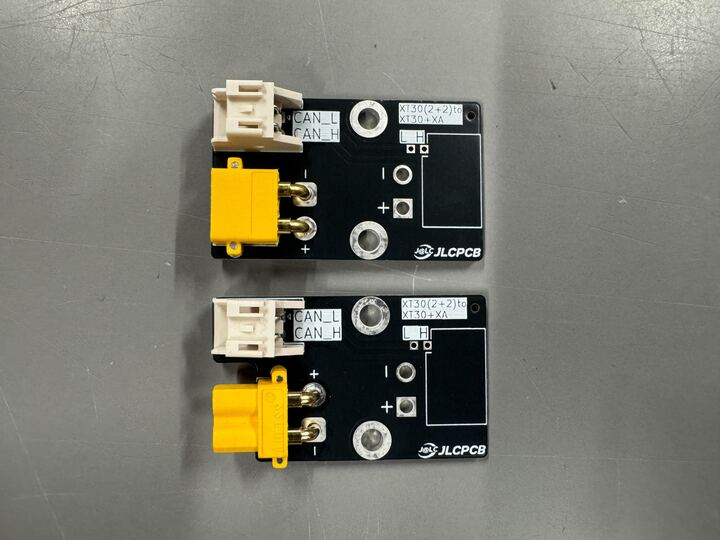
②XT30PW(2+2) to XT30 + XA基板(2種類)
【表面】
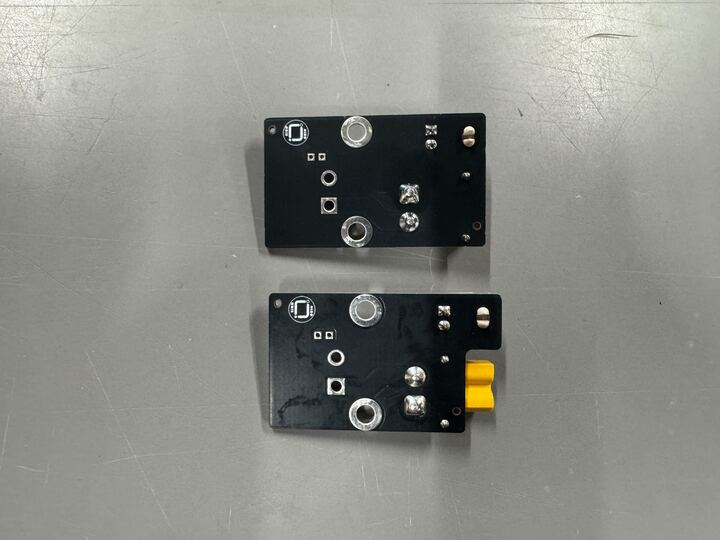
【裏面】
【実装後】

機能と説明
回路図を載せる必要もないくらいシンプルな変換基板です.
XT30PW(2+2)から,電源をXT30,信号線をXA2ピンコネクタで取り出すための基板です.PwrCANケーブルが手元にたくさんあるわけでもなく,試験する際などに従来から使っていたXT30やXAコネクタのケーブルが使用できるので地味に便利な変換基板だなと思っています.
ちなみに私が使用しているPwrCANケーブルは以下のものです.10cmのものが10本で2500円程度するのでそんなに数をそろえることができず,変換基板を作って既存のケーブルを使用できるようにできたのが便利です.
XT30メスがついている方の基板は,以下のように基板外径を四角じゃなくすることで抜き差しの際にケーブル部分でなくコネクタを持てるようにしました.
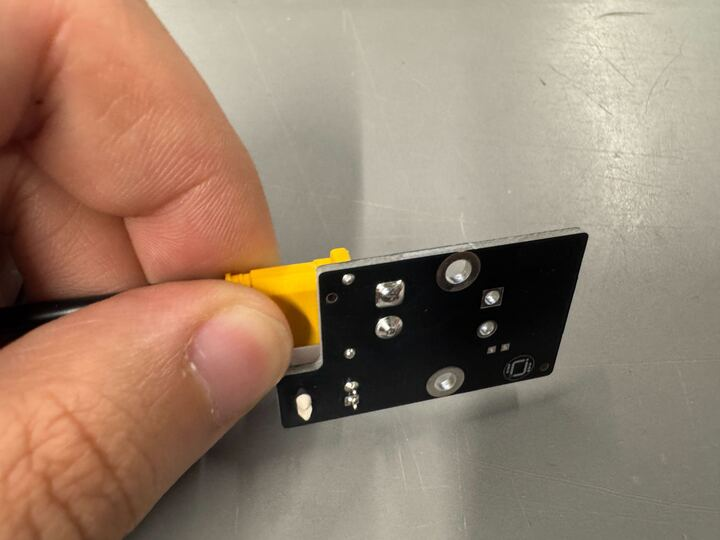
③XT30(2+2)ハブ基板
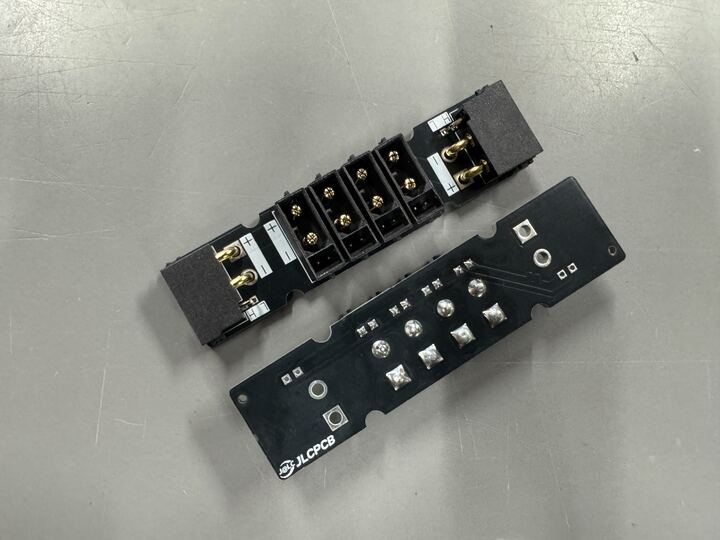
機能と説明
この基板も回路図を載せる必要がないくらいシンプルな基板です.
水平型のXT30PW(2+2)から垂直型のXT30PB(2+2)に分配しています.
垂直型のXT30PB(2+2)はPCBAで実装していただきました!
スルーホールのコネクタで,自分で実装する難易度も高くない部品ですが,部品を発注して手元に基板が来てから実装するよりも基板が届いた時点でコネクタが実装されている方がはるかに楽です!
JLCPCBのPCBAでは,このコネクタやXAコネクタのようなスルーホールのコネクタもPCBAで実装してもらえるのが本当に助かります!
今回は単純にXT30PW(2+2)からXt30PB(2+2)に分配する基板としましたが流れる電流などを考えたら,基板の入出力はXT60+XAとするのが無難な気がします.この基板はまた次回の発注で作ろうかなと考えています.
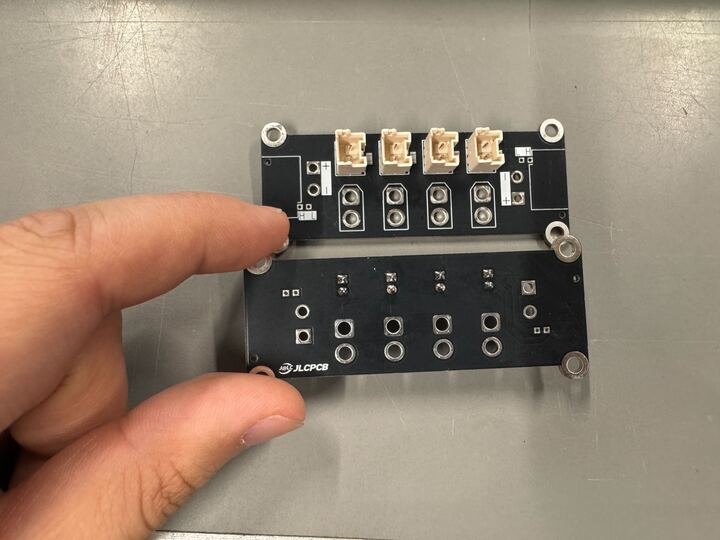
④XT30PW(2+2) to XA+XT30ハブ基板
【実装後(使用中)】

機能と説明
この基板はXT30PW(2+2)コネクタで入出力を行い,XT30とXA2ピンコネクタに分配するハブ基板です.②のXT30PW(2+2)変換基板のハブ版のような基板です.
使用中の画像は,今趣味で作っているロボットの足回りのモータを集約している様子です.使用しているモータはDAMIAOのDM2325で,CANでESCと通信するため今回の基板で分配するのにちょうどいいです.
DM2325については以下の記事で解説しています.
今回の基板は4ポートですが,製作中のロボットにはDAMIAOのIMUも搭載しており,そのIMUもCANで通信できるため5ポートにしておけばよかったなとも思います.(4の方がバランスいいのは間違いない)
DAMIAOのIMUについては研究室の先輩の以下の記事で紹介されています.
まとめ
今回は変換やハブ基板ばかりの発注でした.
手元に到着した時に今までの青い封筒や段ボールとは違い見たことない大きいサイズの段ボールに入っていました.

今回初めてスルーホールのコネクタをPCBAで実装してもらいましたが,しっかり実装されており満足の品質でした!
また,表面実装部品もとてもきれいに実装されており,JLCPCBのPCBAにはいつも助けられています.
基板が到着した後に実装する部品が少ないと,それだけ早く基板のテストを行うことができるため,今後も積極的にJPCPCBのPCBAを利用していこうと思います!