モジュールEPOS4は、USBケーブルをつないで無償で利用できるEPOS studioを使って、たくさんあるパラメタを調整します。ダウンロードしたのは、「EPOS Studioとファームウェア EPOS Studio 3.7 (Ver.35)」です。
TwinCATをOpからInitに変更します。

EPOS studioを起動
古い解説しかないようです。
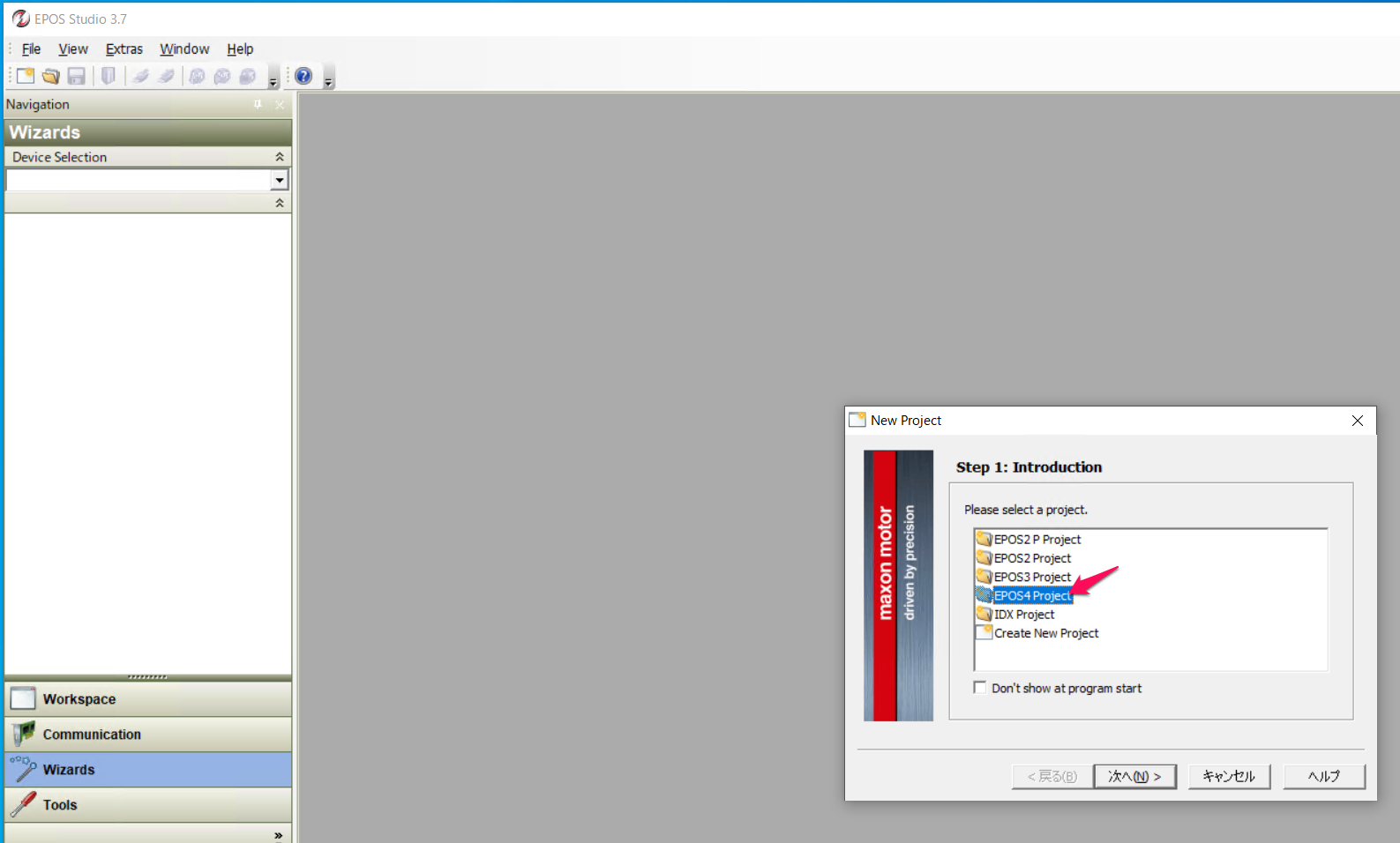
EPOS studioを起動して、EPOS4 Projectを選択します。
WizardsのStartupをクリックします。最初はMotorのパラメタです。EC-i 40の仕様を見ながら記入します。

Nominal currentはコントローラの1000mAを記入しました。
次のGearはないので、何もしません。
Sensorは、X4のホール・センサと、X5のエンコーダで、1回転1024パルスの分解能を記入しました。

Commutationは、正弦波駆動です。センサは、上記の選択内容です。

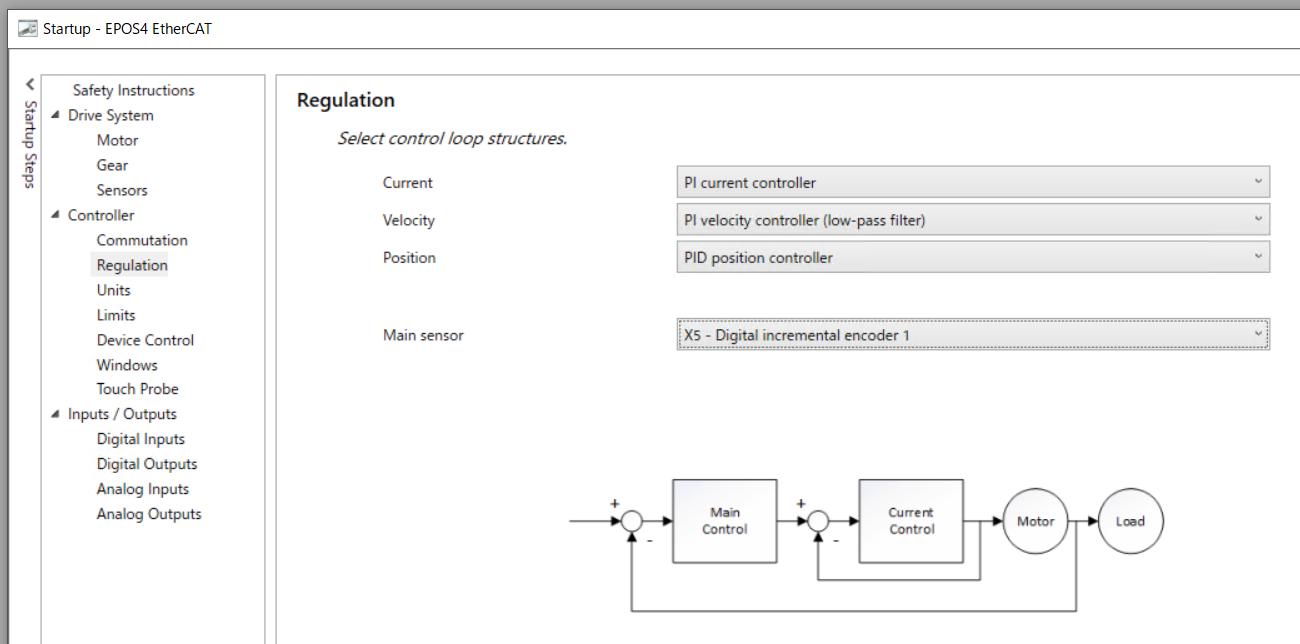
Regulationは、デフォルトのまま、図のように選択しました。
Unitsは、何もしません。
Limitsは、次のように記入しました。max profile velocityは不明だったので、モータの負荷時の最高速度を入れました。

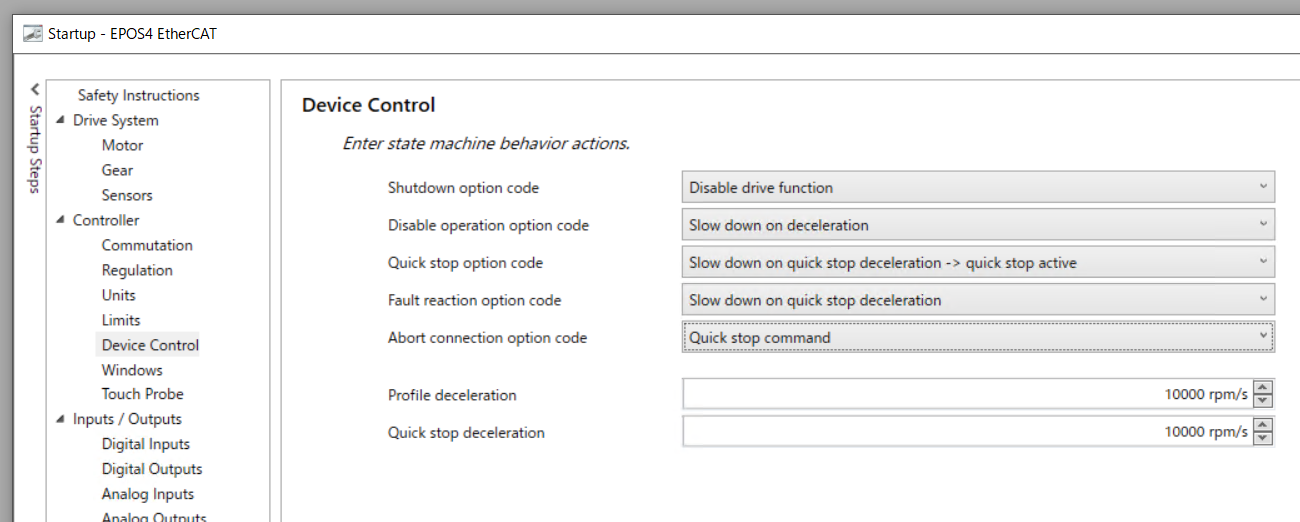
Device Controlもデフォルトのままだと思います。
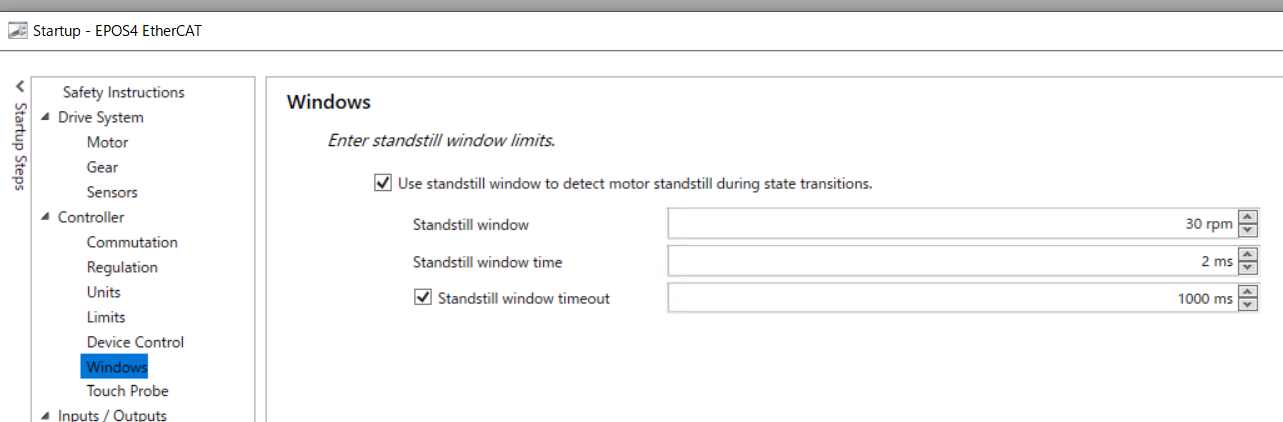
Windowsもデフォルトのままだと思います。
Touch Probeは用意していないので、何も変更しません。
Inputs/Outputsの各項目は、いろいろデフォルトで入っていましたが、ぜんぶNoneにしました。
自動チューンナップ
StartupをFinishで終了します。
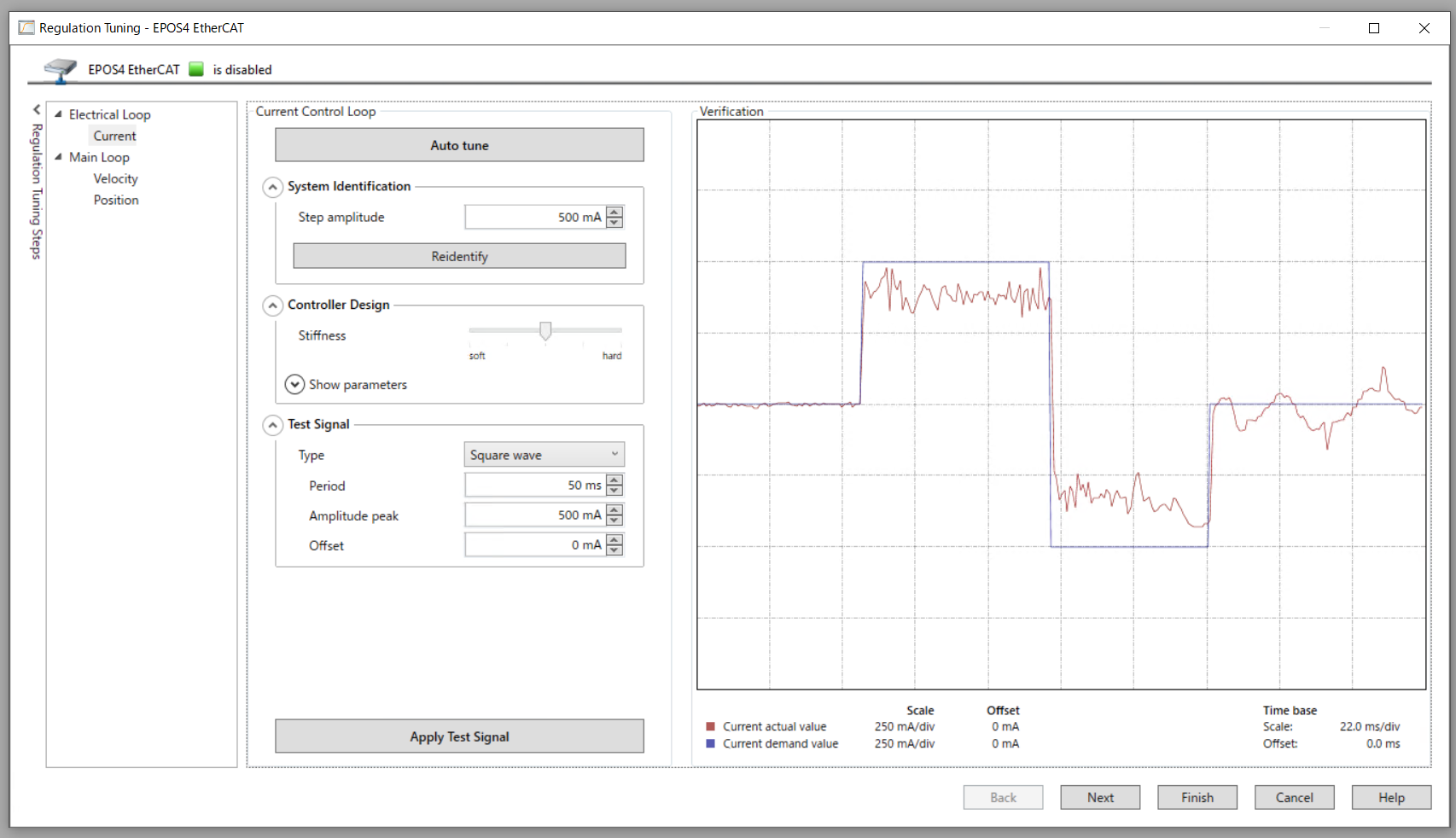
左のNavigation窓から、Regulation Tuningを選びます。
Currentを選び、Auto tuneボタンを押します。動作後の画面です。
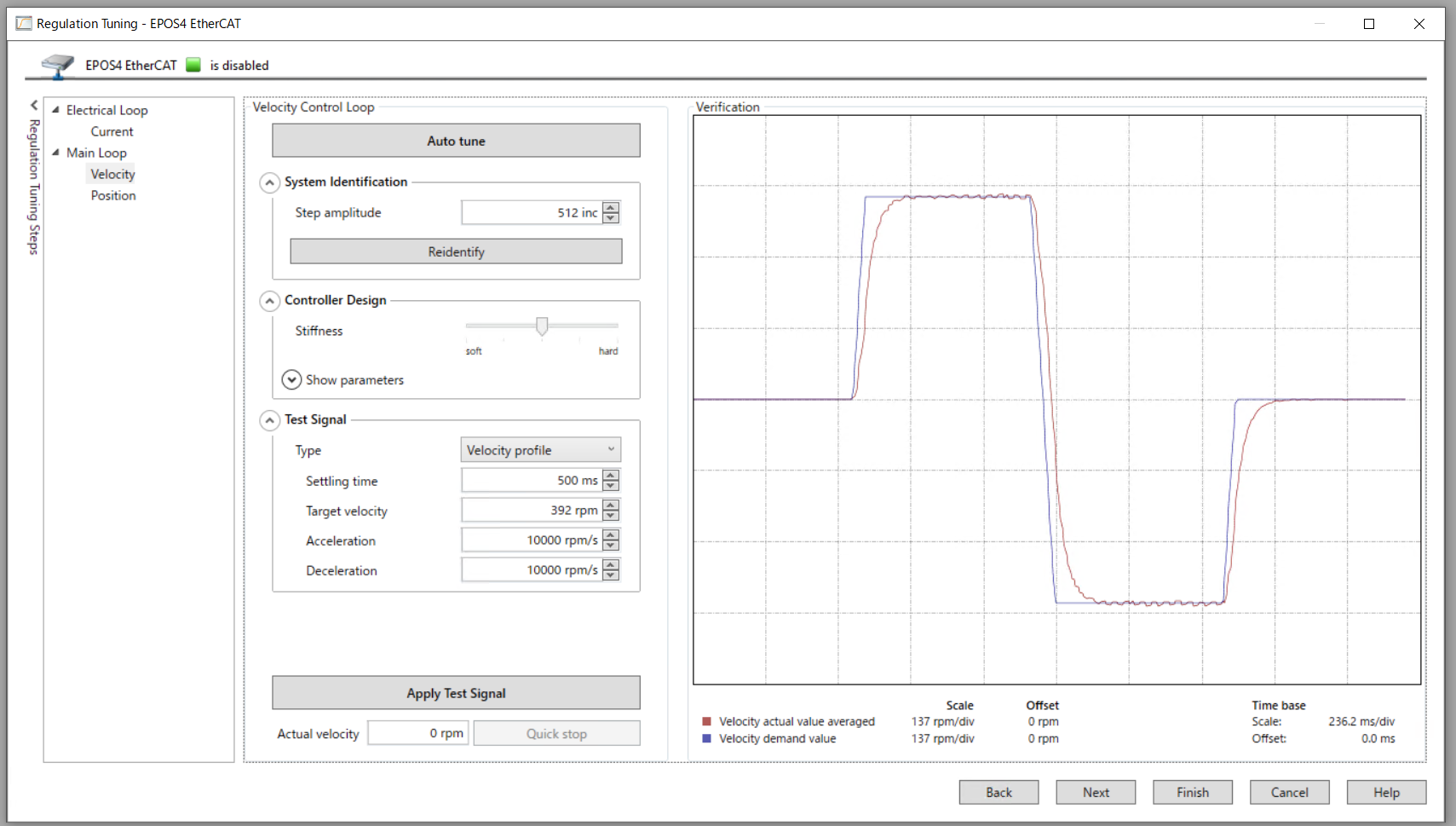
Nextを押すとVelocityの項目に移動します。Auto tuneボタンを押します。動作後の画面です。そこそこの時間がかかりました。
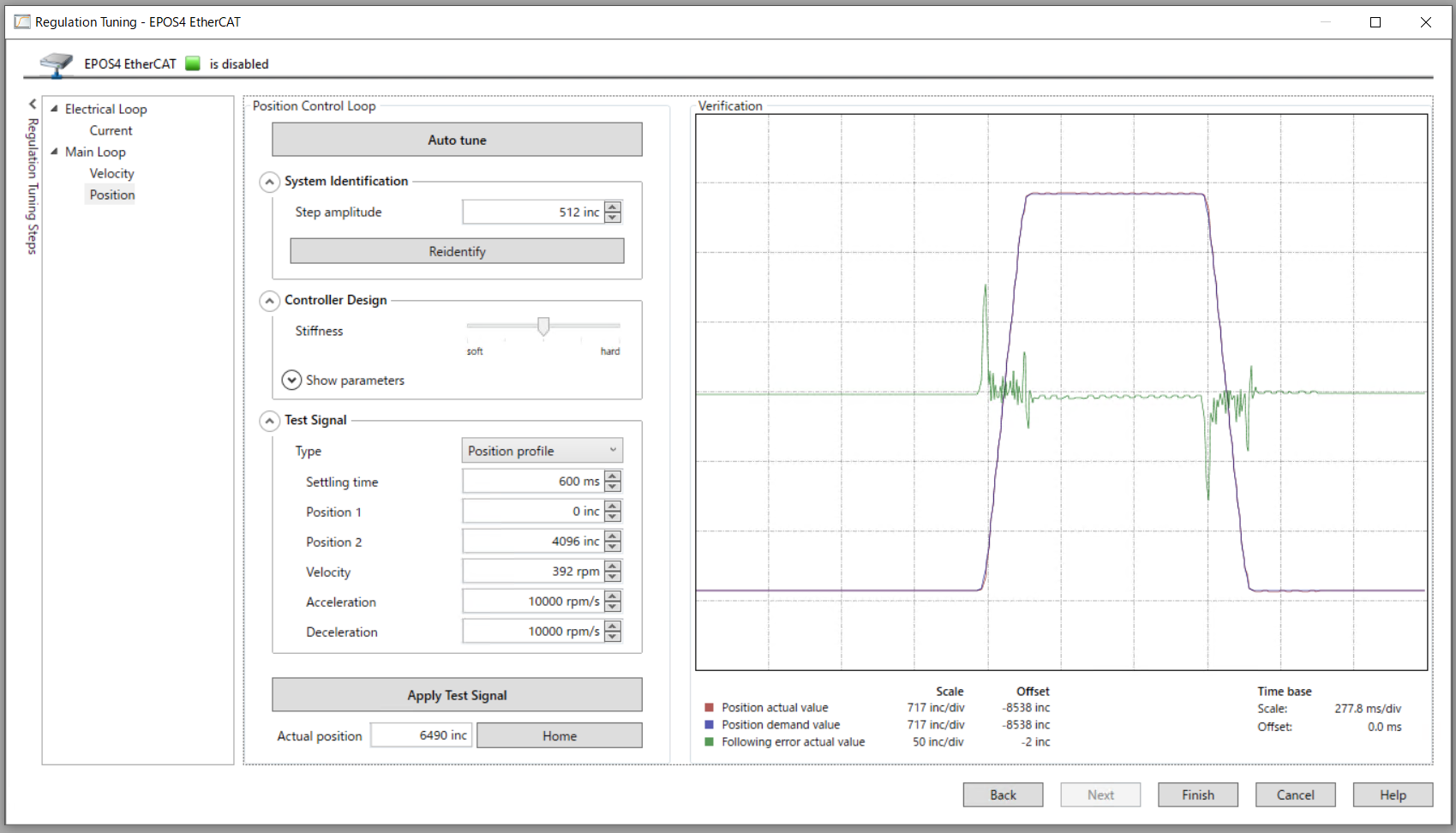
Nextを押すとPositionの項目に移動します。Auto tuneボタンを押します。動作後の画面です。
モータは回転するので、じゃまにならないように、周辺をあけておきます。

動作確認
上記のツールをFinishします。
左の窓のToolsをクリックします。Profile Position Modeを選択します。
右のエリアに設定項目が表示されます。最初にActivate Profile Position Modeをクリックすると、Inputなどのパラメタの項目が入力できるようになります。
Inputs Terget Positionを500incにします。下にあるControlのEnableをクリックし、Move to targetを何回か押すと、動作を繰り返します。動作中は、右のOutputsの各値が変化します。

ここで、言葉の意味や、パラメタの修正で何が変わるなどの学習ができるはずですが、先を急ぎます。