CircuitPython 8.0.0-beta.6を使って、マイコン・ボードFeather nRF52840 Expressにつないだジョイスティックからアナログ値を読み出し、角度情報をBLEで送信するプログラムを作ります。
次回、BLEのセントラルを作り、最終的には、モータを回す予定です。
Feather nRF52840 Express
おもなスペック

Adafruitのマイコン・ボードです。BLEモジュールの表面には技適のコードが刻印されています。
スイッチサイエンス Adafruit Feather nRF52840 Express、秋月電子通商 Adafruit Feather nRF52840 Expressで購入できます。
ピン配置です。

- CPU ARM Cortex M4F(64MHz)
- メモリ フラッシュ1MB、SRAM 256KB
- 動作電圧 1.7~3.3V
- Bluetooth Low Energy compatible 2.4GHz
- デバッグ用SWDコネクタ
- 3.7 Vリチウム・ポリマ電池用のコネクタと充電器
CircuitPython 8.0.0-beta.6
インストール
https://circuitpython.org/ から入ります。Downloadsをクリックします。
検索欄にFeatherを入れます。
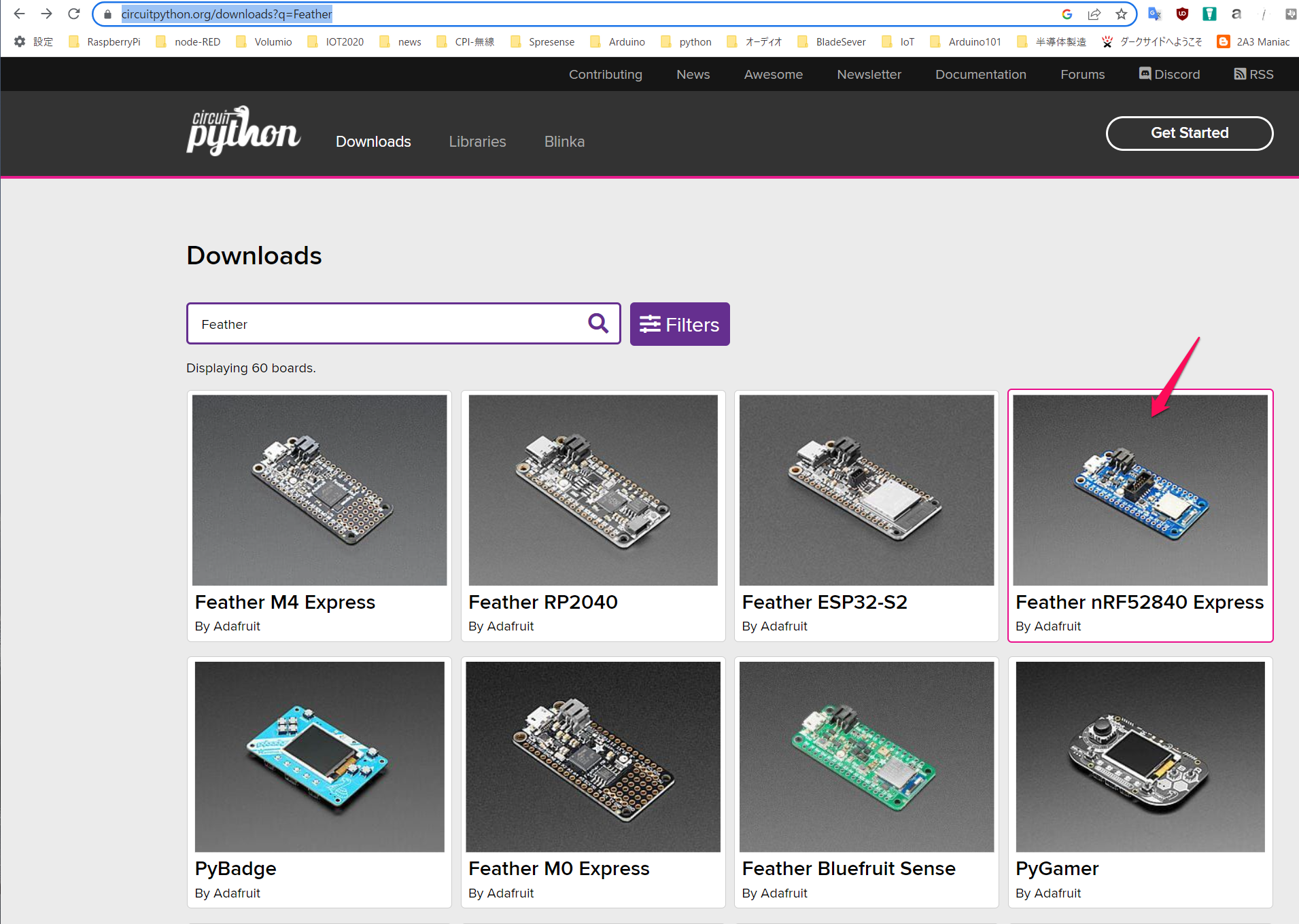
見つかったFeather nRF52840 Expressをクリックします。
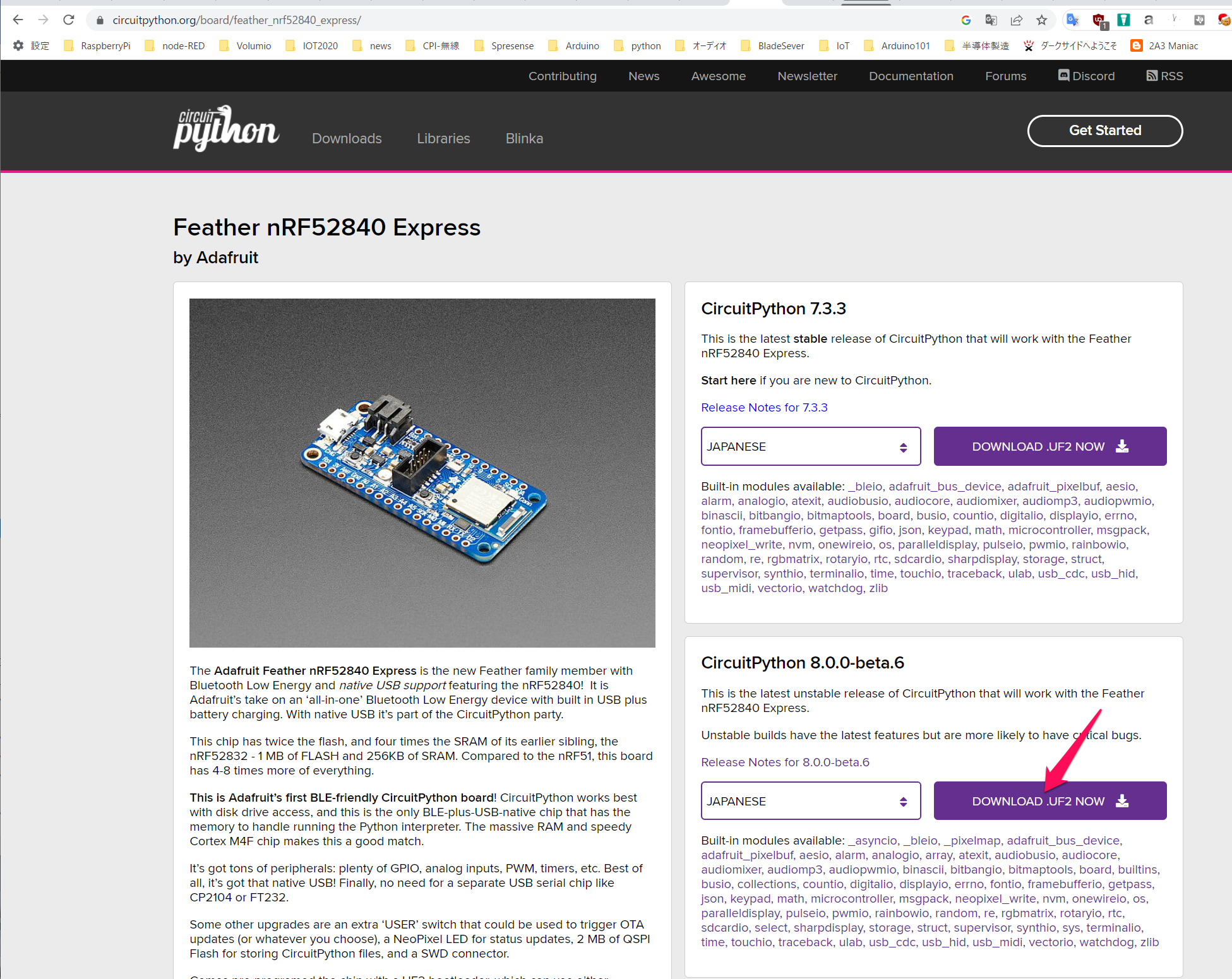
CircuitPython 8.0.0-beta.6のUF2をダウンロードします。
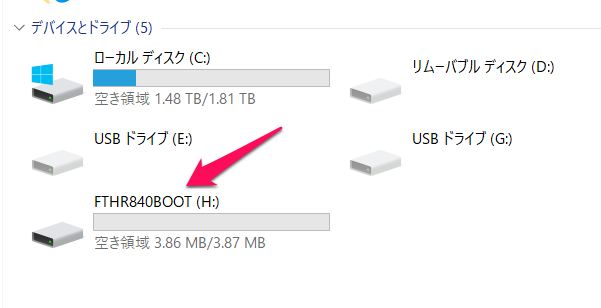
Resetボタンをダブルクリックしてブートローダのドライブをエクスプローラに表示します。
ダウンロードした.UF2ファイルをこのFTHR840BOOTドライブにドラッグします。コピーが終わると、CIRCUITPYという名前のドライブになります。このマイコン・ボードには2Mバイトのストレージがあるので、2MB弱の容量が表示されていると思います。
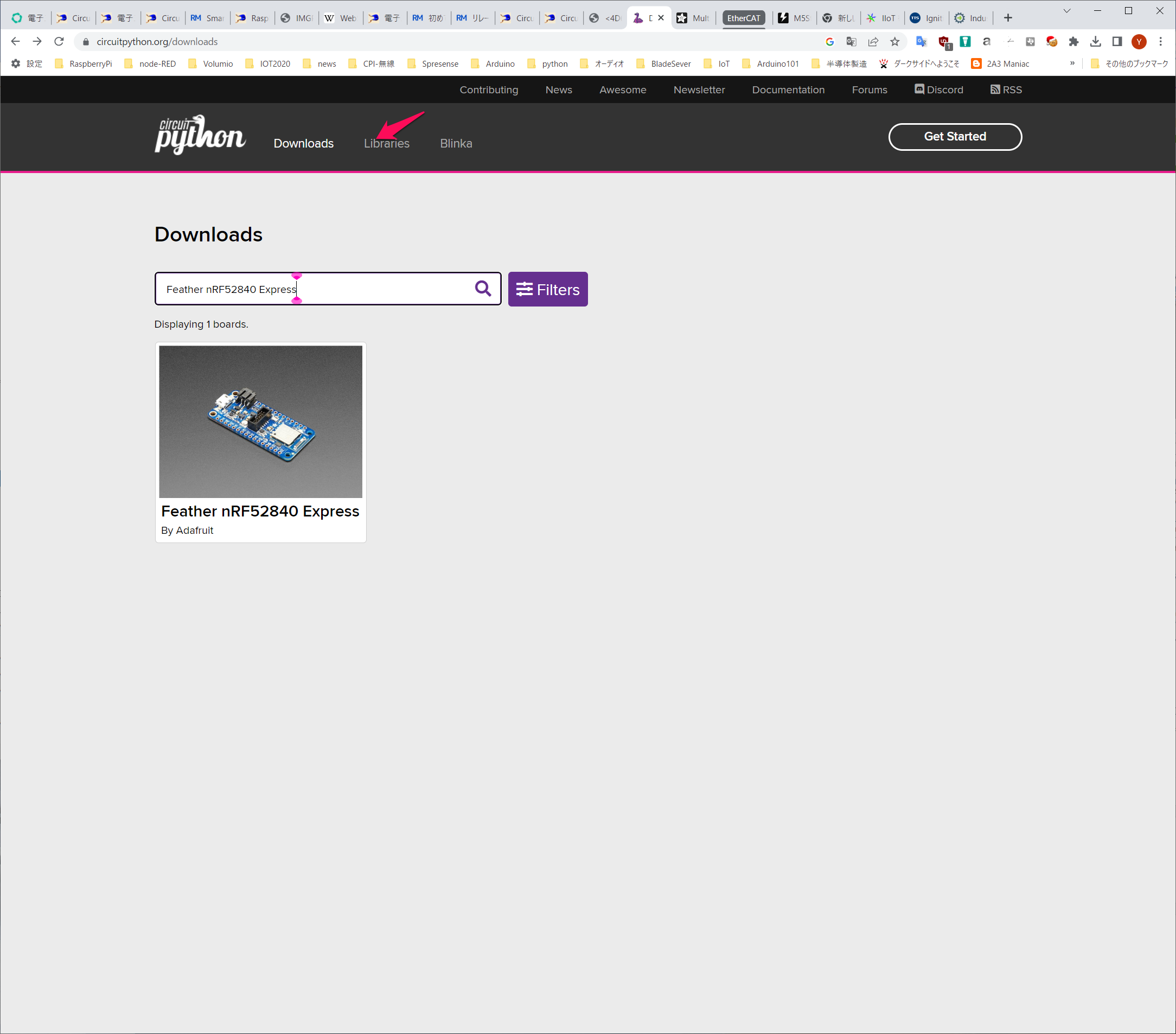
https://circuitpython.org/ に戻ります。Librariesをクリックします。
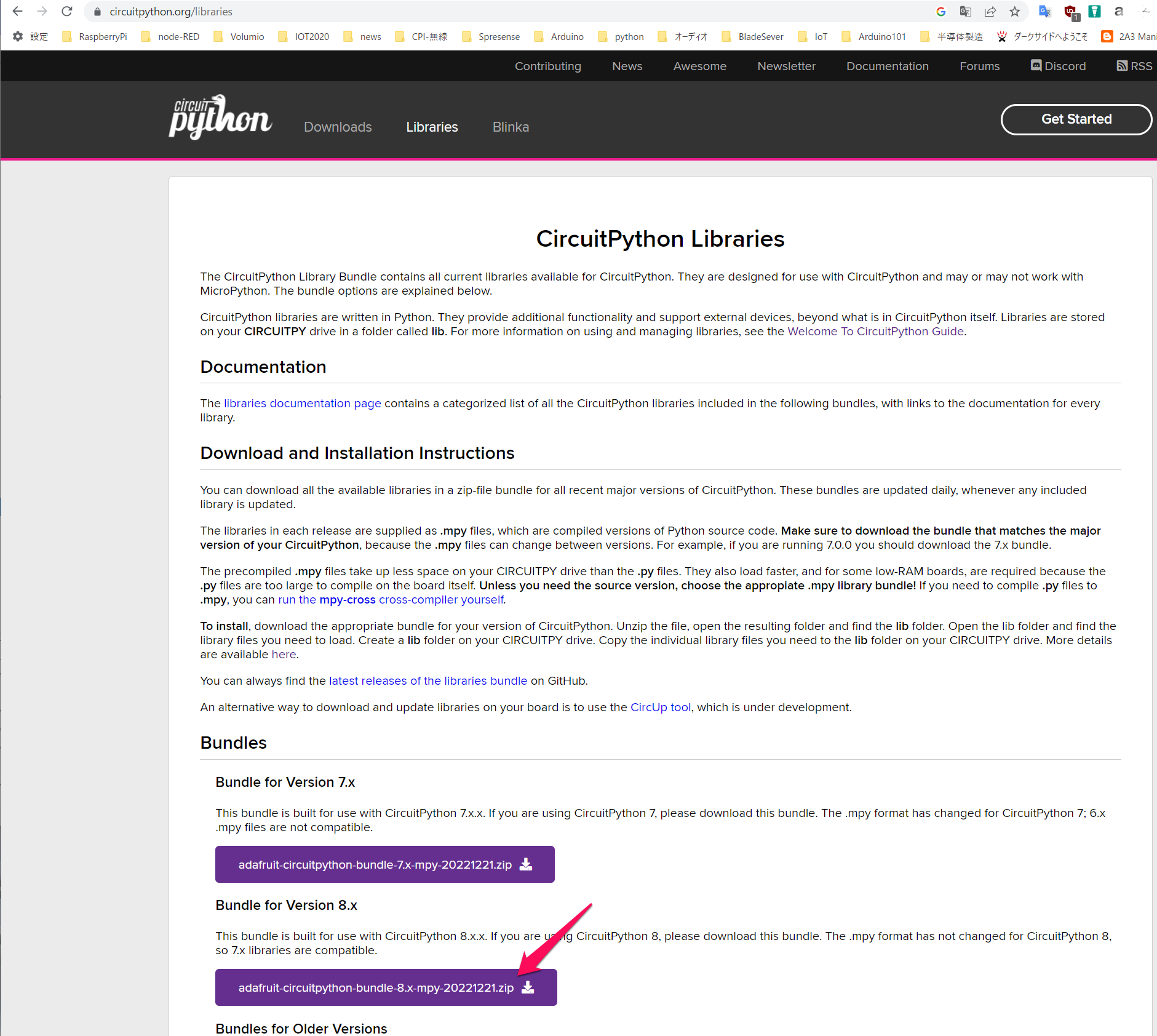
CircuitPython 8の最新版が見えているので、クリックしてダウンロードします。ここでは2020年12月21日版でした。
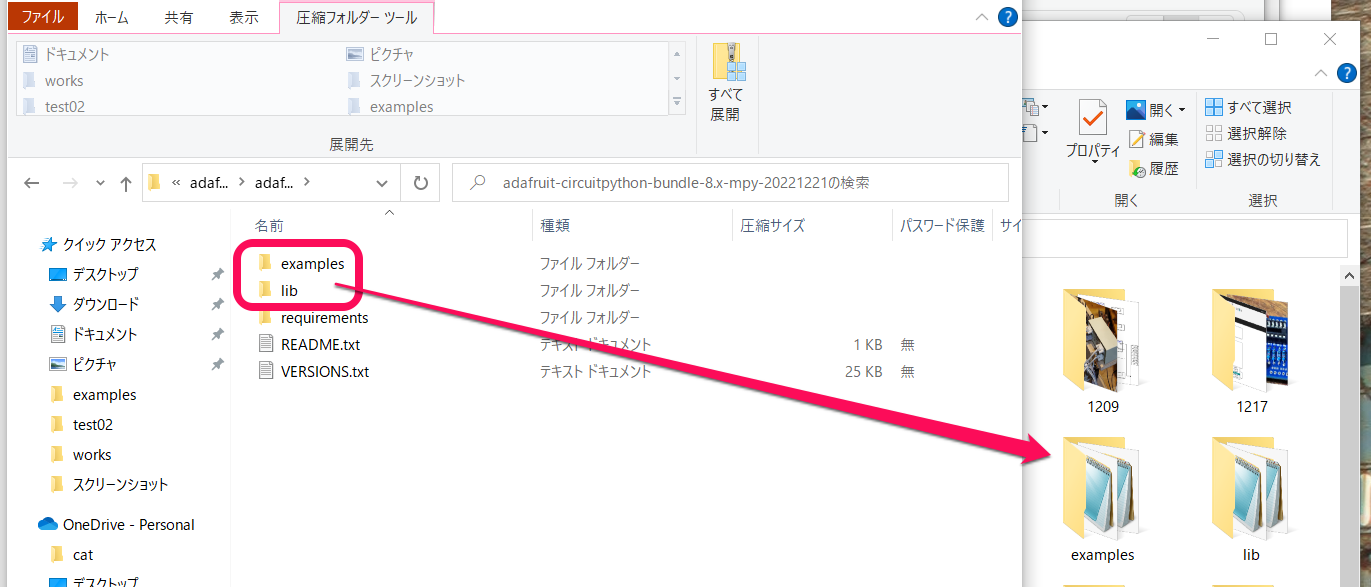
zipファイルをダブルクリックで表示します。examplesとlibフォルダをPCの任意のフォルダにコピー(解凍)します。
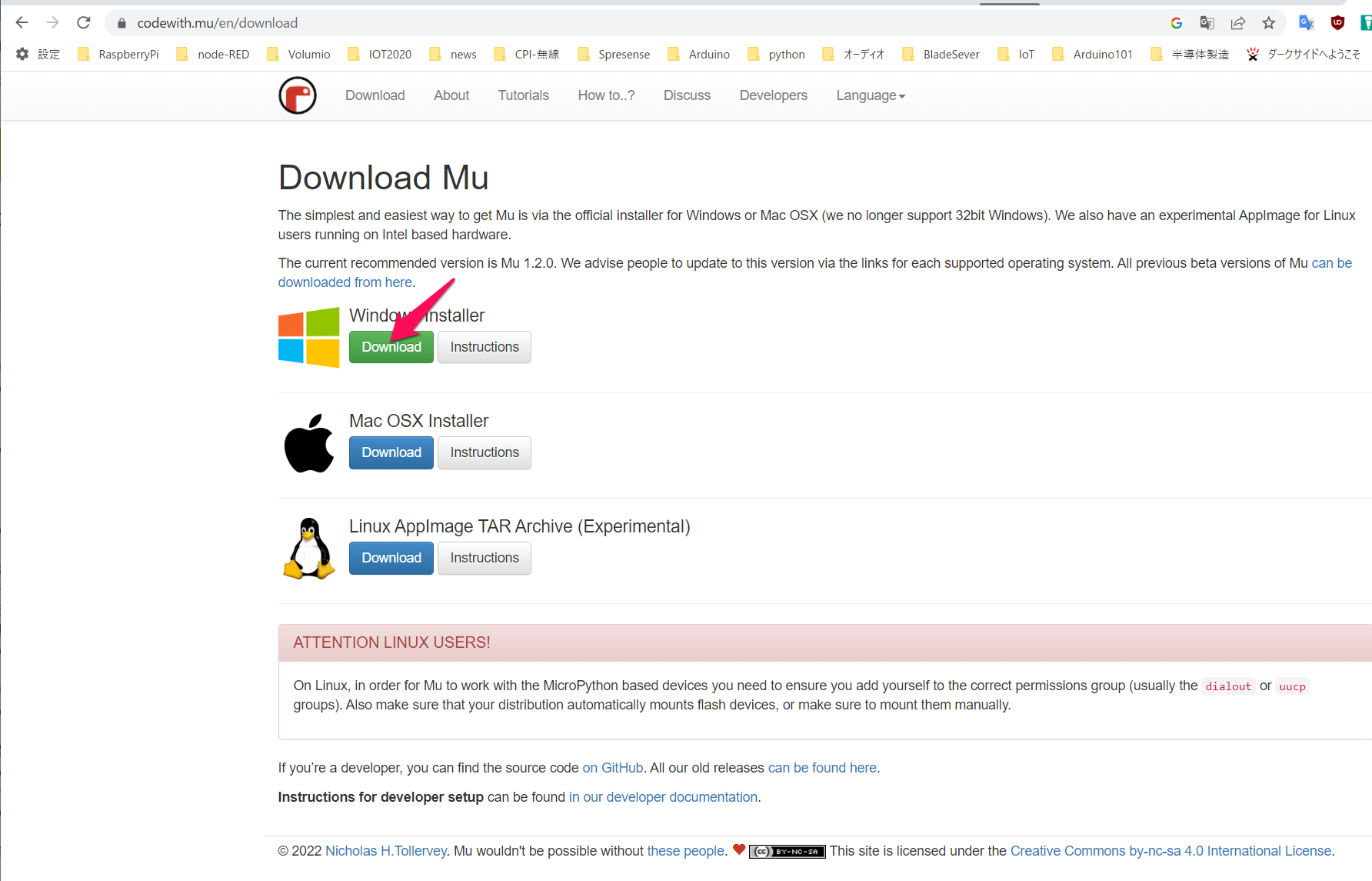
エディタはMuを使う
Muのページに行ってDownloadをクリックします。
Windows用を使いました。現時点で1.2.0です。
アナログ入力
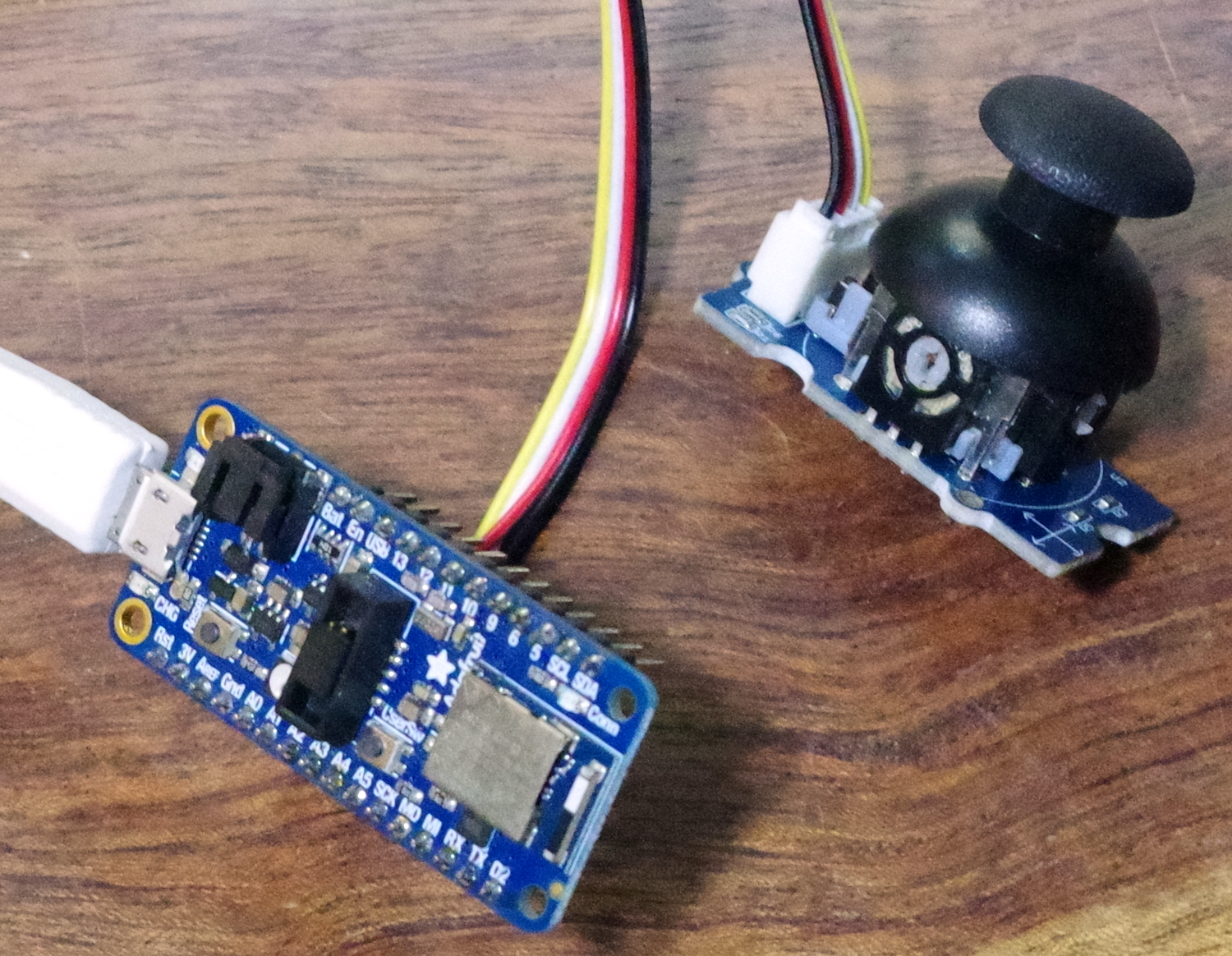
ジョイスティックの電源はマイコン・ボードの3.3VとGNDに、XはA0端子、yはA1端子につなぎました。
PCとFeather nRF52840 ExpressをUSBケーブルでつなぎます。Muエディタを立ち上げると、ボードが認識され、プログラムを書いて保存をクリックするとアップロードされて実行に移ります。
その前にシリアル・アイコンをクリックしておきます。
ジョイスティックはボリュームがつながっていて電圧が2系統出力されます。それをマイコンのアナログ入力読み取ります。
分解能は高いので、入力値はふらふらするので、readXY()関数では20回読み取り、真ん中付近の10回分を平均しています。
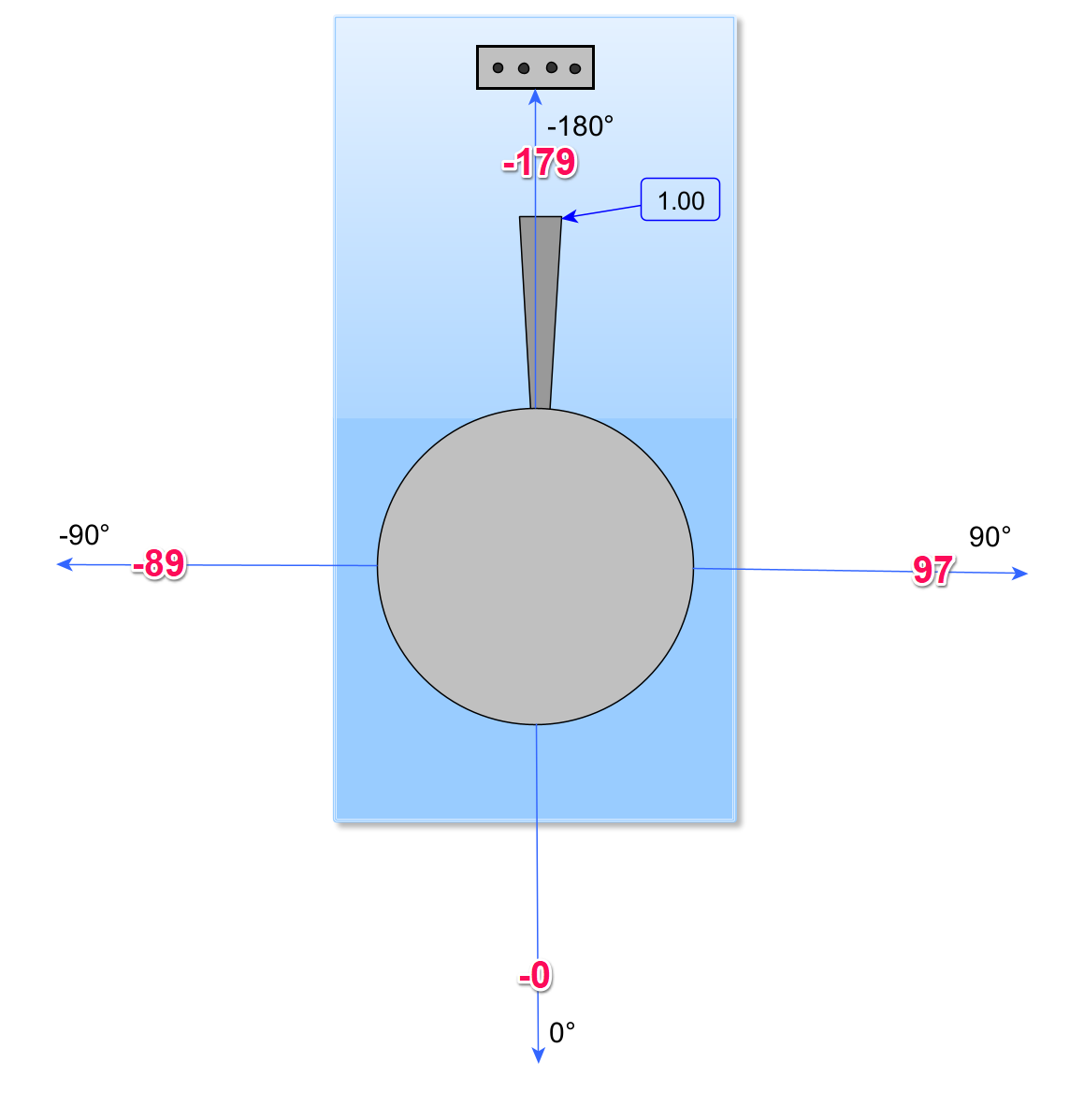
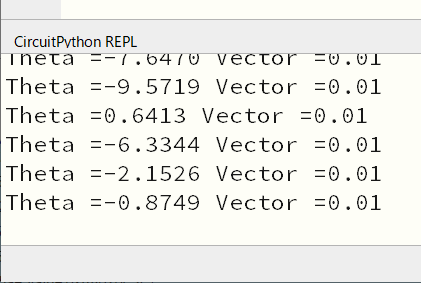
このプログラムを実行します。ジョイスティックを右、左、触らないときの中央値を記録します。それらの値を利用して、x,yの電圧を求め、そこから角度thとベクトル長Veを計算します。
-0.502や-0.5088は、ノブに触らないときに、ほぼ0になるようにするための補正値です。
from board import *
import analogio
import time
import math
pinX = analogio.AnalogIn(A0)
pinY = analogio.AnalogIn(A1)
NUM_SAMPLES = 20
def readXY():
analogDataX=[]
analogDataY=[]
for i in range(NUM_SAMPLES):
analogDataX.append(pinX.value)
analogDataY.append(pinY.value)
time.sleep(0.02)
analogDataX.sort()
analogDataY.sort()
meanX = sum(analogDataX[5:NUM_SAMPLES-5]) / float(len(analogDataX[5:NUM_SAMPLES-5]))
meanY = sum(analogDataY[5:NUM_SAMPLES-5]) / float(len(analogDataY[5:NUM_SAMPLES-5]))
#print(analogData0[5:NUM_SAMPLES-5])
x = 2*(((meanX-16300)/33100)-0.502)
y = 2*(((meanY-15728)/31965)-0.5088)
th = math.atan2(y,x)*180/3.141592
Ve = math.sqrt(x*x + y*y)
return th,Ve
while 1:
print("---")
[th,Ve] = readXY()
print('Theta ={:.4f} Vector ={:.2f}'.format(th,Ve))
time.sleep(2)
pinX.deinit()
pinY.deinit()
ノブを倒したときの角度の実測値です。倒し切ると1.0付近のベクトル値が得られます。
BLEペリフェラル(UART)
ジョイスティックの角度とベクトル長をBLEで送信します。ノルディックのUART機能を利用したプログラムです。テキストで、二つのデータを1回で送っています。
from board import *
import analogio
import time
import math
from adafruit_ble import BLERadio
from adafruit_ble.advertising.standard import ProvideServicesAdvertisement
from adafruit_ble.services.nordic import UARTService
pinX = analogio.AnalogIn(A0)
pinY = analogio.AnalogIn(A1)
NUM_SAMPLES = 20
ble = BLERadio()
ble.name = "Feather nRF52840 Express"
uart = UARTService()
advertisement = ProvideServicesAdvertisement(uart)
def readXY():
analogDataX=[]
analogDataY=[]
for i in range(NUM_SAMPLES):
analogDataX.append(pinX.value)
analogDataY.append(pinY.value)
time.sleep(0.02)
analogDataX.sort()
analogDataY.sort()
meanX = sum(analogDataX[5:NUM_SAMPLES-5]) / float(len(analogDataX[5:NUM_SAMPLES-5]))
meanY = sum(analogDataY[5:NUM_SAMPLES-5]) / float(len(analogDataY[5:NUM_SAMPLES-5]))
#print(analogData0[5:NUM_SAMPLES-5])
x = 2*(((meanX-16300)/33100)-0.502)
y = 2*(((meanY-15728)/31965)-0.5088)
th = math.atan2(y,x)*180/3.141592
Ve = math.sqrt(x*x + y*y)
return th,Ve
while 1:
ble.start_advertising(advertisement)
print('wait')
while not ble.connected:
pass
while ble.connected:
print('connected ')
[th,Ve] = readXY()
print('Theta ={:.4f} Vector ={:.2f}'.format(th,Ve))
uart.write('{:.1f} {:.1f}'.format(th,Ve))
time.sleep(0.2)
pinX.deinit()
pinY.deinit()
実行すると、
ImportError: 'adafruit_ble' という名前のモジュールはありません
と下のエリアに表示されるので、CIRCUITPYドライブのlibに、PCに保存していたlibの中にあるadafruit_bleフォルダをコピーします。
動き始めます。
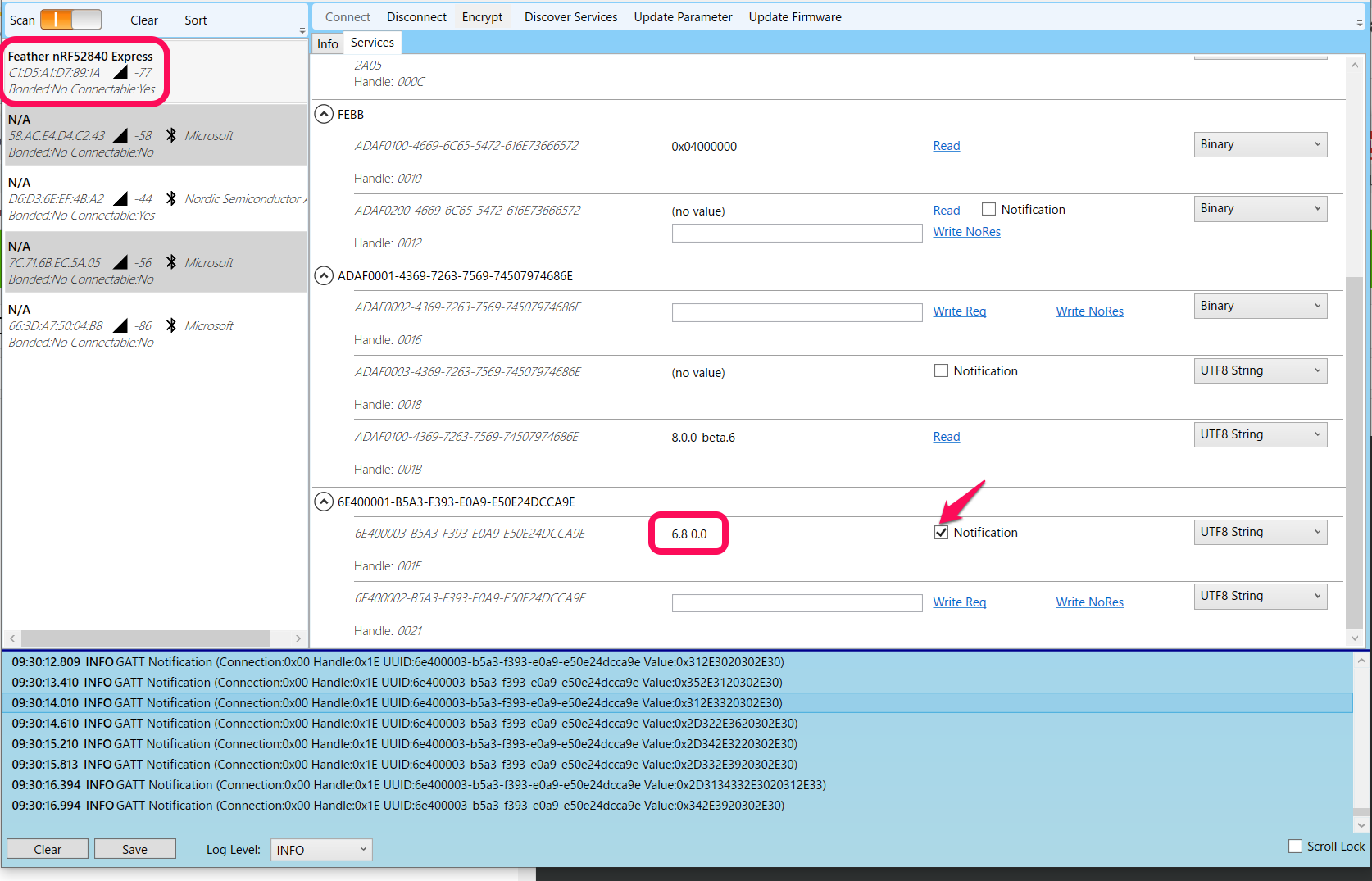
セントラルはRSL10 Bluetooth Low Enaergy Exploer
オンセミのRSL10 Bluetooth Low Enaergy Exploerを起動し、「Feather nRF52840 Express」を見つけ、connectします。
Notificatiopnをチェックすると、最新のデータを送ってくることが確認できます。
実数で送る
UARTはテキストで二つの値を送りました。
実数で送るプログラムを作ります。次の実数Characteristicを定義したクラスをSwitchBot.pyの名前で保存します。メインのcode.pyと同じトップのディレクトリにです。
このクラスの定義は、サンプルがなかったので、独自です。記述方法が正しいかわかりません。examplesにあったJSONの事例とAdafruitのソースを参考にしました。
UUIDは全くの適当な値です。
# SPDX-FileCopyrightText: 2020 Mark Raleson
# SPDX-License-Identifier: MIT
from adafruit_ble.uuid import VendorUUID
from adafruit_ble.services import Service
from adafruit_ble.characteristics import Characteristic
from adafruit_ble.characteristics.float import FloatCharacteristic
class SensorService(Service):
uuid = VendorUUID("51ad213f-e568-4e35-84e4-67af89c79ef0")
sensorsTheta = FloatCharacteristic(
uuid=VendorUUID("e077bdec-f18b-4944-9e9e-8b3a815162b4"),
properties=Characteristic.READ | Characteristic.NOTIFY,
)
sensorsVector = FloatCharacteristic(
uuid=VendorUUID("528ff74b-fdb8-444c-9c64-3dd5da4135ae"),
properties=Characteristic.READ | Characteristic.NOTIFY,
)
def __init__(self, service=None):
super().__init__(service=service)
self.connectable = True
メインのプログラムcode.pyです。
from board import *
import analogio
import time
import math
from adafruit_ble import BLERadio
from SwitchBot import SensorService
from adafruit_ble.advertising.standard import ProvideServicesAdvertisement
pinX = analogio.AnalogIn(A0)
pinY = analogio.AnalogIn(A1)
NUM_SAMPLES = 20
ble = BLERadio()
sService = SensorService()
advertisement = ProvideServicesAdvertisement(sService)
ble.name = "Feather nRF52840 Express"
def readXY():
analogDataX=[]
analogDataY=[]
for i in range(NUM_SAMPLES):
analogDataX.append(pinX.value)
analogDataY.append(pinY.value)
time.sleep(0.02)
analogDataX.sort()
analogDataY.sort()
meanX = sum(analogDataX[5:NUM_SAMPLES-5]) / float(len(analogDataX[5:NUM_SAMPLES-5]))
meanY = sum(analogDataY[5:NUM_SAMPLES-5]) / float(len(analogDataY[5:NUM_SAMPLES-5]))
#print(analogData0[5:NUM_SAMPLES-5])
x = 2*(((meanX-16300)/33100)-0.502)
y = 2*(((meanY-15728)/31965)-0.5088)
th = math.atan2(y,x)*180/3.141592
Ve = math.sqrt(x*x + y*y)
return th,Ve
while 1:
print("Advertise services")
ble.stop_advertising() # you need to do this to stop any persistent old advertisement
ble.start_advertising(advertisement)
print("Waiting for connection...")
while not ble.connected:
pass
ble.stop_advertising()
print("Connected")
while ble.connected:
[th,Ve] = readXY()
print('Theta ={:.4f} Vector ={:.2f}'.format(th,Ve))
sService.sensorsTheta = th
sService.sensorsVector = Ve
time.sleep(0.2)
pinX.deinit()
pinY.deinit()
print("Disconnected")
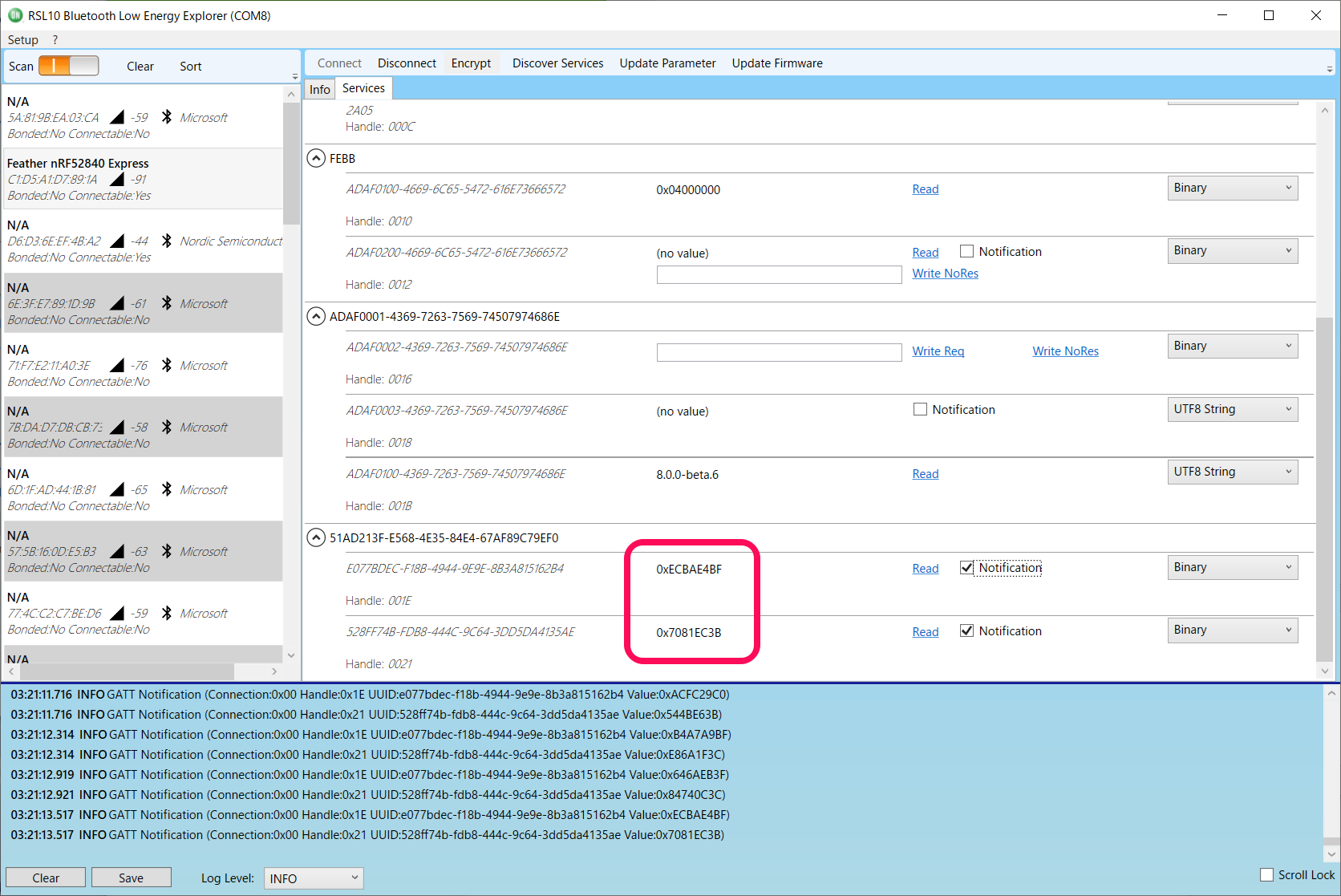
実行中の様子です。
オン・セミコンダクターのRSL10 Bluetooth Low Enaergy Exploerを使ってconnectし、Characteristicの情報を見ます。セントラルの立場です。
4バイトの実数が届いています。