本記事の目的
AUTOSAR R25-11 (Adaptive Platform)の更新内容がなんとなく理解できること。
本記事ではRelease Overviewに記載されていることは、[Overview]と記載する。
Overviewを読んで解釈した内容や、コメントについては[メモ]と記載する。
関連記事:
R24-11 CPのReleaseOverview記事
参照文書
2 Summary of Changes in Release R25-11
2.1 Concepts
2.1.1.1 Vehicle Data Protocol
[Overview]
Vehicle Data Protocol(VDP)は,量産車両に搭載された分散ECUからデータを収集するために特別に設計されたプロトコルとして導入されている。
このプロトコルが車載データ収集に適している重要な理由の1つは,サンプリングと送信を体系的に分離しつつ,柔軟なサンプリングおよび送信戦略をサポートしている点にある。
[メモ]
Overviewの説明を見てもよくわからなくて、他のドキュメントを見るとなんとなくやりたいことが見えてくる。
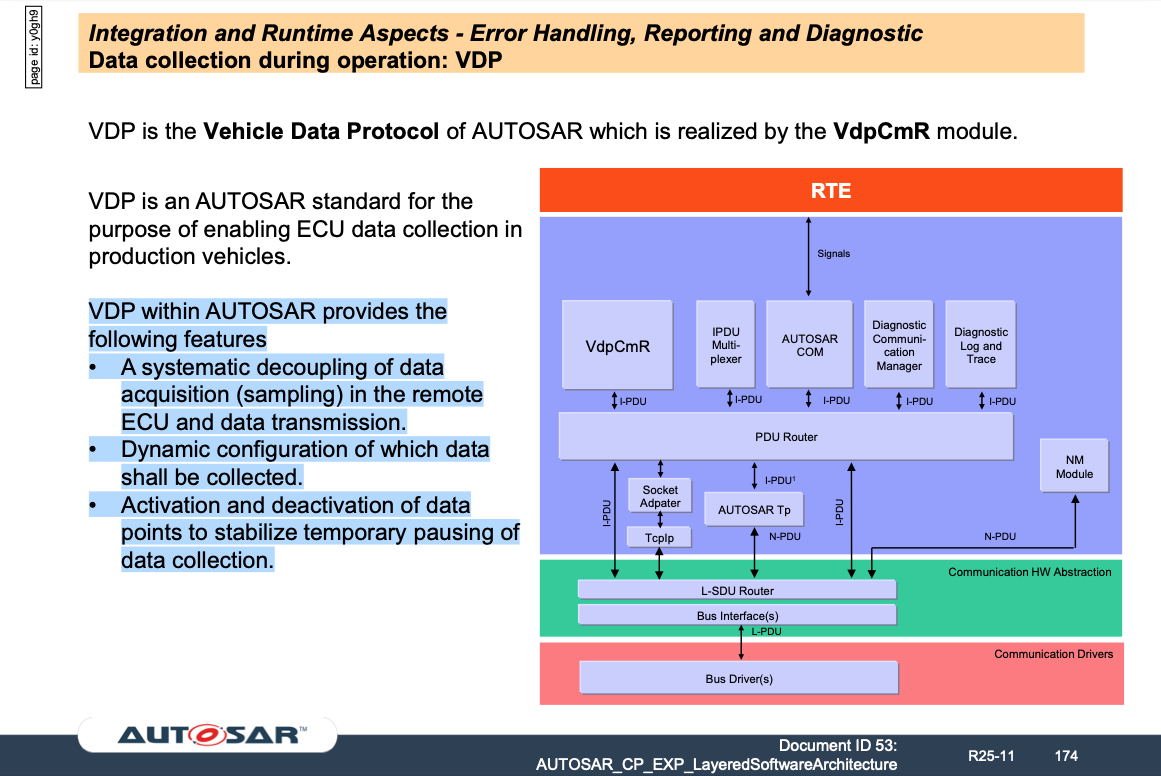
AUTOSAR内のVDPは以下の機能を提供します。
・リモートECUでのデータ取得(サンプリング)とデータ送信の体系的な分離。
・収集するデータの動的設定。
・データ収集の一時停止を安定させるためのデータポイントの有効化および無効化
問題: 量産車両で動的なデータ収集が難しく、多ECU間でのタスク分散が非効率で、標準化された管理手法がなく、サンプリング・送信戦略の調整が不十分な点。
解決策: Vehicle Data Protocol (VDP)を通信標準として導入し、データ収集のトリガ・設定、リアルタイム高頻度データ転送、低頻度凝縮データ転送を実現し、ベンダー固有仕様を避ける。
新しいVDPのSWS
※SWSには図がほとんどなくてわかりにくい。
VDPの仕様
HPC上の中央データ収集ユニットからリモートECU(特にClassic Platform ECU)へデータ収集タスクを分散させるニーズに対応することを目的としている。
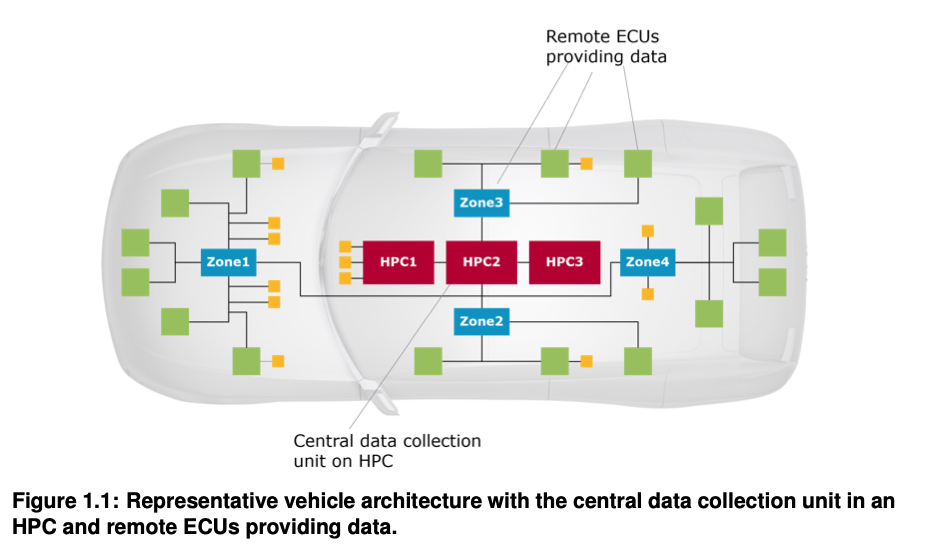
この目的を達成するため、VDPは中央収集ユニットから制御されるリモートECUにおける4つの異なるサンプリングモードの技術的実現を提供します。
- サンプリングモード
- Cyclic: データポイントをリモートECUで周期的にサンプリングします。
- On-change: データポイントの値が変化したときのみサンプリングします(「変化」の定義はデータポイントタイプ/DCA Remoteごとに設定可能で、プロトコルで制限されません。例: ≠比較、数値範囲の入出)。
- Cyclic and on-change: データポイントを周期的または変化時に追加サンプリングします。
- On-request: リモートECUが特定のトリガ要求(6.3.5参照)を受信したときのみサンプリングします。
-
送信モード
VDPはサンプリングと送信の体系的分離を実現し、リモートECUのコンポーネントでデータポイントサンプルをバッファリングし、時間的に分離して送信します。以下の3つの送信モードをサポートします。
- Cyclic: バッファリングされた全データポイントサンプルを周期的に送信。
- On-sampling: 特定データポイントがサンプリングされたときに全バッファを送信。
- On-request: トリガ要求受信時に全バッファを送信。
- Default: 特定バッファ条件満た時に全バッファを送信。
すべてのモードで過剰サンプリングによるECUブロックや過多メッセージによるバスブロックを防ぐ対策が定義されています。
2.1.1.2 Revise MACsec Support
[Overview]
このコンセプトは、AUTOSAR Classic Platformの通信スタックにおけるMACsecサポートに関する仕様のギャップと曖昧な要件に焦点を当てています。
主な改善点・導入機能↓
- Ethernetトポロジ明確化: 現在のAUTOSAR仕様でサポートされるEthernetハードウェアトポロジを明確化
- SAK処理精緻化: MKAにおけるSAK処理の記述を精緻化
- MKAシーケンス図: MKAプロトコルに基づくサーバとピア間の相互作用を示すMKAシーケンス図を導入
- リンクダウン処理: MKAモジュールにおけるリンクダウン処理を導入
- 高速起動初期化: MKAモジュールの高速起動に重要な初期化アクションを導入
- LSduR送受信: LSduR経由でのMKAの送受信を導入
- リトライ処理: 下位層へのAPIコールに対するMKAのリトライ処理を導入
新規サポート機能↓
- Ethernetスイッチポート: MACsecサポートを導入
- Ethernetコントローラ: MACsecサポートを導入
- MACマルチキャスト: MACマルチキャストアドレスをバイパスルールとして導入
API・処理の明確化↓
- MACsec API: EthIf、EthSwt、EthTrcv、EthドライバにおけるMACsec API処理を明確化
- 直接アドレス指定: EthIfとEthernetドライバ層間の効率的な直接アドレス指定を導入
- リンク状態処理: MACsec設定および運用状態に関連するEthIfのリンク状態処理を明確化
その他↓
- バグ修正: 過去数ヶ月で指摘されたバグ修正を組み込み
2.1.1.3 COMHandler
[Overview]
このコンセプトは、アプリケーションを通信シグナルの種類(ECU間またはECU内)から抽象化し、コード変更を減らし、再利用性と柔軟性を向上させる方法を提供します。
そのために、通信エラーの抽象化、エラー監視(データ整合性、受信期限監視、データ無効性、データ範囲チェック)、エラー報告機能を提供します。
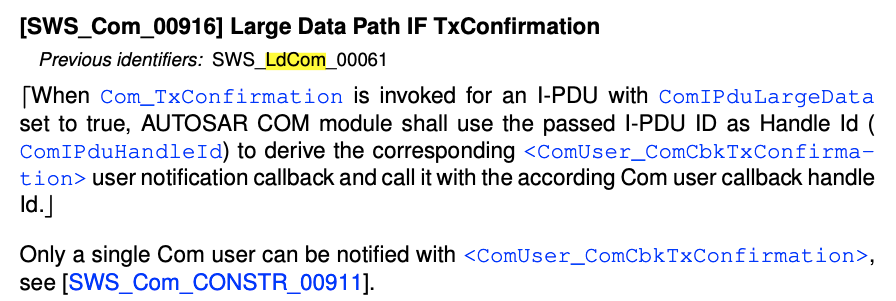
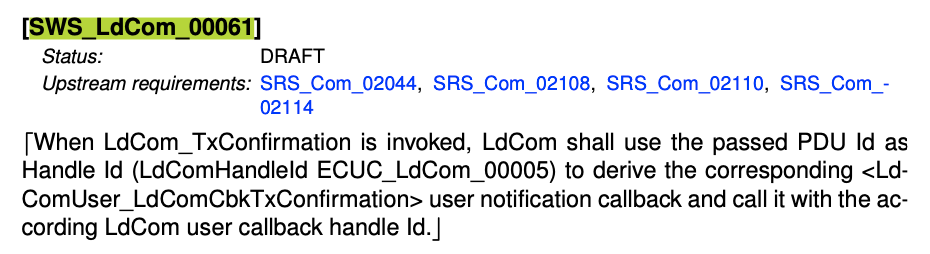
さらに、LdCom機能をComに統合します。
[メモ]
R24-11は大きいデータを扱うコンポーネントLdComが存在していたが、Comに統合されている。
内容はほぼ変わってなさそう。コンポーネントとして独立させるメリットがなかったのではないか。
LdComの要件IDが合わせて記載されている。
統合されたComの仕様例:
2.1.1.4 PRS Time Synchronization Over Can Protocol
[Overview]
このコンセプトは、既存の仕様CP SWS TimeSyncOverCANを2つのドキュメントに分割します。
FO PRS TimeSyncOverCANProtocolには、AUTOSAR実装外でも使用可能な純粋なプロトコル仕様が含まれます。
CP SWS TimeSyncOverCANは、AUTOSARコンテキストでのプロトコル仕様の実装方法を規定します。
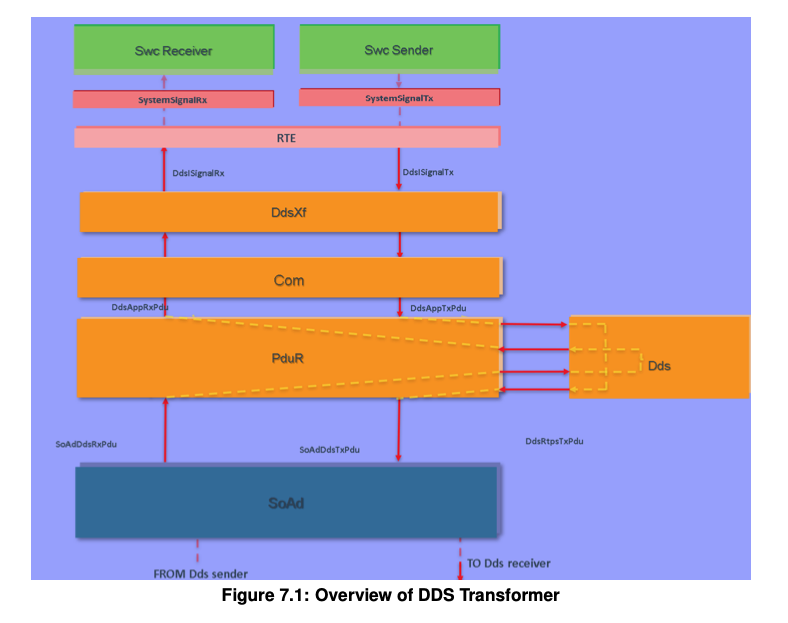
2.1.1.5 DDS Support on Classic Platform
[Overview]
DDSプロトコルにサービス指向アーキテクチャ(SOA)サポートを導入します。
これまでSOME/IPで利用可能だったイベント、メソッド、フィールドの管理機能がDDSに拡張され、QoSパラメータを各種レベルで定義できるネイティブ機能により柔軟性が向上します。
この拡張は以下の2つの主要コンポーネントに機能分割して実現されます:
・ECUCモデル内にSOA機能個別の細かな実装を目的とした新規オブジェクトの導入。ClientServerInterfaceの完全サポートおよび新規BSWモジュール「DDS Transformer」の導入。
・OMG SPDP/SEDPディスカバリプロトコルと、AUTOSAR Adaptive Platformで定義済みのService Discoveryプロトコルの統合により、ソリューション間互換性を確保。
この統合は、モデル拡張とSystem Template内でのシステムレベル要件仕様により、プラットフォーム全体のアーキテクチャ一貫性を確保します。
[メモ]
RteとComの間にDdsXf(DDS Transformer)コンポーネントを追加してPDUバッファを作成するSerializerクラスの変換を担う。