発想は至極単純です。不変とされる光速度を、時間と空間に分離して伸び縮みさせたら不変基準が勿体無いので、光速度を直接基準としてみた(一度くらいは頭を過りますよね?)ところ
- 時刻は無限次元空間の座標
- ユークリッド空間の絶対静止座標系
- 時間経過は座標変化
- 時間軸は座標の変化方向
- 各々に固有
- 相対速度
- 絶対速度の差ではない
- 入れ物としての(空っぽの)時空は不要
- 概念としての絶対速度も不要
- 時間軸の方向差
- 最大が光速度
-
慣性は錯覚だった
- 等価原理ではなく等価?
- 空間は時間と対で固有
- もしかして「波動と粒子の二重性」の本質か?
- 絶対速度の差ではない
- 加速は時間軸の方向変化(回転)
- 情報は失われない?
- 旋回加速と直線的加速は同質の回転
- 宇宙の始まりは点でなくてもよい
となりました。
光速度と時間経過を整理する
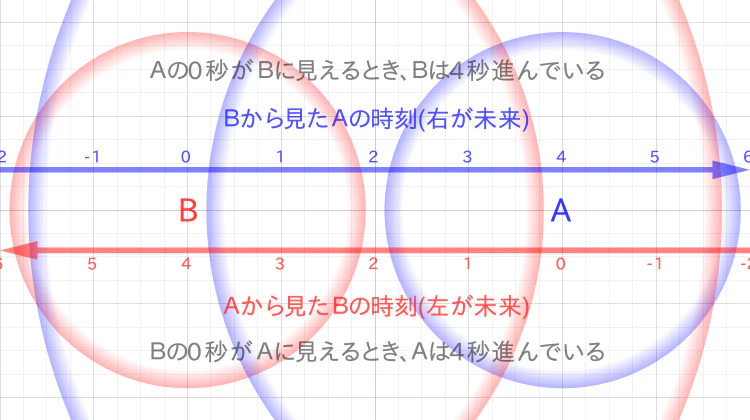
平面にAとBを置き、互いは静止関係にあるとします。AとBは離れていて、Aが見ているBは、Bから出た光がAに届くまで時間がかかるので、過去の情報になっています。Bが見ているAも同様です。

光の進行方向に数直線を置いて時を刻んでみます。
2方向の数直線に着目し(A,Bおよび縦方向軸を忘れ)て1秒進めてみます。
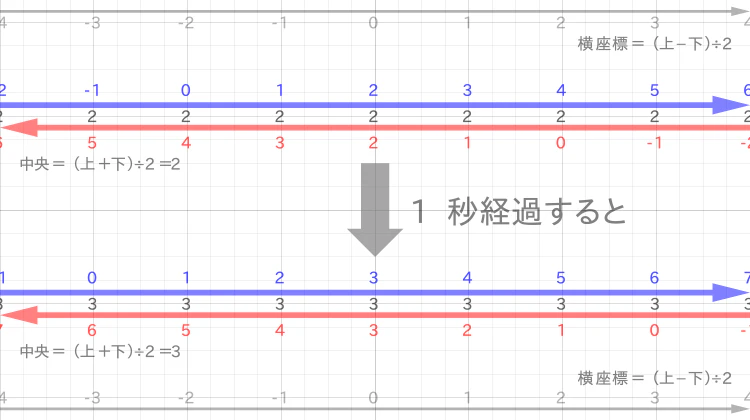
上下の中間は $\frac{上+下}{2}$ としました。これは全て同じ値になります。何秒経過しても同じ値で更新されます。以下、GIF 動画(ループを繋ぐため、9 の次は 0)です。
上側(青)を $C_R$ ,下側(赤)を $C_L$とすると、時間 $T$ は
T = \frac{ C_R + C_L }{2}
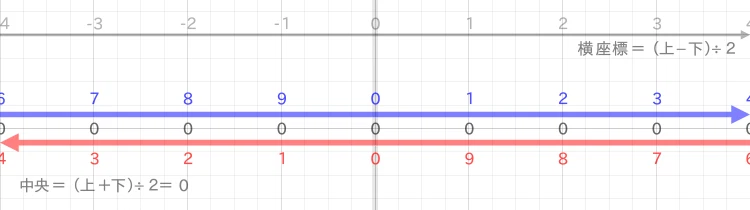
右方向が正の横座標 $X$ は
X = \frac{ C_R - C_L }{2}
として、二つの光速度から時間と空間を表せるようです。図の場合、$C_R$ と $C_L$ が同じ場所が横座表の原点になります。
$C_R,C_L,T,X$ の関係は
\begin{eqnarray}
C_R & = & T + X \\
C_L & = & T - X \\
T & = & \frac{ C_R + C_L }{2} \\
X & = & \frac{ C_R - C_L }{2} \\
\end{eqnarray}
だから、オイラーの公式
(三角関数)
\begin{eqnarray}
e^{i \theta} & = & \cos \theta + i \sin \theta \\
e^{-i \theta} & = & \cos \theta - i \sin \theta \\
\cos \theta & = & \frac{ e^{i \theta} + e^{-i \theta} }{2} \\
i \sin \theta & = & \frac{ e^{i \theta} - e^{-i \theta} }{2} \\
1 & = & \cos^2 x + \sin^2 x \\
\end{eqnarray}
(双曲線関数)
\begin{eqnarray}
e^{x} & = & \cosh x + \sinh x \\
e^{-x} & = & \cosh x - \sinh x \\
\cosh x & = & \frac{ e^{x} + e^{-x} }{2} \\
\sinh x & = & \frac{ e^{x} - e^{-x} }{2} \\
1 & = & \cosh^2 x - \sinh^2 x \\
\end{eqnarray}
と同じ形をしていることが、とても気になります。
それはさておき、$C_R$ と $C_L$ が直交する座標系の図にすると
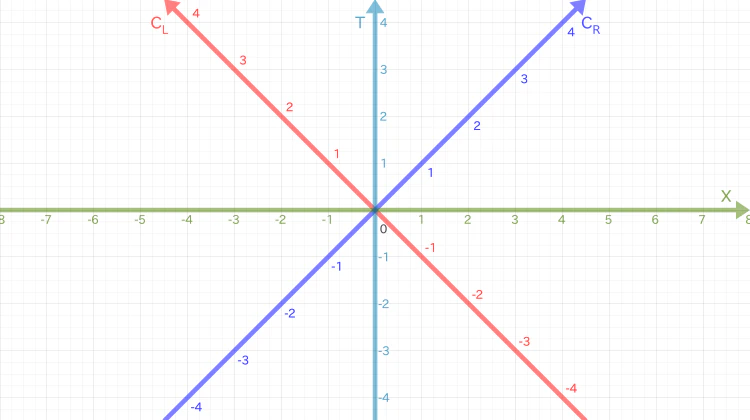
になります。これを、$C_L$ と $C_R$ の二軸の光速度(基準)による平面と捉えます。すると
どの方向に進んでも光速度を表す
世界があることになります。時間軸 $T$ も光速度を表すことになりますが、何に対しての光速度でしょうか。単純に答えが出れば苦労しないので、別の切り口を考えます。
光速度、時間方向、空間方向をベクトルで表す
時間の単位を秒として、空間中の長さの単位を「$c$=光速度×1秒」で考えます。
時間方向 $\vec{T}$ と空間方向 $\vec{X}$ を
\begin{eqnarray}
\vec{T} & = & \left( 0,1 \right) \\
\vec{X} & = & \left( 1,0 \right) \\
\\
|\vec{T}| & = & 1秒\\
|\vec{X}| & = & 1c \\
\end{eqnarray}
とすると、2方向の上(光速度) $\vec{C_R}$ と下(光速度) $\vec{C_L}$ は
\begin{eqnarray}
\vec{C_R} & = & \vec{T} + \vec{X} = \left( +1,1 \right) \\
\vec{C_L} & = & \vec{T} - \vec{X} = \left( -1,1 \right) \\
\end{eqnarray}
と考えることができます。$\vec{C_R},\vec{C_L}$ に対して、$\vec{T},\vec{X}$ は
\begin{eqnarray}
& & \vec{T} = \frac{1}{2} \left( \vec{C_R} + \vec{C_L} \right) \\
& & \vec{X} = \frac{1}{2} \left( \vec{C_R} - \vec{C_L} \right) \\
\end{eqnarray}
になります。「時間と空間」の比が 「$1:1$」 になる物理単位ならば、$\vec{C_R},\vec{C_L}$ の内積は
\begin{eqnarray}
\vec{C_R} \cdot \vec{C_L} & = & \left( \vec{T} + \vec{X} \right) \cdot \left( \vec{T} - \vec{X} \right) \\
& = & \vec{T} \cdot \vec{T} - \vec{X} \cdot \vec{X} \\
& = & \left| \vec{T} \right|^2 - \left| \vec{X} \right|^2 \\
& = & 0 \\
\end{eqnarray}
だから直交になります。これで、ベクトル成分の数に関係なく全方向で同じ性質になると考えられます。
空間のベクトル成分を増やしてみる
$\vec{C_L},\vec{C_R},\vec{T},\vec{X}$ に、二軸の空間を追加して、三次元空間と時間の四次元時空
\begin{eqnarray}
\vec{T} & = & \left( 0,0,0,1 \right) \\
\vec{X} & = & \left( 0,0,1,0 \right) \\
\vec{C_R} & = & \vec{T} + \vec{X} = \left( 0,0,+1,1 \right) \\
\vec{C_L} & = & \vec{T} - \vec{X} = \left( 0,0,-1,1 \right) \\
\end{eqnarray}
とします。この $\vec{C_R}$ を視点 $\vec{T_2}$ として、対となる空間軸 $\vec{X_2}$ を追加して、光速度 $\vec{C_2}$ を考えると
\begin{eqnarray}
\vec{T_2} & = & \left( 0,0,1,1 \right) = \vec{C_R} \\
\vec{X_2} & = & \left( 0,\sqrt{2},0,0 \right) \\
\vec{C_2} & = & \left( 0,\sqrt{2},1,1 \right) = \vec{T_2} + \vec{X_2} \\
\| \vec{T_2} \| & = & \| \vec{X_2} \| \\
\end{eqnarray}
「二次元空間と時間」の三次元時空を考えることができます。同様に、$\vec{C_2}$ に対しては
\begin{eqnarray}
\vec{T_1} & = & \left( 0,\sqrt{2},1,1 \right) = \vec{C_2} \\
\vec{X_1} & = & \left( 2,0,0,0 \right) \\
\vec{C_1} & = & \left( 2,\sqrt{2},1,1 \right) = \vec{T_1} + \vec{X_1} \\
\| \vec{T_1} \| & = & \| \vec{X_1} \| \\
\end{eqnarray}
が考えられます。$\vec{C_3}=\vec{C_R}$ として、$\vec{C_n}$ を並べると
\begin{eqnarray}
\vec{C_1} & = & \left( 2,\sqrt{2},1,1 \right) \\
\vec{C_2} & = & \left( 0,\sqrt{2},1,1 \right) \\
\vec{C_3} & = & \left( 0,0,1,1 \right) \\
\end{eqnarray}
になります。ここで、$\vec{T}$ が五次元時空での光速度になるには
\begin{eqnarray}
\vec{T} & = & \left( 0,0,0,1 \right) \\
& \to & \left( 0,0,0,\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}} \right) = \vec{C_4} = \vec{T_3} \\
\\
\vec{T_4} & = & \left( 0,0,0,0,\frac{1}{\sqrt{2}} \right) \\
\vec{X_4} & = & \left( 0,0,0,\frac{1}{\sqrt{2}}, 0 \right) \\
\vec{C_4} & = & \left( 0,0,0,\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}} \right) = \vec{T_4} + \vec{X_4} \\
\end{eqnarray}
が考えられます。$\vec{T_3}$ は $\vec{T_4}$ から見ると光速度です。 $\vec{T_4}$ も同様に、六次元時空での光速度は
\begin{eqnarray}
\vec{T_4} & = & \left( 0,0,0,0,\frac{1}{\sqrt{2}} \right) \\
& \to & \left( 0,0,0,0,\frac{1}{2},\frac{1}{2} \right) = \vec{C_5} \\
\\
\vec{T_5} & = & \left( 0,0,0,0,0,\frac{1}{2} \right) \\
\vec{X_5} & = & \left( 0,0,0,0,\frac{1}{2}, 0 \right) \\
\vec{C_5} & = & \left( 0,0,0,0,\frac{1}{2},\frac{1}{2} \right) = \vec{T_5} + \vec{X_5} \\
\end{eqnarray}
だから、以下同文となって無限次元に拡張されます。$\vec{C_n}$ を整理するには、定数
w = \frac{1}{\sqrt{2}} \\
を使って、$| \vec{C_1} | = 1$ となるよう正規化
\begin{eqnarray}
\vec{C_1} & = & \left( w^1, w^2, w^3, w^4, w^5, w^6, \cdots \right) \\
\| \vec{C_1} \|^2
& = & w^2 + w^4 + w^6 + w^8 + w^{10} + w^{12} + \cdots \\
& = & \sum_{n=1}^{\infty}{w^{2n}}
= \frac{1}{2} + \frac{1}{4} + \frac{1}{8} + \frac{1}{16} + \frac{1}{32} + \frac{1}{64} + \cdots \\
& = & 0.111111\cdots\ _{2進数} \\
& = & 1 \\
\end{eqnarray}
すると、$\vec{C_n}$ は
\begin{eqnarray}
\vec{T_0} = \vec{C_1} & = & \left( w^1, w^2, w^3, w^4, w^5, w^6, \cdots \right) \\
\vec{T_1} = \vec{C_2} & = & \left( 0, w^2, w^3, w^4, w^5, w^6, \cdots \right) \\
\vec{T_2} = \vec{C_3} & = & \left( 0, 0, w^3, w^4, w^5, w^6, \cdots \right) \\
\vec{T_3} = \vec{C_4} & = & \left( 0, 0, 0, w^4, w^5, w^6, \cdots \right) \\
\vec{T_4} = \vec{C_5} & = & \left( 0, 0, 0, 0, w^5, w^6, \cdots \right) \\
\cdots \\
\end{eqnarray}
と表現することができます。$\vec{T_n}=\vec{C_{n+1}}$ を変形すると
\begin{eqnarray}
\vec{T_0} = \vec{C_1} & = & w^0 \left( w^1, w^2, w^3, w^4, w^5, w^6, \cdots \right) \\
\vec{T_1} = \vec{C_2} & = & w^1 \left( 0, w^1, w^2, w^3, w^4, w^5, \cdots \right) \\
\vec{T_2} = \vec{C_3} & = & w^2 \left( 0, 0, w^1, w^2, w^3, w^4, \cdots \right) \\
\vec{T_3} = \vec{C_4} & = & w^3 \left( 0, 0, 0, w^1, w^2, w^3, \cdots \right) \\
\vec{T_4} = \vec{C_5} & = & w^4 \left( 0, 0, 0, 0, w^1, w^2, \cdots \right) \\
\cdots \\
\end{eqnarray}
になるので、次の省略記号
T_w = w^1, w^2, w^3, w^4, w^5, w^6, \cdots
を用いて
\begin{eqnarray}
\vec{T_0} = \vec{C_1} & = & w^0 \left( T_w \right) \\
\vec{T_1} = \vec{C_2} & = & w^1 \left( 0, T_w \right) \\
\vec{T_2} = \vec{C_3} & = & w^2 \left( 0, 0, T_w \right) \\
\vec{T_3} = \vec{C_4} & = & w^3 \left( 0, 0, 0, T_w \right) \\
\vec{T_4} = \vec{C_5} & = & w^4 \left( 0, 0, 0, 0, T_w \right) \\
& & \cdots \\
\vec{T_n} = \vec{C_{n+1}} & = & w^n \left( 0_1, 0_2, 0_3, 0_4, \cdots, 0_n, T_w \right) \\
\end{eqnarray}
と表記することにします。(上記 $0_n$ の添字 $n$ は成分の番号です)
$\vec{T_n}$ に対する空間 $\vec{X_n}$ は
Z_w = 0, 0, 0, 0, 0, 0, \cdots
の省略記号を用意して
\begin{eqnarray}
\vec{X_0} & = & w^0 \left( Z_w \right) \\
\vec{X_1} & = & w^1 \left( x_1, Z_w \right) \\
\vec{X_2} & = & w^2 \left( x_1, x_2, Z_w \right) \\
\vec{X_3} & = & w^3 \left( x_1, x_2, x_3, Z_w \right) \\
\vec{X_4} & = & w^4 \left( x_1, x_2, x_3, x_4, Z_w \right) \\
& & \cdots \\
\end{eqnarray}
になりますが、自由度が n 次元の単位ベクトル $\vec{u_n}$ を $w^n$ 倍したもの
\begin{eqnarray}
\vec{u_n} & = & \left( x_1, x_2, x_3, \cdots, x_n, Z_w \right) \\
\| \vec{u_n} \| & = & 1 \\
\vec{X_n} & = & w^n \vec{u_n} \\
\end{eqnarray}
とします。すると、$\vec{C_n}\ ,\ \vec{T_n}\ ,\ \vec{X_n}$ の関係は
\begin{eqnarray}
\vec{C_n} & = & \vec{T_n} + \vec{X_n} \\
\vec{C_n^*} & = & \vec{T_n} - \vec{X_n} \\
\vec{T_n} & = & \frac{ \vec{C_n} + \vec{C_n^*} }{2} \\
\vec{X_n} & = & \frac{ \vec{C_n} - \vec{C_n^*} }{2} \\
\vec{T_n} \cdot \vec{X_n} & = & 0 \\
\vec{C_n} \cdot \vec{C_n^*} & = & 0 \\
光速度 & = & \frac{ \| \vec{X_1} \| }{ \| \vec{T_1} \| }
= \frac{ \| \vec{X_2} \| }{ \| \vec{T_2} \| }
= \frac{ \| \vec{X_3} \| }{ \| \vec{T_3} \| }
= \frac{ \| \vec{X_4} \| }{ \| \vec{T_4} \| }
= \cdots \\
\vec{T_n} & = & \vec{C_{n+1}} \\
\end{eqnarray}
となり、時間軸 $\vec{T_n}$ は、空間の次元数が1つ多い視点で見ると光速度 $\vec{C_{n+1}}$ に見えます。
ここで想像に難くないのは、空間を持たない $\left( \vec{T_0} = \vec{C_1} \right)$ における性質が根源となって、四次元時空 $\left( \vec{T_3} と \vec{X_3} \right)$ がでてくるには、何らかの工程が三段階ありそうなことです。
また、$\left( n + 1 \right)$ 次元時空は、$\vec{C_n}$ と $\vec{C_n^*}$ を対とする、2個の $n$ 次元時空で表現可能なようです。単純に考えると、四次元時空は $\left( 2^3 + 1 = 9 \right)$ 次元で表現可能ということになりますが...
時間軸を最初の成分にする
$\vec{T_0}$ を回転して
\begin{eqnarray}
\vec{T_0} & = & \left( 1, 0, 0, 0, 0, \cdots \right) \\
\| \vec{T_0} \| & = & 1 \\
\end{eqnarray}
とします。これに対し、$\vec{C_1},\vec{C_1^*}$ を
\begin{eqnarray}
w & = & \frac{1}{ \sqrt{2} } = \cos{45^\circ} = \sin{45^\circ} \\
\vec{C_1} & = & w^1 \left( 1, +1, 0, 0, 0, \cdots \right) \\
\vec{C_1^*} & = & w^1 \left( 1, -1, 0, 0, 0, \cdots \right) \\
\end{eqnarray}
とすることができます。これらから $\vec{T_1},\vec{X_1}$ は、空間方向を示すベクトル $\vec{u_1}$ を
\begin{eqnarray}
\vec{u_1} & = & \left( 0, 1, 0, 0, 0, \cdots \right) \\
\left| \vec{u_1} \right| & = & 1 \\
\end{eqnarray}
として
\begin{eqnarray}
\vec{T_1} & = & \frac{ \vec{C_1} + \vec{C_1^*} }{2} = w^1 \left( 1, 0, 0, 0, 0, \cdots \right) \\
\vec{X_1} & = & \frac{ \vec{C_1} - \vec{C_1^*} }{2} = w^1 \left( 0, 1, 0, 0, 0, \cdots \right) = w^1 \vec{u_1} \\
\end{eqnarray}
になります。$\vec{T_1}$ に対する $\vec{C_2},\vec{C_2^*}$ は
\begin{eqnarray}
\vec{u_2} & = & \left( 0, x_1, x_2, 0, 0, \cdots \right) \\
\left| \vec{u_2} \right| & = & 1 \\
\\
\vec{T_2} & = & w^2 \left( 1, 0, 0, 0, 0, \cdots \right) \\
\vec{X_2} & = & w^2 \left( 0, x_1, x_2, 0, 0, \cdots \right) = w^2 \vec{u_2} \\
\vec{C_2} & = & \vec{T_2} + \vec{X_2} = w^2 \left( 1, +x_1, +x_2, 0, 0, \cdots \right) \\
\vec{C_2^*} & = & \vec{T_2} - \vec{X_2} = w^2 \left( 1, -x_1, -x_2, 0, 0, \cdots \right) \\
\end{eqnarray}
とすることができます。$\vec{C_n},\vec{C_n^*}$ の $n=3$ 以降も同様に
\begin{eqnarray}
\vec{u_n} & = & \left( 0, x_1, x_2, \cdots, x_n, 0, 0, \cdots \right) \\
\left| \vec{u_n} \right| & = & 1 \\
\\
\vec{T_n} & = & w^n \left( 1, 0, 0, 0, 0, \cdots \right) \\
\vec{X_n} & = & w^n \left( 0, x_1, x_2, \cdots, x_n, 0, 0, \cdots \right) = w^n \vec{u_n} \\
\vec{C_n} & = & \vec{T_n} + \vec{X_n} = w^n \left( 1, +x_1, +x_2, \cdots, +x_n, 0, 0, \cdots \right) \\
\vec{C_n^*} & = & \vec{T_n} - \vec{X_n} = w^n \left( 1, -x_1, -x_2, \cdots, -x_n, 0, 0, \cdots \right) \\
\end{eqnarray}
になります。($n$ 元数らしき形式が見えますが...)
$\left( m \lt n \right)$ として、$\vec{T_n}$ の視点で見た $\vec{C_m}$ は $\vec{C_n}$ の一種を $w^{m-n+1}$ 倍したもの(時間と空間の比は $1:1$ のまま)だから、光速度に見えることになります。
$n$ を増やしていって $n \to \infty$ とすると
\begin{eqnarray}
\vec{T_{\infty}} & = & w^{\infty} \left( 1, 0, 0, 0, 0, \cdots \right) \\
\vec{X_{\infty}} & = & w^{\infty} \left( 0, x_1, x_2, \cdots, x_{\infty} \right) \\
\end{eqnarray}
となり、どんなに空間の次元数が増えても、時間的変化がある限り、空間内は活動的に見えることになります。
無限時空
進行方向 $\vec{T_n}$ が、高次空間では光速度 $\vec{C_{n+1}}$ になる無限次元空間を「無限時空」と呼ぶことにします。
$\vec{T_n}$ と $\vec{X_n}$ の表現が二種類になったので区別するときは
\begin{eqnarray}
\vec{T_{w:n}} & = & w^n \left( 0_1, 0_2, \cdots, 0_n, w^1, w^2, \cdots \right) \\
\vec{X_{w:n}} & = & w^n \left( x_1, x_2, \cdots, x_n, 0, 0, \cdots \right) \\
\\
\vec{T_{s:n}} & = & w^n \left( 1, 0, 0, 0, 0, \cdots \right) \\
\vec{X_{s:n}} & = & w^n \left( 0, x_1, x_2, \cdots, x_n, 0, 0, \cdots \right) \\
\end{eqnarray}
とします。
観測者
観測者は、無限時空の座標 $P$ のところに、時間の進行方向 $\vec{T_n}$ と見える空間($\vec{X_n}$ の全方向)があるものとして考えます。
\begin{eqnarray}
P & = & \left( p_1, p_2, p_3, p_4, \cdots, p_{\infty} \right) \\
\vec{T_n} & = & w^n \left( 0_1, 0_2, 0_3, 0_4, \cdots, 0_n, w^1, w^2, \cdots \right) \\
\vec{X_n} & = & w^n \left( x_1, x_2, x_3, x_4, \cdots, x_n, 0, 0, \cdots \right) \\
\end{eqnarray}
$0_n$ の添字 $n$ は成分の番号です。
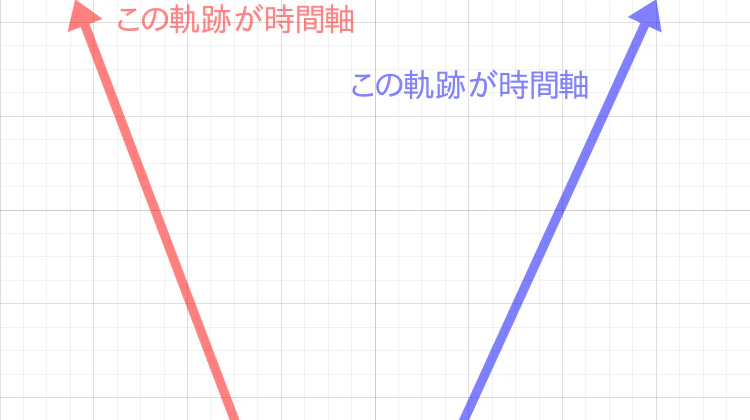
観測者の軌跡は、観測者固有の時間軸
観測者の時間が進むことは、観測者の座標 $P$ が進行方向 $\vec{T_n}$ へ変化することです。変化の連続は、無限時空上の軌跡になります。よって、観測者の軌跡は、観測者固有の時間軸を表すことになります。
観測者固有の空間
観測者の進行方向 $\vec{T_n}$ と空間 $\vec{X_n}$ (の全方向)は対になっています。例外として、$\vec{T_0}$ に対する空間 $\vec{X_0}$ では、観測できる空間がないことになります。
絶対静止座標系
無限時空上での軌跡は「軌跡を描いたモノの歴史」で「固有の時間軸」です。無限時空全体である、時間の経過のない
\begin{eqnarray}
\vec{T} & = & \left( 0, 0, 0, 0, \cdots \right) \\
\| \vec{T} \| & = & 0 \\
\end{eqnarray}
空間のみでは、全ての軌跡が描かれていて、変化しないことになります。全て静止だから、絶対静止座標系でよさそうです。
計算で完全予測しようにも、無限次元空間が相手では、全てを観測し計算することは不可能なので「ラプラスの悪魔」の出番はなさそうです。また、予測が確率的になっても、全てが静止だから「神は賽を振らない」ことになります。
「全て静止」は「未来は確定している」と同じ意味になります。無限時空に限らず、時間軸を定めた空間を作って、軌跡を描いたら「過去・現在・未来」の区分は、現在を何処にするかでしかなくなってしまいます。すると、描いた軌跡は変化しないので「未来は確定している」ことになります。これが、人の行動源となる「未来は未確定で、自身の行動次第」と矛盾するので抵抗感を自動的に覚えます。どうにもならないのだけど、どうしたものかと...
相対速度
無限時空上では、観測者の時間 $\vec{T_n}$ と空間 $\vec{X_n}$ は固有で対になっているので、観測対象は観測者との相対関係になります。二者間で完結するので、二者の「入れ物となる $\left( n+1 \right)$ 次元時空」は不要となり、「入れ物の中における絶対速度」の概念も不要になります。
観測者と観測対象
観測対象は、観測者から見える空間($\vec{X_n}$ の全方向のどこか)にあるもの
観測対象座標 = 観測者座標 + 距離 \times \vec{X_n}
として考えます。(観測者と同時となる、観測対象の座標です)
観測者の時間軸を $\vec{T_s}$ 、観測対象の時間軸を $\vec{T_p}$ とすると、$\left( p \ne s \right)$ の場合、見えない $\left( p \gt s \right)$ か、光速度 $\left( p \lt s \right)$ になってしまうので、$\left( p = s \right)$ とします。すると、$\vec{T_p}$ は $\vec{T_s}$ を回転したものになります。
時間軸の一部が速度になる
観測者の時間軸を
\begin{eqnarray}
\vec{T_s} = \vec{T_1} & = & w^1 \left( 0, T_w \right) \\
& = & w^2 \left( 0, 1, T_w \right) \\
\\
w & = & \frac{1}{ \sqrt{2} } \\
T_w & = & w^1, w^2, w^3, \cdots \\
\end{eqnarray}
とすると、最初の成分が見える空間になります。
観測対象の時間軸 $\vec{T_p}$ は $\vec{T_1}$ を回転し、3番目以降の成分は観測者と同じ
\begin{eqnarray}
\vec{T_p} & = & w^2 \left( x, y, T_w \right) \\
\vec{T_s} & = & w^2 \left( 0, 1, T_w \right) \\
\\
1 & = & x^2 + y^2 \\
\end{eqnarray}
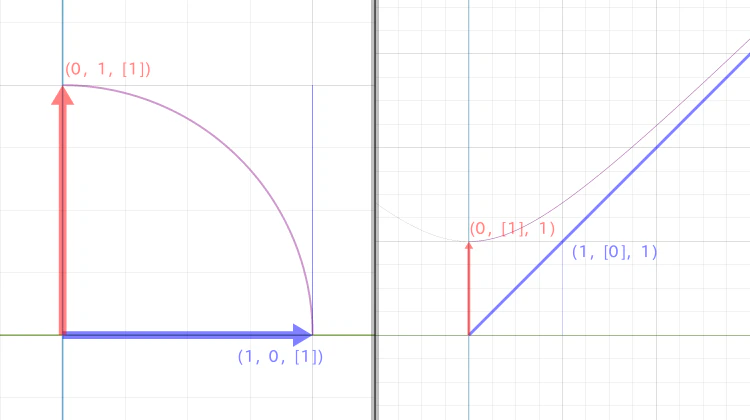
にすると、$x$ は観測者の空間側になります。観測者と観測対象の時間軸の向きの違いを角度 $\theta$ で表して
\begin{eqnarray}
\vec{T_p} & = & w^2 \left( \sin{\theta}, \cos{\theta}, T_w \right) \\
x & = & \sin{\theta} \\
y & = & \cos{\theta} \\
\end{eqnarray}
とします。$\vec{T_2}$ から見た、観測者 $\vec{T_s}$ と観測対象 $\vec{T_p}$ を見ると
\begin{eqnarray}
\vec{T_2} & = & w^2 \left( 0, 0, T_w \right) \\
\vec{T_s} & = & w^2 \left( 0, 1, T_w \right) \\
\vec{T_p} & = & w^2 \left( \sin{\theta}, \cos{\theta}, T_w \right) \\
\end{eqnarray}
となって、観測者と観測対象は、第三者 $\vec{T_2}$ の平面(1番目と2番目の成分)上で光速度になっています。また、$T_w$ は $\vec{T_2}, \vec{T_s}, \vec{T_p}$ で「共通の時間」と考えることができるので、$\vec{T_2}$ の平面上(視点)では $\vec{T_s}$ の1秒経過と $\vec{T_p}$ の1秒経過が同じに見えます。
観測者 $\vec{T_s}$ から見た観測対象 $\vec{T_p}$ は、2番目の成分が異なっています。そこで、2番目の成分で揃えてみると
\begin{eqnarray}
\vec{T_s} & = & w^2 \left( 0, 1, T_w \right) \\
\frac{ \vec{T_p} }{ \cos{\theta} } & = & w^2 \left( \frac{ \sin{\theta} }{ \cos{\theta} }, 1, \frac{ T_w }{ \cos{\theta} } \right) \\
& = & w^2 \left( \tan{\theta}, 1, T_w \cdot \sec{\theta} \right) \\
\end{eqnarray}
になります。これは、観測対象 $\vec{T_p}$ の空間(最初の成分)と「共通の時間」が同じ比率で伸びた $\left( \cos{\theta} \lt 1 \right)$ ように観測者には見えることになります。よって、観測者 $\vec{T_s}$ から見た観測対象 $\vec{T_p}$ の速度は
\frac{ \sin{\theta} }{ \cos{\theta} } \div \frac{ \| T_w \| = 1 }{ \cos{\theta} } = \sin{\theta} = \frac{v}{c} \\
\left( \cos{\theta} = \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } = \frac{1}{\gamma} \right)
です。 相対速度は、観測者と観測対象の時間軸の向きの違いで生じる ことになります。
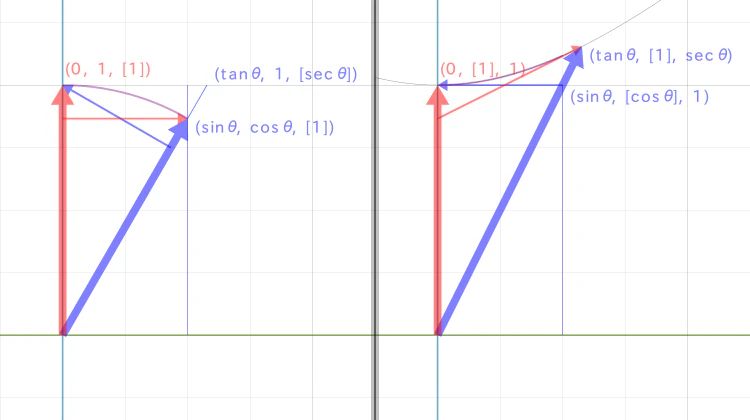
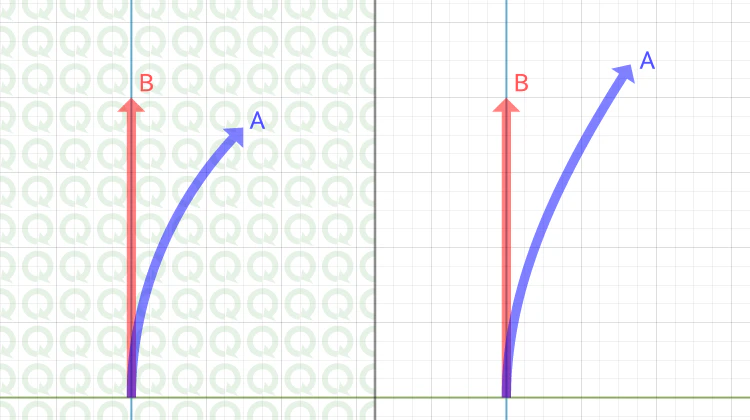
赤と青を、観測者と観測対象とします。図の左側は、第三者の平面上での動きになります。右側は、観測者の時空における観測対象の見え方になります。
観測者と観測対象の両者が、それぞれの固有時間軸に向かって進む様子を、一定速度で並走する車に例えると、進行方向が時間軸で、Y字分岐で遠ざかっていく相手の様子が相対速度です。これが慣性に見えます。時間軸の向きの違いが結果的に相対速度として見えるだけなので、慣性は錯覚になります。
そうなると、慣性質量という概念が要らなくなり、「等価原理」ではなく「等価でした」というオチが予想されます。
三角関数を双曲線関数に置き換える
まず、速度 $\frac{v}{c}$ から
\begin{eqnarray}
\theta_h & = & \tanh^{-1}{ \frac{v}{c} } \\
e^{ \theta_h } & = & \frac{ 1 + \frac{v}{c} }{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } } \\
e^{ -\theta_h } & = & \frac{ 1 - \frac{v}{c} }{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } } \\
\cosh{\theta_h} & = & \frac{ e^{\theta_h} + e^{-\theta_h} }{2} = \frac{ 1 }{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } } \\
\sinh{\theta_h} & = & \frac{ e^{\theta_h} - e^{-\theta_h} }{2} = \frac{ \frac{v}{c} }{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } } \\
\tanh{\theta_h} & = & \frac{v}{c} \\
\end{eqnarray}
が得られます。三角関数を双曲線関数に置き換えると
\begin{eqnarray}
\sin{\theta} & = & \tanh{ \theta_h } = \frac{v}{c} \\
\frac{1}{ \cos{\theta} } & = & \cosh{ \theta_h } = \frac{1}{ \sqrt{1 - \left( \frac{v}{c} \right)^2 } } = \gamma \\
\tan{\theta} & = & \sinh{ \theta_h } = \frac{ \frac{v}{c} }{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } } = \gamma \frac{v}{c} \\
\\
\vec{T_s} & = & w^2 \left( 0, 1, T_w \right) \\
\vec{T_p} & = & \frac{ w^2 }{ \cosh{\theta_h} } \left( \sinh{\theta_h}, 1, T_w \cdot \cosh{\theta_h} \right) \\
\end{eqnarray}
になります。観測者と観測対象を入れ替えるには、$v,\theta,\theta_h$ の符号 $\pm$ を逆に考えるだけなので
\begin{eqnarray}
\vec{T_s} & = & \frac{ w^2 }{ \cosh{\theta_h} } \left( -\sinh{\theta_h}, 1, T_w \cdot \cosh{\theta_h} \right) \\
\vec{T_p} & = & w^2 \left( 0, 1, T_w \right) \\
\end{eqnarray}
とすることができます。双曲線関数の角度 $\theta_h$ での回転はローレンツ変換に相当します。
三角関数と双曲線関数の対応表
| 三角関数 | 双曲線関数 | |
|---|---|---|
| $\frac{v}{c}$ | $\sin{\theta}$ | $\tanh{\theta_h}$ |
| $\gamma = \frac{1}{ \sqrt{ 1 - \left( \frac{v}{c} \right)^2 } }$ | $\sec{\theta} = \frac{1}{\cos{\theta}}$ | $\cosh{\theta_h}$ |
| $\frac{1}{\gamma} = \sqrt{ 1 - \left( \frac{v}{c} \right)^2 }$ | $\cos{\theta}$ | $sech\ \theta_h = \frac{1}{\cosh{\theta_h}}$ |
| $\gamma \frac{v}{c}$ | $\tan{\theta}$ | $\sinh{\theta_h}$ |
| $\tan{\frac{\theta}{2}}$ | $\tanh{\frac{\theta_h}{2}}$ |
光速度は超えられない
相対速度は、時間軸の向きの違いで生じるので
\begin{eqnarray}
\sin{\theta} & = & \frac{v}{c} \\
\| \sin{\theta} \| & \le & 1 \\
\| \frac{v}{c} \| & \le & 1 \\
\| v \| & \le & c \\
\end{eqnarray}
となって、光速度を超えられないことになります。
観測者と観測対象を、一つ次元が上の第三者から見たときの進行方向の角度差 $\theta$ が $\pm 90^\circ$ で、相対速度が最大です。
$|\theta| \gt 90^\circ$ となると、お互いの固有空間に現れなくなるので、事象の地平の向こう側にある状態(ブラックホールの中に限らず、飛び去って見えない遠方銀河も同様)と考えられます。個々に固有空間を持つということは、全てが1つに閉じ込められたような世界ではないことになります。
波動と粒子の二重性?
観測者 $\vec{T_s}$ と観測対象 $\vec{T_p}$ を、第三者 $\vec{T_2}$ でみると
\begin{eqnarray}
\vec{T_s} & = & w^2 \left( 0, 1, T_w \right) = \vec{C_2} \\
\vec{T_p} & = & w^2 \left( \sin{\theta}, \cos{\theta}, T_w \right) \\
\vec{T_2} & = & w^2 \left( 0, 0, T_w \right) \\
\\
\| \vec{T_1} \| & = & \| \vec{T_s} \| = \| \vec{T_p} \| \\
\end{eqnarray}
観測者と観測対象は光速度になっていました。第三者視点では、観測者と観測対象は、速度一定で進み続けることになります。これは「光」と同様な「波」と同じ性質を示すと考えられます。一方、観測者と観測対象の関係は「粒子」の様な性質になると考えられます。同じものが、波と粒の両方の性質を示すことになりそうです。
観測者と観測対象の関係を $\vec{T_n}$ の世界とすると、第三者視点は $\vec{T_m}$ で $\left( m \gt n \right)$ の世界で同様になります。
加速
相対速度が $\left( \sin{\theta} = \frac{v}{c} \right)$ として固有時間軸の向きの違いで表されるのであれば、違いを表す $\theta$ が変化すると、相対速度が変化します。相対速度の変化は加速に見えます。
座標ごとに回転量がある
固有時間軸が向きを変えるとき、「向きを変える場所(無限時空上の座標)」には「進入方向と脱出方向の差」となる「向きを変える大きさ=回転量」があることになります。これは進入方向には依存しないものと考えられます。
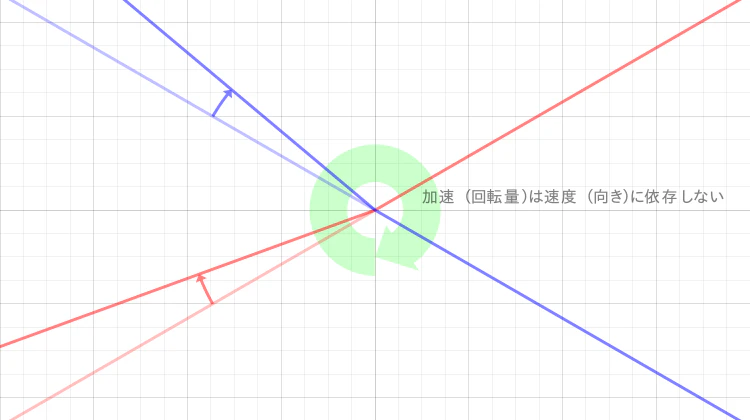
この図では、軌跡を順行するときと逆行するときで回転方向が逆になってしまいます。しかし、「軌跡の逆行」が「時間の逆行」ならば逆回転になると考えられます。
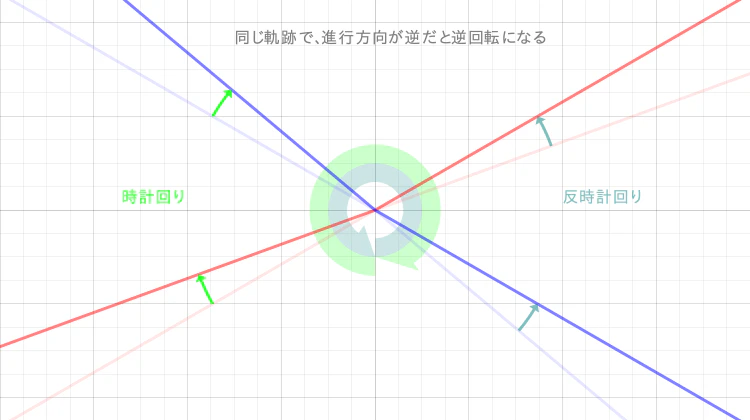
無限時空上の軌跡に対し、順行か逆行かで、回転量に対する回転方向か逆になると考えられます。これは、進行方向に対して「正(+)の加速」になるものと「負(-)の加速」になるものがある、と考えることができそうです。
とりあえず、軌跡の逆行はややこしくなるので、一旦忘れることにします。
各座標ごとに回転量があることで「無限時空上の軌跡は曲線を描く」ことになります。二つの軌跡(二者)が同じ座標を通るとき、進入方向が違うと脱出方向が異なります。これは、回転量が有限ならば「二つの軌跡は統合されない=情報が失われない」ことを意味します。
等加速度運動
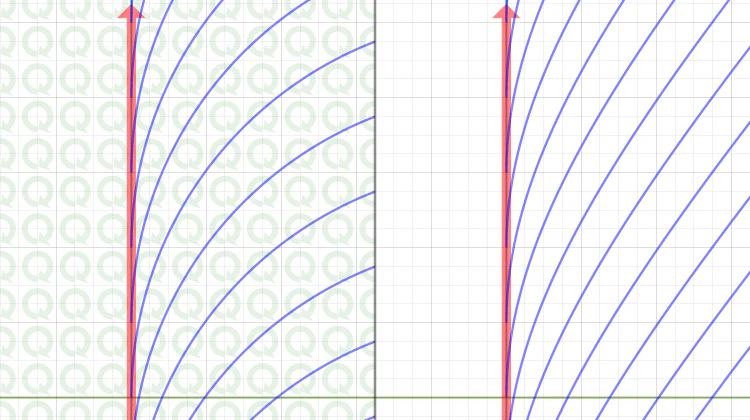
無限時空上のある領域に均一な回転量がある場合を考えます。
図の左側は、第三者の平面上での観測者 $B$ は回転量に負けず直進するものとし、観測対象 $A$ は向きを変えながら旋回運動になっています。軌跡の長さは $A,B$ ともに「経験する時間」が同じです。図の右側は、観測者 $B$ の時空における観測対象 $A$ の見え方になります。観測者 $B$ には、観測対象 $A$ が加速しながら右へ移動していくように見えます。回転量は、単位時間あたりの角度を $a$ として、経過時間を $t$ すると、観測対象 $A$ の進行方向 $\vec{A}$ は
\vec{A} = \left( \sin{a t}, \cos{a t}, t \right)
として変化するので、$A$ の座標は
\begin{eqnarray}
\int_0^t \sin{a t} \ dt & = & \frac{1 - \cos{a t} }{a} \\
\int_0^t \cos{a t} \ dt & = & \frac{ \sin{a t} }{a} \\
A & = & w^2 \left( \frac{1 - \cos{a t} }{a}, \frac{ \sin{a t} }{a}, t \cdot T_w \right) \\
\end{eqnarray}
$B$ の座標は直進なので
\begin{eqnarray}
B & = & w^2 \left( 0,t,t \cdot T_w \right) \\
\end{eqnarray}
になります。$B$ から見た $A$ は、2番目の成分を揃えて
\begin{eqnarray}
A \frac{a t}{ \sin{a t} } & = & w^2 \left( t \cdot \tan{ \frac{a t}{2} }, t, \frac{a t^2}{ \sin{a t} } \cdot T_w \right) \\
\end{eqnarray}
これが、図の右側の $A$ の軌跡になっています。回転量 $a$ が十分に小さいと
\begin{eqnarray}
\tan{ \frac{a t}{2} } & \fallingdotseq & \frac{a t}{2} \\
\frac{ \sin{a t} }{a t} & \fallingdotseq & 1 \\
\end{eqnarray}
として近似できるので、$B$ から見た $A$ の軌跡は
\begin{eqnarray}
A & \approx & w^2 \left( \frac{a t^2}{2}, t, t \cdot T_w \right) \\
\end{eqnarray}
等加速度運動に見えることになります。
時空の歪み
$A$ の軌跡を $B$ から定期的に出るとしたもの
を横倒しにして、GIF動画(これも図と表現)にすると以下になります。
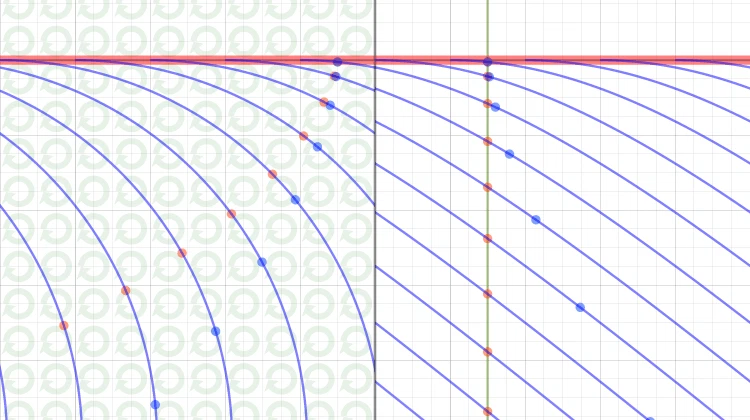
赤の点は、$B$ には同時として見えます。図の右側では、時刻が $B$ と同じ位置にあります。
青の点と $B$ は「経験する時間」が同じ速さです。図の左側(第三者視点)では、$B$ と青の点の移動速度は同じです。
赤の点と青の点の位置の開きは、赤の点は、青の点に対して時間がゆっくり進むことを意味します。
図の右側では、下にある赤の点ほど、青の点が右方向(時間)と下方向(空間)にあり、時間と空間が引き伸ばされたように見えます。
$B$ から見た赤い点は、相対速度が光速度に近づくほど、時間の進み方(図左での移動)が徐々に遅くなり、回転量(図左での向きの変化)も減っていくので、加速が減少します。しかし、相対速度は増え続けるので、図の右側では、時空の引き伸ばしが大きくなっていきます。相対速度の増加の極限としての光速度では、時空の引き伸ばしが無限大に見えるので、光速度を超えることはありません。
個々の青の点は、無限時空上(図左)では、向きを変えながら進んでいるだけですが、$B$ の視点(図右)では、時空の歪みに見えることになります。
図の左側では、$B$ と青い点が光速度で移動しているので、$\left(2+1=3\right)$ 次元時空の一般相対性理論が適用できそうです。図の右側も $\left(1+1=2\right)$ 次元時空の一般相対性理論が適用できそうです。よって、空間の次元数を1つ増やすと、増やす前の時空の曲がり具合が空間に現れそうです。
また、四次元時空での四元速度における時間のパラメータ
\begin{eqnarray}
\frac{ dx^0 }{ d\tau } & = & c \gamma \\
\end{eqnarray}
は、$\vec{T_4}$ の世界から見た $\vec{T_3}$ は光速度なので
\begin{eqnarray}
\frac{ dx^0 }{ d\tau } & \rightarrow & \gamma \frac{ dx^0 }{ dt } \\
dx^0 & \rightarrow & \vec{T_3} \\
dt & \rightarrow & \vec{T_4} \\
d\tau & \rightarrow & \cos \theta = \gamma^{-1} \\
\end{eqnarray}
のように考えることができます。
(無限時空の回転量と空間曲率を一致する式を作りたいところですが、私はあの式を扱う訓練が圧倒的に足りていない、いや、それ以前のレベルなのが問題です。慣れた人なら、あっさりと何か出せると思いますが...)
加速の種類
観測者 $B$ と観測対象 $A$ の時間軸を、三次元空間と時間の四次元時空では
\begin{eqnarray}
\vec{A_3} & = & w^4 \left( A_x, A_y, A_z, A_t, T_w \right) \\
\vec{B_3} & = & w^4 \left( 0, 0, 0, 1, T_w \right) \\
\end{eqnarray}
とすると、B を加速して A にするための回転角 $\theta_3$ を使って
\begin{eqnarray}
Z_w & = & 0, 0, 0, \cdots \\
\vec{T_3} & = & w^4 \left( 0, 0, 0, 1, T_w \right) \\
\vec{T_4} & = & w^4 \left( 0, 0, 0, 0, T_w \right) \\
\vec{Q_3} & = & w^4 \left( 0, 0, 0, 1, Z_w \right) = \vec{T_3} - \vec{T_4} \\
\vec{u_3} & = & \left( x_1, x_2, x_3, 0, Z_w \right)\ ,\ \left| \vec{u_3} \right| = 1 \\
(A_x, A_y, A_z) & = & \sin{\theta_3} \left( x_1, x_2, x_3 \right) \\
A_t & = & \cos{\theta_3} \\
\left| (A_x, A_y, A_z, A_t) \right| & = & 1 \\
\\
\vec{A_3} & = & w^4 \sin{\theta_3} \cdot \vec{u_3} + \cos{\theta_3} \cdot \vec{Q_3} + \vec{T_4} \\
\end{eqnarray}
と表せます。これは、空間中の1軸 $\left( x_1, x_2, x_3, 0 \right)$ と固有時間軸 $\left(0, 0, 0, 1 \right)$ の2軸(4軸中)で構成される平面上での回転です。二次元空間と時間の三次元時空では
\begin{eqnarray}
\vec{B_2} & = & w^3 \left( 0, 0, 1, T_w \right) \\
\vec{A_2} & = & w^3 \left( A_x, A_y, A_z, T_w \right) \\
& = & w^3 \sin{\theta_2} \cdot \vec{u_2} + \cos{\theta_2} \cdot \vec{Q_2} + \vec{T_3} \\
\end{eqnarray}
と表せます。これは、四次元時空から見たとき、三次元空間にある2軸(3軸中)で構成される平面上での回転です。
ここで、$\theta_2$ も $\theta_3$ と同じ固有時間軸を使い、三次元空間との四次元時空での回転を考えます。
$\theta_3$ では4軸中2軸の回転で、1軸が三次元空間のあらゆる方向(3軸分の自由度)で加速できると考えることができます。
しかし、$\theta_2$ の回転では、三次元空間のうち「2軸分の自由度」なので、平面方向に加速が制限されます。失われる自由度は、平面の法線になると考えられます。これは、磁場で曲げられる電子ビーム(身近な?!製品では、小型粒子加速器を搭載した、ブラウン管テレビ)と同じことになります。観測者から見た電子の運動の方向が平面の法線に相当します。
$\theta_3$ の回転は重力のような全方向の加速(直線的加速)に見え、$\theta_2$ の回転は電磁力のような旋回加速に見えると考えられます。また、$\vec{B_3}$ から見た $\vec{A_3}$ の回転は「速度($\theta_3$に)変化のある加速」と「速度($\theta_3$に)変化のない旋回運動」の二種類になりますが、五次元時空 $\vec{T_4}$ から見た $\vec{A_3}$ の回転は両者を区別せず、どちらも同じものに見えます。
最後に $\theta_1$ の回転は、一次元空間と時間の二次元時空であり、三次元空間のうち「1軸分の自由度」としてみます。ここで簡単に想定できることは、往復運動が、二次元時空の回転に置き換えられることです。三次元時空では、二軸の往復運動、四次元時空では、三軸の往復運動が考えられます。
宇宙の始まり
情報が保存されるのであれば、多数の軌跡が一カ所に集中しても統合されて消滅することはないので、集中後に放射状に分散する状況を考えることができます。
分かり易い例(?)として、超新星爆発の五次元時空版を想像します。爆発寸前では、粒子に対応する多数の軌跡が一カ所に集中した状態と言えます。爆発で一カ所から光が放射される状況は、$\vec{T_4}$ の世界にて $\vec{T_3}$ の世界が創造されたかのような状況になります。これは爆発の瞬間が四次元時空に見える宇宙の始まりと考えることができるでしょう。
すると、軌跡の集中する場所は、一カ所であれば「点」でなく、かなり大きくてもよいことになります。
こちらの記事の作り直し中です。どんどん編集する予定。