ArduPilotのシミュレーション(SITL + FlightGear)で6発機(ヘキサコプター)に対応してみたら、闇が深かったのでメモです。
Macで、ArduPilotのシミュレーション(SITL + FlightGear)をするには、以下を見て下さい。
https://qiita.com/ikeyasu/items/9d244bcd0dd9b776ff84
上記で、
$ cd ardupilot/Tools/autotest
$ ./sim_vehicle.py -v ArduCopter -L KSFO --map --console
とすると、SITLのシミュレーションが実行できますが、./sim_vehicle.pyに--frame hexa を加えると、モーターが6つのドローンになります。
$ cd ardupilot/Tools/autotest
$ ./sim_vehicle.py -v ArduCopter -L KSFO --frame hexa --map --console
ヘキサコプターのシミュレーション自体は、上記の変更だけでできるのですが、見た目が変わりません。
本記事は、単に見た目を変えるための話になります。
最初に、ヘキサコプターというのは以下のようにモーターが6つあるものです。

※ 画像の作者:Alexander Glinz、画像のライセンス
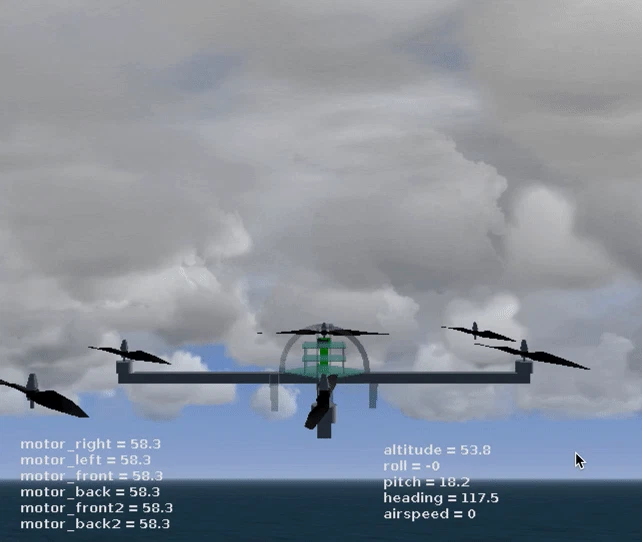
FlightGear で表示すると以下のように、4つのモーター(クアッドコプター)になります。これをヘキサコプターにしてみます。

まずは、FlightGear の見た目だけの話なので、FlightGearで読み込んでいるモデルを変更でできるのかと思いました。
Tools/autotest/fg_quad_view.shを見てみると、Tools/autotest/aircraftの中の、arducopterというディレクトリの中のモデルを見ているようです。
# !/bin/sh
AUTOTESTDIR=$(dirname $0)
nice fgfs \
--native-fdm=socket,in,10,,5503,udp \
--fdm=external \
--aircraft=arducopter \
--fg-aircraft="$AUTOTESTDIR/aircraft" \
--airport=YKRY \
--geometry=650x550 \
--bpp=32 \
--disable-anti-alias-hud \
--disable-hud-3d \
--disable-horizon-effect \
--timeofday=noon \
--disable-sound \
--disable-fullscreen \
--disable-random-objects \
--disable-ai-models \
--fog-disable \
--disable-specular-highlight \
--disable-anti-alias-hud \
--wind=0@0 \
$*
また、こちらのドキュメントにあるとおり、aircraftの名前と-set.xmlのファイル名が読み込まれるようです。今回は、arducopter-set.xmlになります。
とりあえず、ここにあるenginesは6つにします。
つぎに、モデル自体は、Aircraft/arducopter/Models/arducopter.xmlを読み込んでいるようです。
このファイルには、以下のようなものが並んでいますが、これがプロペラを回しています
<!--Propeller Front-->
<animation>
<type>noshadow</type>
<object-name>propeller2</object-name>
</animation>
<animation>
<type>spin</type>
<object-name>propeller2</object-name>
<property>engines/engine[2]/rpm</property>
<factor>100</factor>
<axis>
<x1-m>0.288</x1-m>
<y1-m>0.000</y1-m>
<z1-m>0.046</z1-m>
<x2-m>0.288</x2-m>
<y2-m>0.000</y2-m>
<z2-m>0.012</z2-m>
</axis>
</animation>
重要な点は3つで
-
object-nameは、AC3Dという3Dモデリングソフトで作成したファイル quadcopter.ac のオブジェクト名 -
propertyは、Flight Gear のProperty Tree。使えるプロパティはこちらから見られる -
axisは、AC3Dのプロペラの中心座標
とりあえず、AC3Dをダウンロードして、インストールします。
プロペラを適等に2つ増やします。
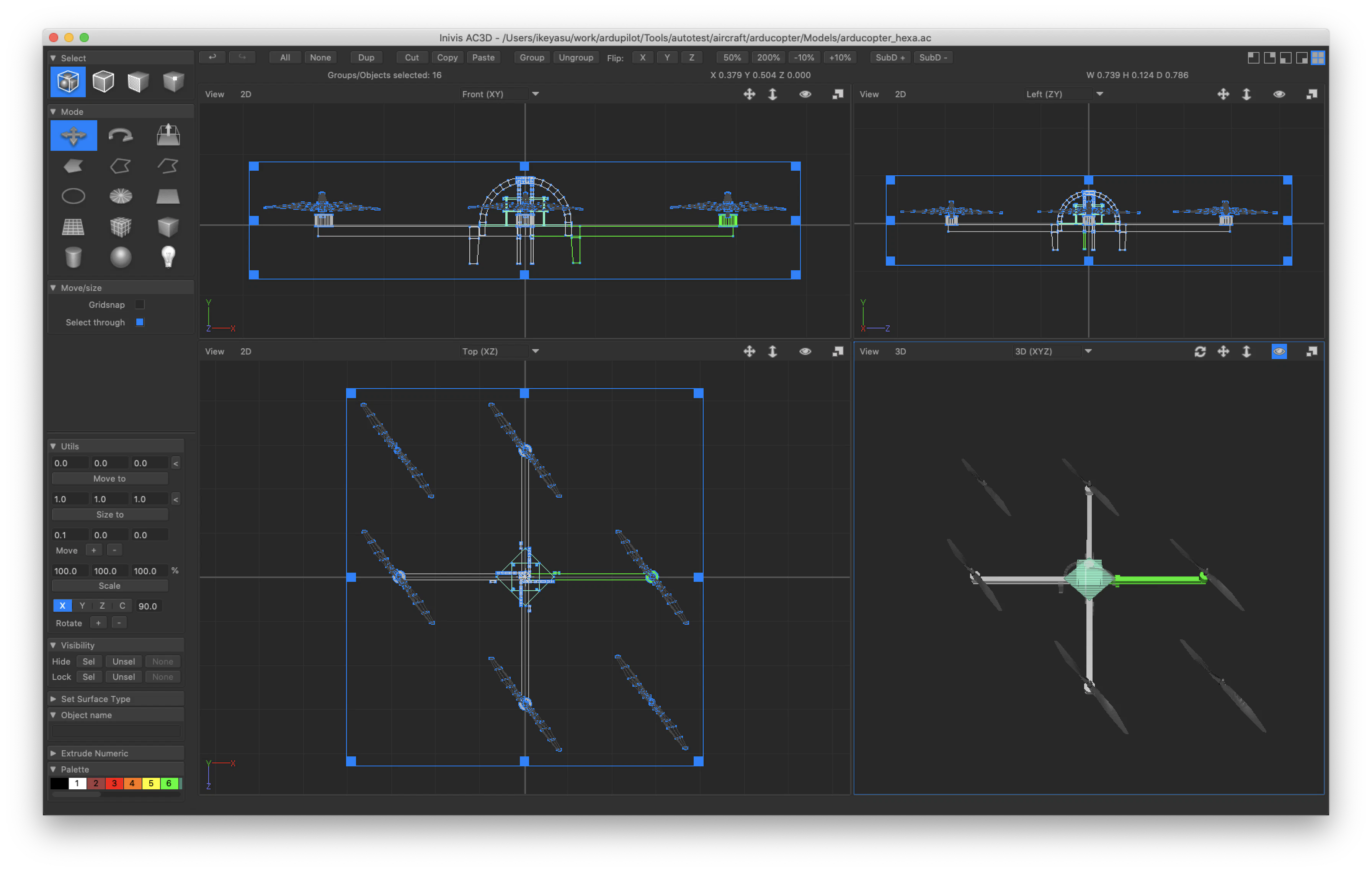
そして、aruducopter.xmlをコピーして、arducopter_hexa.xmlを作成し、プロペラを2つ加えました。
さて、加えたpropeller4とpropeller5のpropertyを何にするかですが、engines/engine[4]/rpmでは動きません。これが、今回の闇です。
engines/engine[4]/rpmは、nilになり、つかえないようです。そもそも、書き込まれていないのではという事で、SITL側を調べます。
ArduPilotのSITLのアーキテクチャは以下です。(こちらに掲載されています)
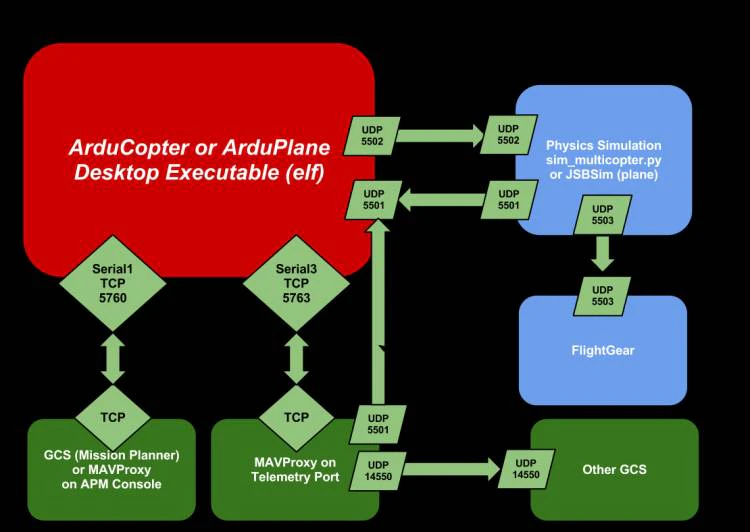
※ 画像のタイトル:SITL Simulator、画像のライセンス
困ったことに、この図は微妙に実際と違いました。おそらく、古いのかと思います。JSBSimを使う場合は、正しいのですが、上記のコマンドでは、JSBSimは使いません。sim_multicopter.pyの方と思うのですが、そんなソースは今はありません。
調べてみると、ここからflightgearに送っているようです。つまり、ArduCopterのバイナリー内に、SITLの仕組みが内包されてようです。
そこでコードを見てみると、以下のように4つしか送っていません。
if (_vehicle == ArduCopter) {
fdm.num_engines = 4;
for (uint8_t i=0; i<4; i++) {
fdm.rpm[i] = constrain_float((pwm_output[i]-1000), 0, 1000);
}
}
では、これを6にしよう、と思ったのですが、それは動きませんでした。
FlightGear への送信は、こちらの構造体のバイナリを送っているようなのですが、これが4つのモーターしか対応していません。
治すには、FlightGear側も修正が必要で面倒なので、こちらからつかって無さそうなfuel-flow-gphプロパティを使うことにしました。
こちらの通り、モーターの数が、6つの場合に、のこり2つは、fuel_flowに入れています。
fdm.num_engines = 4;
for (uint8_t i=0; i<4; i++) {
fdm.rpm[i] = constrain_float((pwm_output[i]-1000), 0, 1000);
}
if (sitl_model->get_num_motors() == 6) {
for (uint8_t i=0; i<2; i++) {
fdm.fuel_flow[i] = constrain_float((pwm_output[i]-1000), 0, 1000);
}
}
その他、モーターの回転数表示も修正しています。
https://github.com/ikeyasu/ardupilot/commit/45482ca70c8088fa11bb8bfc09c823f7e07dba6e
というわけで、以下のようにすれば、6発のモーターが回るようになりました。
$ cd ardupilot
$ git remote add ikeyasu https://github.com/ikeyasu/ardupilot.git
$ git fetch ikeyasu
$ git checkout -b hexa ikeyasu/hexa
$ cd Tools/autotest
$ ./sim_vehicle.py -v ArduCopter -L KSFO --frame hexa --map --console
以下、別のTerminalで、
$ cd ardupilot/Tools/autotest
$ ./fg_hexa_view.sh
あまりに不格好なので、AC3Dで好みのデザインに修正してみて下さい。