参考にしたページ
Ryze Tech. の Tello を M5Stackで動かす方法のベースになっているのは,以下のページです.
参考URL:TelloをM5Stack Grayでコントロールするスケッチを作りました
当該ページのプログラムを応用することで,
M5stack(あるいはESP32)を使って,Telloを様々に動かすことが可能になります.
はじめに
M5Stackの加速度センサーを使ってTelloを操縦する方法は,上記のサイトを利用すれば可能です.
また,Tello SDKのrcコマンドを使うことで,ラジコン操作のようなスムーズな動きも可能になります.
rcコマンドを利用して,これまで以下の記事を書きました.
本ページでは,M5StackのGloveコネクタに「Wiiヌンチャク」を接続して,
M5stackとWiiヌンチャクで動的に操縦できるように
します.
具体的には,以下の動画の様に動かせるようになります.
M5stackのgrove i2cポートにWiiヌンチャクを接続し、Telloをコントロールしています。pic.twitter.com/FqkguKACl2
— hsgucci404 (@hsgucci404) February 20, 2020
概要
Wiiヌンチャクやクラシックコントローラ等のアクセサリは,ケーブルを介してI2Cで「Wiiリモコン」本体へと繋がっています.
したがって,ArduinoのI2Cプログラム(Wire.h関連)を書くことで,スティックやボタンのデータを取り出すことができます.
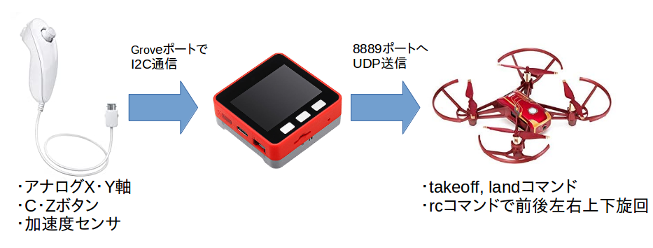
M5Stackは,USB Type-Cコネクタの隣に,赤いGroveポート(ポートA)があり,I2Cの端子が来ています.
今回は,ポートAにWiiヌンチャクを接続し,Telloを動かします.
具体的なシステム構成は以下の様になります.
Wiiヌンチャクの利用
WiiヌンチャクをM5Stackで使用するにあたって,ハード・ソフトの両面で以下の問題を解決しなければなりません.
- ハードウェア:Groveコネクタに変更する
- ソフトウェア:ArduinoでWiiヌンチャクとI2C通信する
以下,それぞれ解説していきます.
ハードウェア
Wiiリモコンへと接続するためのコネクタは,任天堂の特別製です.
Arduinoで工作をする人達は『WiiChuckアダプタ』を使うことが多いのですが,
プリント基板を差し込むだけだと,コネクタが抜けてしまうのがちょっと心配です.
今回は,コネクタを切り離して,直接ハンダ付けしました.
(というか,元々Arduino Nanoやmbedで使うために切ってあったので,それを流用しました)
切断したWiiリモコンのケーブル色に関しては,以下が参考になります.
参考URL: ヌンチャクをマウスにしてみよう(ヌンチャク型コントローラ・ミーツ・Digispark)
また,M5StackのGroveポートAに関しては,以下が参考になります.
参考URL: IoT何をいまさら(34) M5StackのGroveコネクタ
Seeed Studioの提唱する「Groveシステム」では,特別なコネクタと配色の決まったケーブルを利用します.
以下の製品などを購入して切断すると良いでしょう.(筆者は余っていたGroveケーブルを使いました)
M5Stack用GROVE互換ケーブル 10 cm(5個入り)
上記のページを参考にした結果をまとめると,
| ピンの役割 | Wiiヌンチャク | Groveケーブル |
|---|---|---|
| 5V | 赤 | 赤 |
| GND | 白 | 黒 |
| SCL | 黄 | 黄 |
| SDA | 緑 | 白 |
| となります. | ||
| 実際に配線すると,こんな風になります. | ||
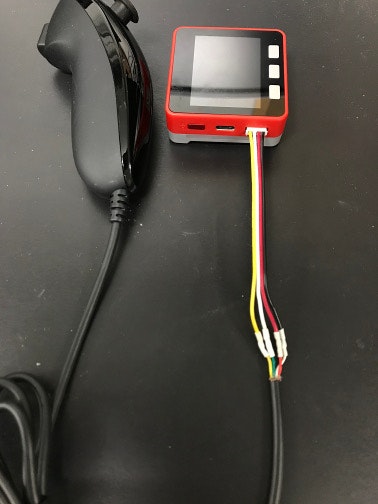 |
配線の処理はわずかこれだけです.
本来はSCL,SDAのラインにプルアップ抵抗を入れるべきですが,それも省略してしまいました(^^;;
ソフトウェア
Wiiヌンチャクのボタンデータを取得するにはI2C通信を使う必要があるのですが,フルスクラッチで書いたら大変です.
Arduinoで簡単に使える有名なライブラリがあります.
(前述の 変換基板 は,このライブラリを使う前提で命名されています)
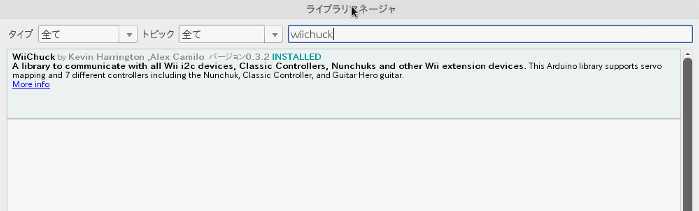
WiiChuckのインストールの方法は,
Arduino IDEのメニューバー[スケッチ]-[ライブラリをインクルード]-[ライブラリを管理...]
で出てくるライブラリマネージャの検索バーで wiichuck と打って検索しましょう.
WiiChuckを見つけたら,[インストール]ボタンをクリックするだけです.
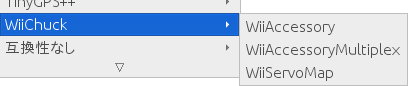
使い方は,メニューバー[ファイル]-[スケッチ例]-[WiiChuck]にサンプルがあります.
スケッチ
M5stackに書き込むスケッチは,以下の様になります.
以下のコードをコピー&ペーストするか,
ここ を右クリックして[名前を付けて保存]機能でファイル保存してください.
# define LOAD_FONT2
# define LOAD_FONT4
# include <M5Stack.h>
# include <WiiChuck.h>
# include <WiFi.h>
# include <WiFiUdp.h>
// TELLOのSSID
const char* TELLO_SSID = "TELLO-XXXXXX"; // 自分のTelloのWi-Fi SSIDを入力
// TELLOのIP
const char* TELLO_IP = "192.168.10.1";
// TELLO_PORT
const int PORT = 8889;
// UDPまわり
WiFiUDP Udp;
char packetBuffer[255];
String message = "";
float ail,ele,thr,rud;
char msg_jx[6];
char msg_jy[6];
char msg_ax[6];
char msg_ay[6];
String status_msg;
char command_str[20];
Accessory nunchuck1;
void setup() {
//M5Stackの初期設定
M5.begin();
//画面表示
//---タイトル
M5.Lcd.fillRect(0,0,320,30,TFT_BLUE);
M5.Lcd.drawCentreString("Tello Controller",160,2,4);
//---ジョイスティックXの表示
M5.Lcd.setTextColor(TFT_YELLOW,TFT_BLACK);
M5.Lcd.drawCentreString(" Joy-X : ",20,30,2);
sprintf(msg_jx,"%-2.2f",ail);
M5.Lcd.drawCentreString(msg_jx,88,30,2);
//---ジョイスティックYの表示
M5.Lcd.drawCentreString(" Joy-Y : ",240,30,2);
sprintf(msg_jy,"%-2.2f",ele);
M5.Lcd.drawCentreString(msg_jy,294,30,2);
//---加速度Xの表示
M5.Lcd.drawCentreString(" Accel-X : ",20,50,2);
sprintf(msg_ax,"%-2.2f",rud);
M5.Lcd.drawCentreString(msg_ax,88,50,2);
//---加速度Yの表示
M5.Lcd.drawCentreString(" Accel-Y : ",240,50,2);
sprintf(msg_ay,"%-2.2f",thr);
M5.Lcd.drawCentreString(msg_ay,294,50,2);
//---ボタンエリア
M5.Lcd.fillRect(0,217,320,20,TFT_LIGHTGREY);
//---ボタン文字
M5.Lcd.setTextColor(TFT_BLACK,TFT_YELLOW);
M5.Lcd.drawCentreString(" TAKE OFF ",64,220,2);
M5.Lcd.setTextColor(TFT_BLACK,TFT_RED);
M5.Lcd.drawCentreString(" LANDING ",250,220,2);
M5.Lcd.setTextColor(TFT_BLACK,TFT_CYAN);
M5.Lcd.drawCentreString(" STOP ",160,220,2);
//---方向矢印
M5.Lcd.fillTriangle(159,40,189,60,129,60,TFT_GREEN);
M5.Lcd.fillTriangle(159,160,189,140,129,140,TFT_GREEN);
M5.Lcd.fillTriangle(269,100,220,80,220,120,TFT_GREEN);
M5.Lcd.fillTriangle(98,80,98,120,49,100,TFT_GREEN);
//---方向の文字
M5.Lcd.setTextColor(TFT_WHITE,TFT_BLACK);
M5.Lcd.drawCentreString("FORWARD",160,64,2);
M5.Lcd.drawCentreString("BACK",160,120,2);
M5.Lcd.drawCentreString("LEFT",120,92,2);
M5.Lcd.drawCentreString("RIGHT",200,92,2);
//---メッセージ領域
M5.Lcd.drawRoundRect(0,180,319,30,4,TFT_WHITE);
//---メッセージのタイトル文字
M5.Lcd.setTextColor(TFT_WHITE,TFT_DARKGREEN);
M5.Lcd.drawCentreString("<Message>",38,170,1);
//---メッセージの文字
//M5.Lcd.setTextColor(TFT_WHITE,TFT_BLACK);
//M5.Lcd.drawString(msg,4,190,1);
//初期設定
//Wireライブラリを初期化
Wire.begin();
//Wiiヌンチャクを初期化
nunchuck1.begin();
if (nunchuck1.type == Unknown) {
nunchuck1.type = NUNCHUCK;
}
//WiFi通信の開始
WiFi.begin(TELLO_SSID, "");
//WiFi接続 接続するまでループ
while (WiFi.status() != WL_CONNECTED) {
print_msg("Now, WiFi Connecting......");
delay(500);
}
print_msg("WiFi Connected.");
// UDP
Udp.begin(PORT);
//Telloへ”command”送信
print_msg("sendMessage commend");
tello_command_exec("command");
delay(500);
print_msg("Operation Start!");
}
void loop() {
// ヌンチャク値の取得
nunchuck1.readData();
ail = (nunchuck1.getJoyX()-128) / 100.0;
ele = (nunchuck1.getJoyY()-128) / 100.0;
thr = (nunchuck1.getAccelY()-512) / 256.0;
rud = (nunchuck1.getAccelX()-512) / 256.0;
// 画面表示
sprintf(msg_jx,"%-2.2f",ail);
M5.Lcd.drawCentreString(" ",88,30,2);
M5.Lcd.drawCentreString(msg_jx,88,30,2);
sprintf(msg_jy,"%-2.2f",ele);
M5.Lcd.drawCentreString(" ",294,30,2);
M5.Lcd.drawCentreString(msg_jy,294,30,2);
sprintf(msg_ax,"%-2.2f",rud);
M5.Lcd.drawCentreString(" ",88,50,2);
M5.Lcd.drawCentreString(msg_ax,88,50,2);
sprintf(msg_ay,"%-2.2f",thr);
M5.Lcd.drawCentreString(" ",294,50,2);
M5.Lcd.drawCentreString(msg_ay,294,50,2);
//離陸
if(M5.BtnA.wasPressed()) { // ボタンA
print_msg("TAKE OFF");
tello_command_exec("takeoff");
}
if(nunchuck1.getButtonC() ) { // ヌンチャクCボタン
print_msg("TAKE OFF");
tello_command_exec("takeoff");
}
//停止
if(M5.BtnB.wasPressed()) { //ボタンB処理
print_msg("STOP"); // 通信不良などの暴走時にはボタンBで止める
tello_command_exec("rc 0 0 0 0");
}
//着陸
if(M5.BtnC.wasPressed()) { //ボタンC処理
print_msg("LAND");
tello_command_exec("land");
}
if(nunchuck1.getButtonZ() ) { // ヌンチャクZボタン
print_msg("LAND");
tello_command_exec("land");
}
//スティックの0.3,加速度の0.5は実測値から閾値を設定した
if (fabs(ail)> 0.3 || fabs(ele)> 0.3 || fabs(thr)> 0.5 || fabs(rud)> 0.5){
// 不感帯設定 (微弱な加速度値で上昇や旋回しないように)
ail = (fabs(ail)>0.3)? ail : 0.0;
ele = (fabs(ele)>0.3)? ele : 0.0;
thr = (fabs(thr)>0.5)? thr : 0.0;
rud = (fabs(rud)>0.5)? rud : 0.0;
sprintf(command_str,"rc %d %d %d %d",int(ail*100), int(ele*100), int(-thr*100), int(rud*100) );
tello_command_exec(command_str);
} else {
tello_command_exec("rc 0 0 0 0");
}
delay(50);
M5.update();
}
/////////////////////////////
// ユーザ関数定義 //
/////////////////////////////
// 画面メッセージエリアへ状況メッセージ表示
void print_msg(String status_msg){
M5.Lcd.setTextColor(TFT_WHITE,TFT_BLACK);
M5.Lcd.drawString(" ",4,190,1);
M5.Lcd.drawString(status_msg,4,190,1);
status_msg="";
}
// Telloへメッセージ送信&コマンド実行
void tello_command_exec(char* tello_command){
Udp.beginPacket(TELLO_IP, PORT);
Udp.printf(tello_command);
Udp.endPacket();
// message = listenMessage();
delay(10);
}
// Telloからのメッセージ受信
String listenMessage() {
int packetSize = Udp.parsePacket();
if (packetSize) {
IPAddress remoteIp = Udp.remoteIP();
int len = Udp.read(packetBuffer, 255);
if (len > 0) {
packetBuffer[len] = 0;
}
}
delay(10);
return (char*) packetBuffer;
}
スケッチの解説
Wiiヌンチャクのクラスをグローバル変数でAccessory nunchuck1;と作っています.
ヌンチャクの初期化は,setup()関数内でnunchuck1.begin();と書きます.
ヌンチャクの値の取得は,loop()関数内でnunchuck1.readData();で行っています.
その後,以下のメンバ関数(メソッド)を使って,値を取ります.
nunchuck1.getJoyX() // ジョイスティックX 0〜128〜256
nunchuck1.getJoyY() // ジョイスティックY 0〜128〜256
nunchuck1.getAccelY() // 加速度X 0〜512〜1024?
nunchuck1.getAccelX() // 加速度Y 0〜512〜1024?
nunchuck1.getButtonC() // ヌンチャクCボタン オンでtrue
nunchuck1.getButtonZ() // ヌンチャクZボタン オフでfalse
本家のプログラムでは,加速度の値を±1.0の範囲で正規化していたので,
ここでも同様に正規化を行います.
ail = (nunchuck1.getJoyX()-128) / 100.0;
ele = (nunchuck1.getJoyY()-128) / 100.0;
thr = (nunchuck1.getAccelY()-512) / 256.0;
rud = (nunchuck1.getAccelX()-512) / 256.0;
ただし,本来の正規化ならば「128を引いた後に128で割る」「512を引いた後に512で割る」べきなのですが,実際のセンサ値を見て,除数を調整しました.
ちなみに,変数名は航空用語の
・ail(aileron:エルロン)
・ele(elevator:エレベータ)
・thr(throttle:スロットル)
・rud(rudder:ラダー)
を使っています.ドローンをやる人にはお馴染みの用語ですね.
本プログラムでは,ヌンチャクを「左右に倒すと旋回」「前に倒すと下降」「手前に引くと上昇」する仕様になっています.
**スティックや加速度の割り当てを変更することで,自分の好みの操縦方法に変更することができます**ので,試してみてください.
rcコマンドの送信直前には,三項演算子(ハテナ文)を使って不感帯を設定しました.
// 不感帯設定 (微弱な加速度値で上昇や旋回しないように)
ail = (fabs(ail)>0.3)? ail : 0.0;
ele = (fabs(ele)>0.3)? ele : 0.0;
thr = (fabs(thr)>0.5)? thr : 0.0;
rud = (fabs(rud)>0.5)? rud : 0.0;
スティックを倒すと,手が微妙に倒れてしまって,変に上下したり旋回したりするので,しきい値よりも小さい時は0.0に落としています.
おわりに
今回は,WiiChuckライブラリとM5StackのGrove I2Cポートを使ってTelloを操縦してみました.
FACESジョイスティックも操縦しやすかったのですが,前後左右移動と旋回上下移動は,同時に行うことができませんでした.
今回のWiiヌンチャクだと同時入力が可能なので,ノーズ イン サークルや8の字飛行なども頑張ればやれます(^^
しかし,筆者が中古で買ったWiiヌンチャクは,左右に倒した時の加速度の値が異なっていて,左旋回だけが非常に敏感でした(T_T
加速度の最大最小値を記録し,左右で異なる係数を掛けるという「キャリブレーション処理」を書くべきですね.
WiiChuckライブラリはヌンチャクだけでなく,クラシックコントローラにも対応しています.
次回は,クラシックコントローラで普通に操縦できるようにしたいと思います.