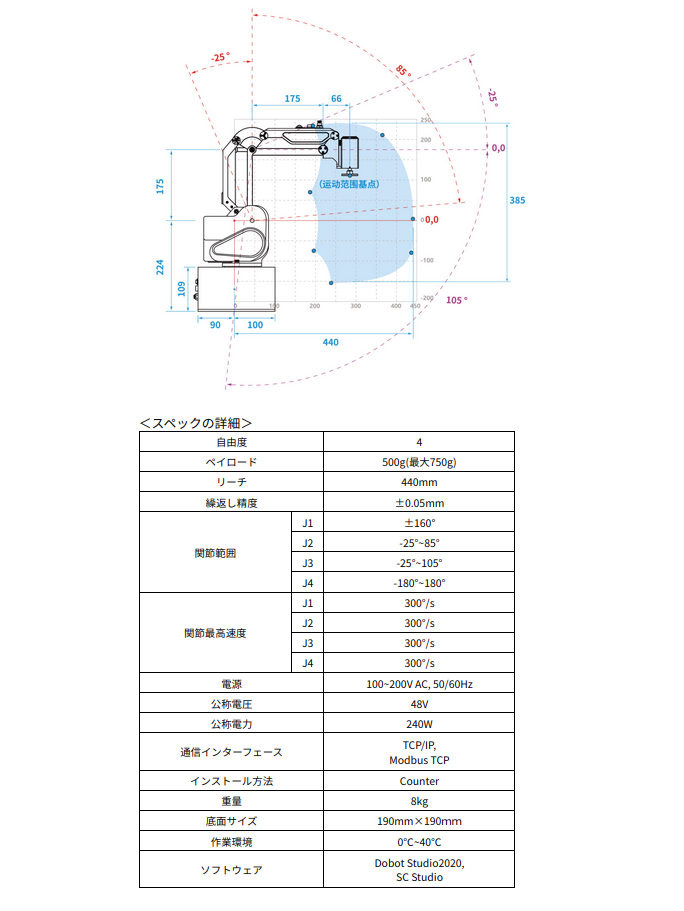
DOBOT MG400の可動域を描画します。
スペックは次のようになります。
-
寸法
リンク1 = 175mm
リンク2 = 175mm
エンドオフセット (66,0,0) -
関節範囲
J1 -160 ~ 160
J2 -25 ~ 85
J3 -25 ~ 105
mg400.py
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import math
L1 = 284 - (175 + 66)
L2 = 175
L3 = 175
L4 = 66
def ki(j1,j2,j3):
if(check_joint_limit(j1,j2,j3) == False):
raise Exception('out of range')
j1_rad = math.pi * j1 / 180
j2_rad = math.pi * j2 / 180
j3_rad = math.pi * j3 / 180
l =L1 + L2 * math.sin(j2_rad) + L3 * math.cos(j3_rad) + L4
z = L2 * math.cos(j2_rad) - L3 * math.sin(j3_rad)
x = l * math.cos(j1_rad)
y = l * math.sin(j1_rad)
return (x,y,z)
def check_joint_limit(j1,j2,j3):
d_j = j3 - j2
if (j1 >= -160 and j1 <= 160):
if (j2 >= -25 and j2 <= 85):
if (j3 >= -25 and j3 <= 105):
return True
return False
def check_coordinate(x,y,z):
if x < 150 and x > -150:
if y < 150 and y > -150:
return False
return True
fig = plt.figure()
ax = Axes3D(fig)
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlabel("Z")
ax.set_xlim(-500,500)
ax.set_ylim(-500,500)
ax.set_zlim(-200,250)
points = []
for j1 in range(-180,180,10):
for j2 in range(-180,180,10):
for j3 in range(-180,180,10):
try:
x,y,z = ki(j1,j2,j3)
if check_coordinate(x,y,z):
ax.plot([x],[y],[z],marker=".",linestyle='None',color='blue',alpha=0.2)
points.append([x/1000,y/1000,z/1000])
except:
pass
# plt.show()
### change to ply
import open3d as o3d
import numpy as np
xyz = np.array(points)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(xyz)
o3d.io.write_point_cloud("mg400.ply", pcd)
生成された点群をcloudcompareで描画すると次の様になりました。
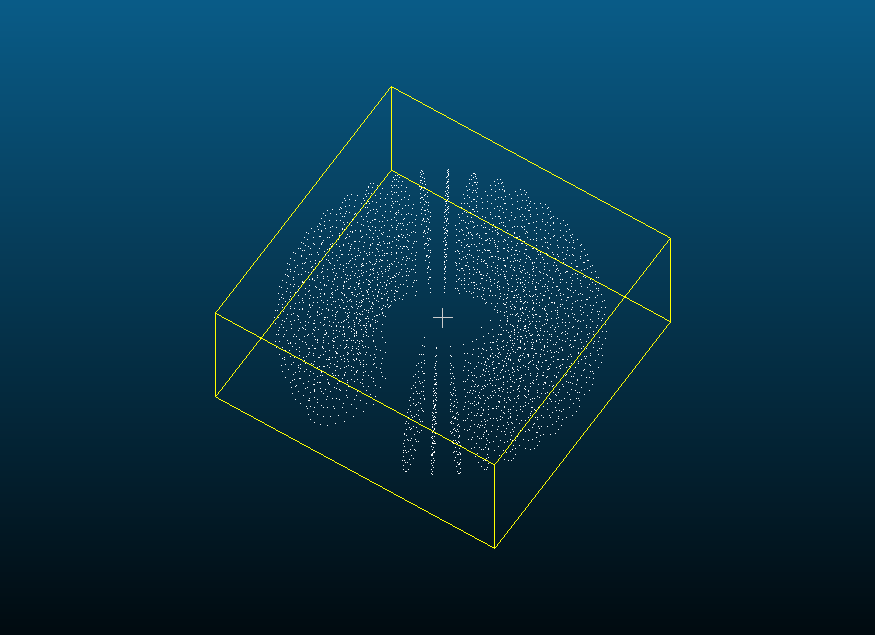
参考