はじめに
ROSのPointCloud2を切り取る方法がないかと思い調べました.
jsk-pcl-rosというパッケージのattention_clipperを使用すると指定したbox内の点群を切り取ってくれることがわかりました.
本記事で、その使用方法を記載します
環境
ubuntu18.04
ROS:melodic
実行手順
install
sudo apt-get install -y ros-melodic-jsk-pcl-ros
sudo apt-get install -y ros-melodic-jsk-visualization
以下のようにlauchを作成します.input topic nameとsize、frame idは自身の環境に合うように修正します.
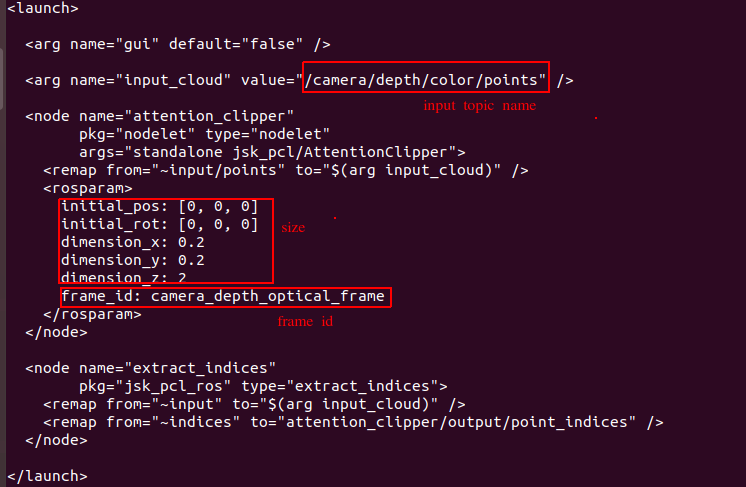
launch
<launch>
<arg name="gui" default="false" />
<arg name="input_cloud" value="/camera/depth/color/points" />
<node name="attention_clipper"
pkg="nodelet" type="nodelet"
args="standalone jsk_pcl/AttentionClipper">
<remap from="~input/points" to="$(arg input_cloud)" />
<rosparam>
initial_pos: [0, 0, 0]
initial_rot: [0, 0, 0]
dimension_x: 0.2
dimension_y: 0.2
dimension_z: 2
frame_id: camera_depth_optical_frame
</rosparam>
</node>
<node name="extract_indices"
pkg="jsk_pcl_ros" type="extract_indices">
<remap from="~input" to="$(arg input_cloud)" />
<remap from="~indices" to="attention_clipper/output/point_indices" />
</node>
</launch>
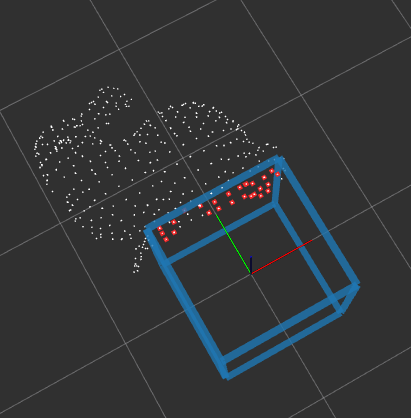
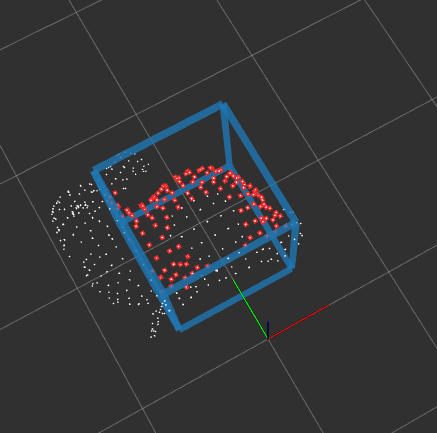
実行すると,以下の写真のように指定したbox内の点群の切り取りができます.

追記:サンプル
以下のパッケージから,attention_clipperを簡単に試すことができます.
使い方を以下に記載します.
install
sudo apt-get install -y ros-melodic-jsk-pcl-ros
sudo apt-get install -y ros-melodic-jsk-visualization
git clone https://github.com/hoshianaaa/jsk_pcl_ros_samples.git
cd ~/catkin_ws/src
catkin build
または
catkin make
source ~/catkin_ws/devel/setup.bash
実行
roslaunch jsk_pcl_ros_samples attention_clipper.launch
attention_clipperのBoundingBoxはtopicによって移動させたり,拡大させたりすることができます.
以下に例を示します.
BoundingBoxの移動
rostopic pub /attention_clipper/input/pose geometry_msgs/PoseStamped "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'base_link'
pose:
position:
x: 0.0
y: 0.1
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0"
BoundingBoxの拡大
rostopic pub /attention_clipper/input/box jsk_recognition_msgs/BoundingBox "header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: 'base_link'
pose:
position: {x: 0.0, y: 0.1, z: 0.0}
orientation: {x: 0.0, y: 0.0, z: 0.0, w: 0.0}
dimensions: {x: 0.2, y: 0.2, z: 0.2}
value: 0.0
label: 0"

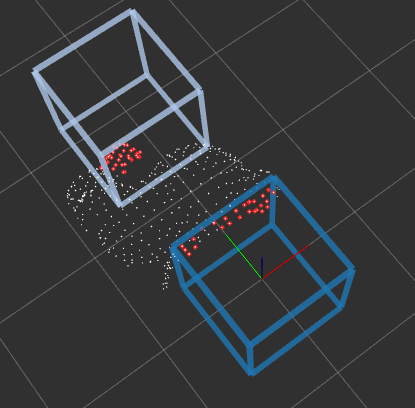
また,複数のBoundingBoxを指定することもできます.
サンプルの起動方法は以下のようになります.
サンプル起動方法(BoundingBox複数)
roslaunch jsk_pcl_ros_samples attention_clipper_multi.launch
以上です,ぜひお試しください!
また動作がうまく行かないまたは、修正点などあればご気軽にご連絡ください.