はじめに
以下のパッケージを使うとrviz内のインタラクティブマーカでtf設定ができます。それをためしたメモ
環境
ros-noetic
内容
- インストール
git clone https://github.com/lucasw/rviz_interactive_tf.git
catkin build
または
cd ~/catkin_ws
catkin make
source ~/catkin_ws/devel/setup.bash
- 実行
roslaunch rviz_interactive_tf demo.launch

program
ちなみにlaunchの中はこんな感じです.
<?xml version="1.0"?>
<launch>
<node name="itf" pkg="rviz_interactive_tf" type="interactive_tf" ns="itf1">
<param name="parent_frame" value="map"/>
<param name="frame" value="tf1"/>
</node>
<!-- when these are chained together, the marker controls don't
appear unless I switch rviz to the tf1 frame, then move tf2,
then I can go back to the map frame and see tf2 markers -->
<node name="itf" pkg="rviz_interactive_tf" type="interactive_tf" ns="itf2">
<param name="parent_frame" value="tf1"/>
<param name="frame" value="tf2"/>
</node>
<node name="rviz" pkg="rviz" type="rviz"
args="-d $(find rviz_interactive_tf)/config/interactive_tf.rviz"/>
</launch>
以下のようrviz_interactive_tfパッケージのinteractive_tfノードを呼び出して,paramで親と子のfrmae名を指定すればok
<node name="itf" pkg="rviz_interactive_tf" type="interactive_tf" ns="itf1">
<param name="parent_frame" value="map"/>
<param name="frame" value="tf1"/>
</node>
設定したtfの値はrostopic echo /tfとすれば取得できます
-
header:
seq: 0
stamp:
secs: 1660977839
nsecs: 761851298
frame_id: "base_link"
child_frame_id: "camera_depth_optical_frame"
transform:
translation:
x: -0.056215815246105194
y: 0.2537241578102112
z: 0.8296752572059631
rotation:
x: 0.048909555696312945
y: 0.9972522335770526
z: -0.04807596233112703
w: 0.028009638218031027
tfの値が決定したらstatic_transform_publisherで値を固定してあげます
<node pkg="tf" type="static_transform_publisher" name="world_to_map" args="0.0001 0 0 0 0 0 /world /map 10" />
さいごに
手動でLidarやデプスカメラなどのセンサー取り付け位置を調べたり,rviz上のロボットを動かしたりできて色々と便利そうですね
追記
rviz_interactive_tfパッケージには,Dynamic reconfigureからtfの位置を設定するためのスクリプトが用意されています.
こちらを使用したほうが数値を指定したtfの設定もできるので微調整が可能かと思われます.
以下に実行方法や使用手順のメモを記載しておきます.
- 実行方法
依存ライブラリのインストール
sudo apt install ros-noetic-ddynamic-reconfigure-python
プログラムの立ち上げ
roscore
rosrun rviz_interactive_tf ddr_tf.py
デバックようにrvizの立ち上げ & tfの可視化
rviz
dynamic_reconfigure設定用GUIの立ち上げ
rosrun rqt_reconfigure rqt_reconfigure
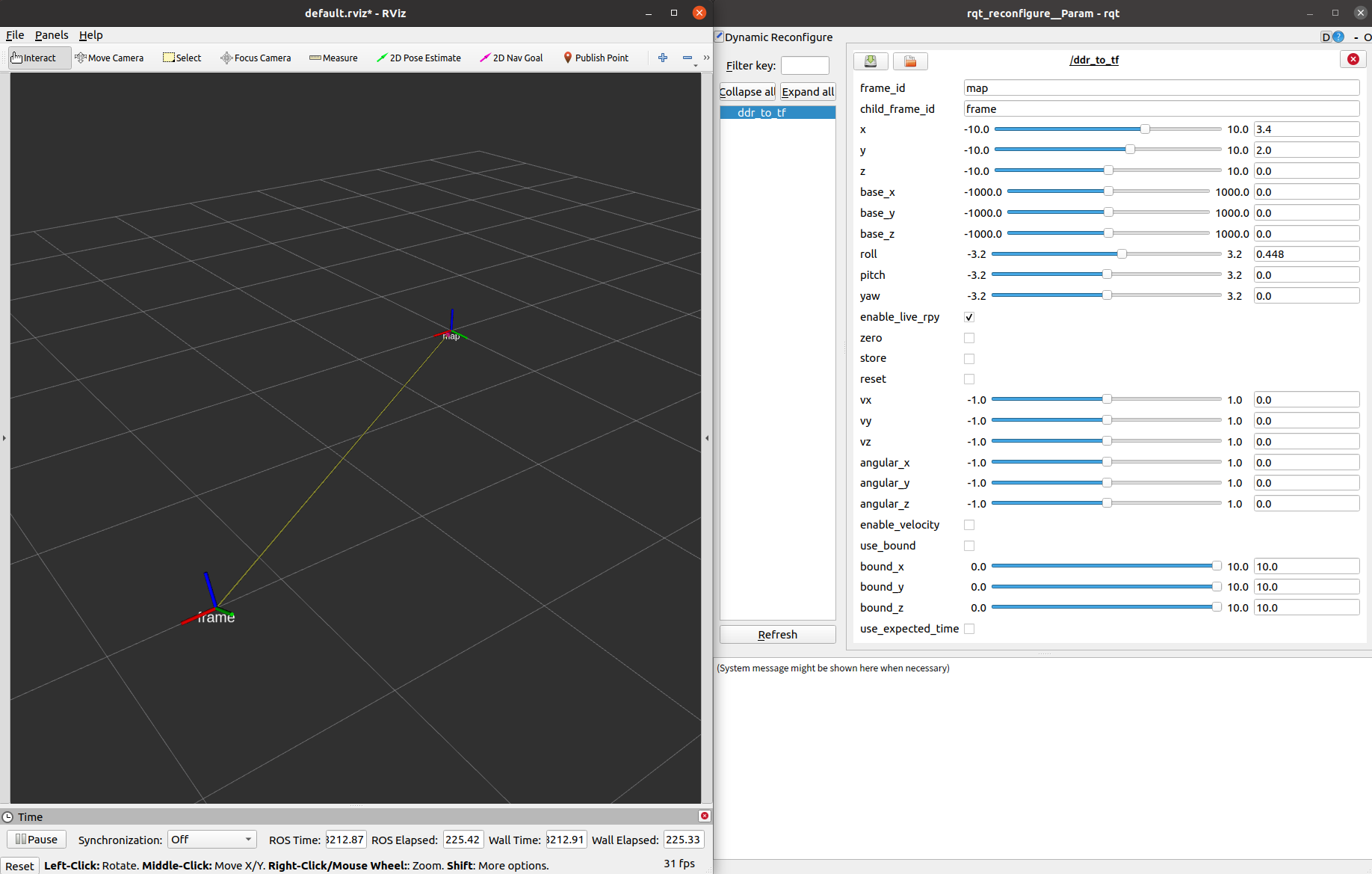
設定した値を保存したい場合GUI上の左上のsaveボタンを押して実施します
値のロードは、rosrun dynamic_reconfigure dynparam load後にddr_tf.pyのノード名 + 保存したパラメータファイル名を指定して実施します
rosrun dynamic_reconfigure dynparam load /ddr_to_tf aaa.yaml