LEGOで作成したロボットなどの角度を取得する方法

EV3のポート1に接続されたジャイロセンサーの値を取得するPythonスクリプト
gyro_test_print.py
#!/usr/bin/env python3
from ev3dev2.sensor.lego import GyroSensor
from ev3dev2.sensor import INPUT_1
import time
# 1. ジャイロセンサーの初期化 (ポート1)
try:
gyro = GyroSensor(INPUT_1)
print("Gyro Sensor connected.")
except Exception as e:
print("Error: Sensor not found on Port 1")
exit()
# 2. センサー値のリセット
print("Resetting Gyro... Keep the sensor still.")
gyro.mode = 'GYRO-ANG' # 角度モードに設定
time.sleep(1) # 安定するまで待機
print("Start reading (Press Ctrl+C to stop)...")
try:
while True:
# 3. 角度の取得
angle = gyro.angle
# 4. 角度の表示
# Python 2/3 両対応の書き方に変更してエラーを防止
print("Angle: {0}".format(angle))
# 5. 0.1秒待機
time.sleep(0.1)
except KeyboardInterrupt:
# Ctrl+C(またはVSCodeの停止ボタン)で終了
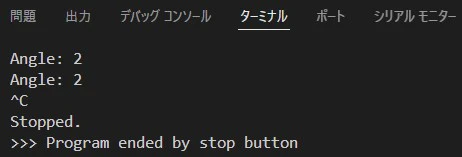
print("\nStopped.")
<実行手順>
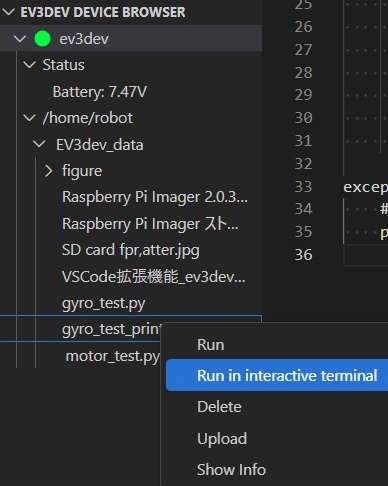
1.接続したev3devに作成したPythonスクリプトをSend to workspace to device
2.送信したファイルtyro_test_print.py上で右クリックして,
Run in interactive terminalを実行
すると,ジャイロセンサーの角度値がVSCodeのターミナルウィンドウに表示される.