GR-CITRUS と RX72T ボードの CAN 通信
RX マイコンに備わっている CAN ペリフェラル
RX マイコンには、CAN 通信(ISO11898-1仕様準拠)を行う機能を備えた品種が数多くあります。
又、複数チャネルを持った品種もあり、様々な構成に対応可能です。
外部に付加するハードウェアーは、CAN バスに対応したトランシーバーを追加するだけで良く、高品質な通信を簡単に行う事が出来ます。
CAN 通信では、最大8バイトのパケットを、1M B.P.S. 程度で送信、受信し、複数の機器をバス状に接続出来ます。
通信信号は、差動で行い、ノイズに強く、長い通信路でも品質を維持します。
パケットは、ID で管理され、ネゴシエーションが自動で行われ、送信タイミングに特別な制限がありません。
※詳しくは、CAN の解説を参照して下さい。
RXマイコン内蔵の CAN ペリフェラルを使い、実際にソフトウェアを実装して利用するには、それなりのハードルがあるものと思います。
※スマートコンフィギュレーターを使って設定を生成する等も一つの選択肢ではありますが、C++ フレームワークの導入は、それより遥かに簡単で、有意義と思います。
※「can_io.hpp」をインクルードするだけですから・・
RX マイコン C++ フレームワークでは、CAN 通信における運用を一般化して、アプリケーションの実装に専念できるようにしています。
C++ を使ったクラスは、簡単で柔軟性があり、間違いが少ない方法で、データ通信が可能なように設計されています。
CAN レジスターや振る舞いに対する知識は殆ど必要ありません。
サンプルプログラムは、RX62N, RX631, RX64M, RX71M, RX66T, RX72T, RX72N に対応したプロジェクトを用意してあります。
※RX63T、RX651/RX65N でも、Makefile を用意すれば同じように利用可能です。
アプリケーションは、フレームワークに従えば、どのRXマイコンでも同じように動作するように実装出来るので、ソースコードの再利用が可能です。
RX62N: FRK-RX62N(CQ 出版社) / BlueBoard-RX62N_100pin を利用
RX631: GR-CITRUS を利用
RX72N: RX72N Envision Kit を利用
RSCAN について
RX マイコンには、RSCAN と呼ばれるペリフェラルを備えた品種も存在します。(RX220、RX24T など)
RSCAN は、周波数が低めの RX マイコン向けのようで、ソフトウェアの比重を少なくし、なるべくハードウェアーで処理させるものと思います。
※その為、制限もあるものと思います。
現在、C++ フレームワークではサポートしていません。
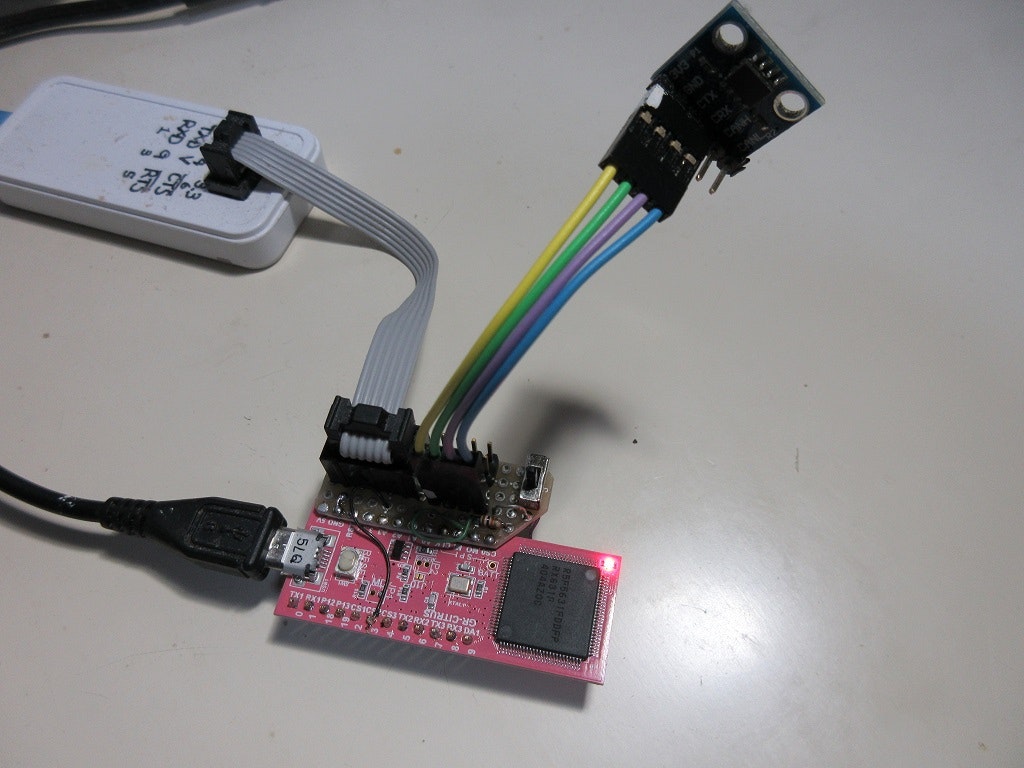
CAN バス・トランシーバーの接続
RX マイコンの CAN 信号は、CTX、CRX の二本で、RX マイコンの品種によって異なりますが、多くの選択肢からポートにアサイン可能です。
バス・トランシーバーは、3.3V、5V 品があり、電源電圧に対応した IC を選択する必要があります。
CAN バス・トランシーバーの代表的な品種
- 3.3V 動作
- 5V 不可
- 最大 1 Mbit/s
- 5V 動作
- I/O 電圧 3.3V、5V 選択可
- 最大 5 Mbit/s
秋月電子では、現在、3種類の CAN バス・トランシーバーを扱っていますが、電源電圧は 5V なので、マイコンが 3.3V 品の場合、別途 5V が必要です。
Amazon:
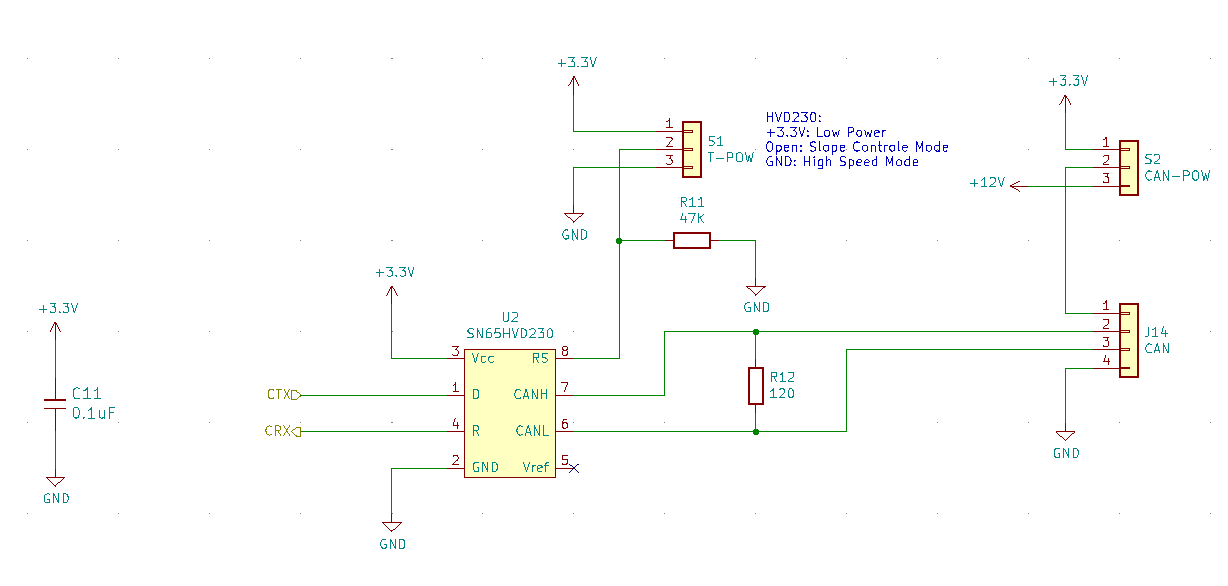
SN65HVD230 CANバストランシーバー通信モジュール
SN65HVD230 の参考回路:
CAN バスポート選択肢
RX マイコン C++ フレームワークでは、ポートの選択肢を変更する機構を備えています。
typedef device::CAN0 CAN0_CH;
static constexpr auto CAN0_PORT = device::port_map::ORDER::FIRST;
typedef device::can_io<CAN0_CH, CAN_RXB, CAN_TXB, CAN0_PORT> CAN0;
CAN0 can0_;
上記のように「device::port_map::ORDER」型を使って、can_io テンプレートクラスに指示します。
選択肢は、各マイコンの「port_map.hpp」に実装があります。
※ハードウェアーマニュアルの「マルチファンクションピンコントローラ(MPC)」の表に記された順番に準拠しています。
上記の場合、FIRST は、以下のように定義されています。
case peripheral::CAN0:
// P33/CRX0
// P32/CTX0
{
uint8_t sel = enable ? 0b1'0000 : 0;
PORT3::PMR.B3 = 0;
PORT3::PMR.B2 = 0;
MPC::P33PFS.PSEL = sel; // ok
MPC::P32PFS.PSEL = sel; // ok
PORT3::PMR.B3 = enable;
PORT3::PMR.B2 = enable;
}
break;
「device::port_map::ORDER::SECOND」とすると、PD2/CRX0、PD1/CTX0 が選択されます。
詳しくは、各マイコンの port_map.hpp を参照して下さい。
GR-CITRUS の場合 (FIRST):
P33/RXD3/SCL3(11) : CRX
P32/TXD3/SDA3(10) : CTX
サンプルプログラムのダウンロードとコンパイル
- RX マイコン C++ フレームワークは、Github で入手可能です。
- C++ コンパイラ、gcc-8.3.0 は、ルネサスエレクトロニクスからダウンロード可能です。
- コンパイルには、MSYS2(Windows)をインストールする必要があります。
- boost-1.74.0 が必要です。
- テキストエディターが必要なら、VSCode をインストールして下さい。
- Windows のターミナルソフトは TeraTerm が便利です。
参照:
コンパイル
GR-CITRUS の場合:
CAN_sample/RX631 に移動、「make」します。
/d/Git/RX/CAN_sample/RX631 % make
...
text data bss dec hex filename
96428 16880 10836 124144 1e4f0 can_sample.elf
rx-elf-objcopy --srec-forceS3 --srec-len 32 -O srec can_sample.elf can_sample.mot
rx-elf-objdump -h -S can_sample.elf > can_sample.lst
※CC-RX コンパイラは、C++11 以降に対応していない為、コンパイルする事が出来ません。
CAN サンプルの使い方
CAN サンプルでは、シリアルターミナルを接続して、対話形式によって CAN 通信を行います。
※通常二台で通信するので、通信実験を行うには、CAN 対応RXマイコン、USB シリアルなど二組必要です。
CAN サンプルでは、CAN0 のインスタンスに対して「can_analizer」クラスによるデータ収集、解析を提供しています。
複数チャネルを有効にした場合、CAN1 のインスタンスに対して、ID フィルターを行うコンパイルオプションがあります。
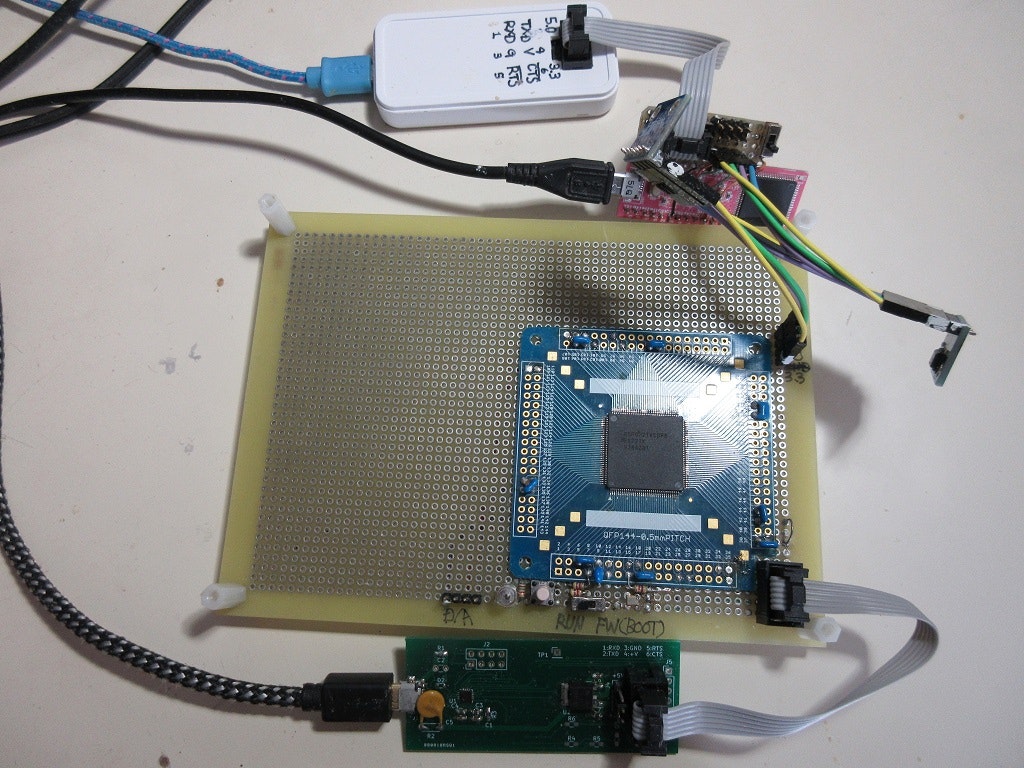
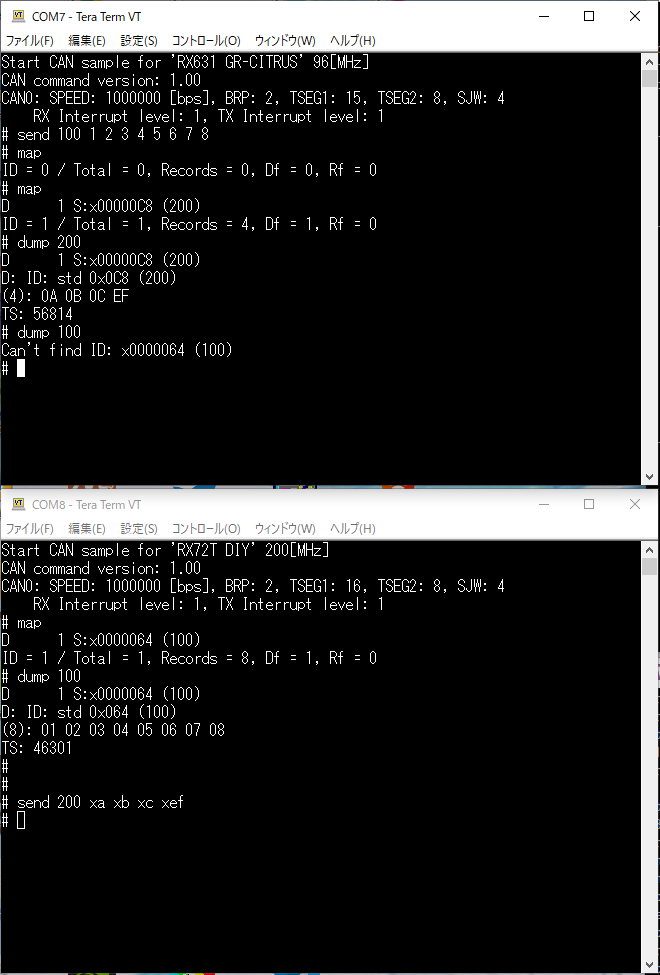
下記の例は、GR-CITRUS と RX72T-DIY ボードによるものです。
共にシングルチャネルで、双方でデータ送信、受信を実験します。
対話コマンド
対話形式で、CAN データ送信、受信の確認等が出来ます。
- プログラムを起動すると、常に全ての ID を受信します。
- ID の収集は「can_analizer」クラスで行っており、boost::unoderd_map を使っています。
- ID の収集がメモリの限界を超えると、メモリ不足でエクセプションがスローされてクラッシュすると思われます。
- send_loop コマンドにより、乱数で生成した ID、データを連続で送信します。
- ID を補足する機能(map)は、チャネル0番のみに備わっています。
- RX64M/RX71M では、2チャネルの CAN を有効にします。
- CAN1 の受信では、受信したデータを常に表示します。
- MB-no はメールボックスの番号です。
- メールボックス関係のコマンドは、デバッグ用です。
- 受信した CAN フレームは、メモリに格納され、「dump」コマンドで確認出来ます。
- 同じ ID に新しいデータフレームが来ると、上書きされ、カウンタが進みます。
CAN command version: 1.00
ext set ext-id mode
std set std-id mode
send CAN-ID [data...] send data frame
stat MB-no stat MCTLx register (MB-no: 0 to 31)
list MB-no list MBx register (MB-no: 0 to 31)
status list recv/send error count
clear [CAN-ID] clear map
map [CAN-ID] Display all collected IDs
dump CAN-ID dump frame data
send_loop NUM [-rtr] random ID, random DATA, send loop (RTR)
help command list (this)
Input number: nnn decimal, xnnn hexa-decimal, bnnn binary
ch コマンド
- 「#define MULTI」を有効にした場合で、CAN1 のインスタンスがある場合に、カレントチャネルを変更する。
valid コマンド
- VALID フィルターを有効にする、無効にする。
valist コマンド
- 有効な ID リストを表示。
ext コマンド
- 拡張 ID モードにする。
std コマンド
- 標準 ID モードにする。
send CAN-ID [data...] コマンド
- ID を指定して、データ列を送信。
- ID のみの場合、リモートフレームの送信。
- 最大8バイトのデータ列送信。
- 数値は、10進数、16進数(先頭に x を付ける)、2進数(先頭に b を付ける)を入力可能。
stat MB-no コマンド(デバッグ用)
- CAN MCTLx レジスターの表示。
- MB-no は、0~31
list MB-no コマンド(デバッグ用)
- CAN MBx レジスターの表示。
- MB-no は、0~31
clear [CAN-ID] コマンド
- can_analizer クラスの個別 ID 情報のクリア。
- can_analizer クラスの収集履歴を全てクリア。
map [CAN-ID] コマンド
- can_analizer クラスが収集した ID の表示。
- 個別 ID の詳細表示。
dump [CAN-ID] コマンド
- can_analizer クラスの個別 ID に関するフレームデータ表示。
- フレームデータは、その ID が最後に取得したものになります。
send_loop [num] コマンド
- ID を乱数で生成して、データ送信を行う。
- データ送信を繰り返す数を指定する。
help コマンド
- コマンドの簡単な説明を表示。
can_io クラス
- can_io クラスは、CAN フレームを FIFO バッファを通してやりとりし、CAN ハードウェアーの操作を隠蔽しています。
- 基本的に、ID を指定して、データ列を送るだけです。
- 受信動作では、CAN フレームクラスにデータがセットされてバッファに積まれます。
- アプリケーションは、バッファに積まれたデータをディスパッチして所定の動作を行うだけです。
- 必要な情報を取得する事も出来ます。
- 詳細は「common/can_io.hpp」を参照下さい。
CAN チャネル
- RXマイコンの種類により、利用出来るチャネル数が異なります。
- CAN の通信ラインを利用可能なポートにアサイン出来ない場合があります。
- ポートのアサインは、port_map.hpp を参照して下さい。
- 「ハードウェアーマニュアル、マルチファンクションピンコントローラ(MPC)、マルチプル端子の割り当て端子一覧」でも確認する事が出来ます。
- インスタンスを定義する時、「device::CAN0」のように指定します。
| マイコン | RX621/RX62N | RX631/RX63N | RX64M/RX71M | RX651/RX65N | RX72N | RX66T/RX72T |
|---|---|---|---|---|---|---|
| CAN0(CAN) | 〇 | 〇 | 〇 | 〇 | 〇 | 〇 |
| CAN1 | - | 〇 | 〇 | 〇 | 〇 | - |
| CAN2 | - | 〇 | 〇 | - | 〇 | - |
受信、送信バッファのサイズ指定
- utils::fixed_fifo テンプレートクラスを使い、「device::can_frame」型(クラス)で定義します。
can_io テンプレートクラスの「typedef」で、以下のように定義します。(受信、送信、256 フレームの場合)
// CAN 受信バッファの定義
typedef utils::fixed_fifo<device::can_frame, 256> CAN_RXB;
// CAN 送信バッファの定義
typedef utils::fixed_fifo<device::can_frame, 256> CAN_TXB;
typedef device::can_io<CAN0_CH, CAN_RXB, CAN_TXB, CAN0_PORT> CAN0;
CAN0 can0_;
- サイズは、メインループのリフレッシュレート、CAN フレームの通信頻度により適切な値を定義します。
- メインループを 1/100 秒で回すのなら、1M B.P.S の通信速度なら、最大のフレーム数は 160 位なので、256 あれば十分でしょう。
- 16 フレーム以下のサイズを指定した場合、static_assert によりコンパイルを失敗します。
通信速度の指定
CAN の通信速度は、125K ~ 1M の間で選択出来ます。
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief CAN スピード型
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
enum class SPEED {
_50K = 50'000, ///< 50 Kbps(標準ではない)
_100K = 100'000, ///< 100 Kbps(標準ではない)
_125K = 125'000, ///< 125 Kbps
_250K = 250'000, ///< 250 Kbps
_500K = 500'000, ///< 500 Kbps
_750K = 750'000, ///< 750 Kbps(標準ではない)
_1M = 1'000'000 ///< 1 Mbps
};
CAN の開始
- 通信速度を指定して、「start」を呼ぶだけです。
- 必要な設定は、全て、can_io クラスが行います。
- 何等かの理由で、開始出来ない場合「false」が返ります。
- 何も指定しない場合、割り込みの優先度はレベル「1」が使われます。
if(!can0_.start(CAN::SPEED::_1M)) {
utils::format("Can't start CAN0...\n");
} else {
utils::format("CAN0: SPEED: %u [bps], BRP: %u, TSEG1: %u, TSEG2: %u, SJW: %u\n")
% can0_.get_speed()
% can0_.get_bcr_brp() % can0_.get_bcr_tseg1() % can0_.get_bcr_tseg2()
% can0_.get_bcr_sjw();
utils::format(" RX Interrupt level: %u, TX Interrupt level: %u\n")
% static_cast<uint16_t>(can0_.get_rxm_level())
% static_cast<uint16_t>(can0_.get_txm_level());
}
フレームの送信
- フレームの送信は、ID、データ列、データサイズのパラメータで行います。
//-----------------------------------------------------------------//
/*!
@brief データ送信 @n
src が「nullptr」、又は「len」が「0」の場合、リモートフレーム送信。
@param[in] id SID+EID の ID
@param[in] src 送信データポインター
@param[in] len 送信データ数
@param[in] ide 拡張モードの場合「true」
@return 成功なら「true」
*/
//-----------------------------------------------------------------//
bool send(uint32_t id, const void* src, uint32_t len, bool ide = false) noexcept
ID: 1000 で、データ列:1, 2, 3, 0xa, 0xb, 0xc を送信。
uint8_t data[] = { 1, 2, 3, 0xa, 0xb, 0xc };
can0_.send(1000, data, sizeof(data));
ID: 900 のリモートフレーム(データ列が無い)を送信。
can0_.send(900, nullptr, 0);
拡張 ID: 0x10000 のリモートフレーム送信。
can0_.send(0x10000, nullptr, 0, true);
何等かの理由で送信に失敗すると「false」が返ります。
フレームの受信
- 受信したフレームは、FIFO バッファに格納されます。
- 受信したフレーム数を取得します。
- フレーム数分、受信フレームを取り出して処理します。
- この処理は、メインループ内で常に動かして、バッファが溢れないように配慮する必要があります。
- サンプルでは、メインループを 100Hz で動かしています。(一つのターンが 10 ミリ秒)
- タイミング的に、フレームを受信して応答するまでに、最悪 10 ミリ秒かかります。
- メインループのリフレッシュレートは、通信の頻度、バッファのサイズ、応答速度などにより決定します。
while(can0_.get_recv_num() > 0) {
auto frm = can0_.get_recv_frame();
utils::format("\nCAN0:\n");
CAN::list(frm, " ");
}
can_frame クラス
- 受信したフレームは、このクラスにコピーされます。
- 詳細は、can_frame クラスを参照下さい。
CAN/ID フィルター
- CAN では、パケットは ID で管理する為、誰かが、パケットを送信すると、全員に同じ物が届きます。
- その為、自分に必要が無いパケットは無視する事になります。
- CAN ペリフェラルは、特定の ID にだけ応答するような設定も可能ですが、個数に制限があり、開始する前に決めなければなりません。
- この仕様では一般化が難しいので、常に全てのパケットを受信するようにしています。
- RX マイコンは、非常の性能が高いので、全てのパケットに応答しても、全体のパフォーマンスが低下する事は少ないです。
- C++ を使うと、特定のパケットにだけ応答する機能を簡単に、効率良く実装出来ます。
- ビットマスクも併用すれば、効率はさらに上がります。(ビットマスクだけなら、さらに簡単)
- フィルタ処理をソフトウェアで行えば柔軟性は無限大です。
main.cpp には、通過する事が出来る ID リストを使った、フィルターのサンプルコードが含まれます。
※この機能は、「MULTI」チャネルの場合に利用されています。
※シングルチャネルの場合、「can_analizer」クラスが標準で、このクラスが、ID の収集を自動で行っています。
フィルターには、「boost/unordered_set.hpp」を利用しています。
main.cpp の先頭で、「#define VALID_FILTER」をコメントアウトすると、フィルターをスルーします。
有効な ID テーブルは、以下のように定義します。
boost::unordered_set を使っています。
// 有効な ID だけ通すフィルター
typedef boost::unordered_set<uint32_t> VALID;
VALID valid_{ 0x123, 0x200, 0x300, 0xaaa, 15, 21, 33 };
メインループで、CAN の受信フレームをディスパッチする際に、ID が有効か確認し、無効な ID を無視します。
while(can1_.get_recv_num() > 0) {
auto frm = can1_.get_recv_frame();
#ifdef VALID_FILTER
if(valid_.find(frm.get_id()) != valid_.end()) { // ID がマッチするか?
#else
{
#endif
utils::format("\nCAN1:\n");
CAN::list(frm, " ");
}
}
- 「boost::unordered_set」はハッシュを使ったテンプレートクラスで、フィルターの数は、メモリ(RAM)の容量に依存します。
- ハッシュを使っているので、効率よく(少ないコストで)探します。
- ID を動的に追加したり、削除したりが簡単に行えます。
- 「unordered_map」を使えば、指定 ID での挙動(コールバック関数)などをコントロールする事も出来ます。
- このような実装は、C++ の本領発揮で、本当に便利で簡単です。
まとめ
C++ で実装された CAN 通信クラスのおかげで、CAN 通信を手軽に行う事が出来ます。
組み込みマイコンで、C++ を積極利用する人は少ないのですが、高性能な RX マイコンなら、習得する価値は十分大きいと思います。