はじめに
自分は小学生の頃、自由帳に書くものといえば、キン肉マンか迷路。これが2大コンテンツでした。ある日「惡魔の迷図」(悪魔の迷図)(DEVIL'S MAZES)で遊んで(買ってもらったのか、ねだったのか、兄か親かも、おぼえてないけど)これは本当に楽しかった。
悪魔の迷図とは巨大なA1サイズの巨大迷路で、解くと絵が出るやつです。
ほどなく、書店で見かけることはなくなり(自分じゃないけど)、待望する気持ちだけが子供心に残りました。
何種類かやったけど、いま調べた感じで最低でも6種類(2520/3551/4335/8311/8693/4438)、推測では25種類あるみたいですね。
https://www.kosho.or.jp/products/detail.php?product_id=282227072
https://note.com/shiroyukimin/n/n69334f087d14
やっぱり、自分は迷路好き、ということの再確認。
迷路プログラム
題材として、定番でしょうか。大別して、穴掘り法と、壁生成法があった気がします。
経緯のメモ
上のサイトから、以下のローグライクダンジョン生成サイトを知り、
以下の迷路アルゴリズム一覧サイトを知り、
以下の再帰的バックトラッキングアルゴリズムをたどりました。
様々な迷路生成アルゴリズムが紹介されている中で、一番美しく感じました。
そして、AIに変換してもらったものがこちらです。
テキスト出力版をグラフィカルにして、さらに、アニメーションも。
AIは、こちらの心を見透かして、先回りしてくれました。
再帰的バックトラッキングによる迷路生成

int cols, rows;
int w = 40;
Cell[][] grid;
ArrayList<Cell> stack = new ArrayList<Cell>();
void setup() {
size(800, 800);
frameRate(60);
cols = floor(width / w);
rows = floor(height / w);
grid = new Cell[cols][rows];
// グリッド初期化
for (int j = 0; j < rows; j++) {
for (int i = 0; i < cols; i++) {
grid[i][j] = new Cell(i, j);
}
}
grid[0][0].visited = true;
stack.add(grid[0][0]);
}
void draw() {
background(255);
// グリッド描画
for (int j = 0; j < rows; j++) {
for (int i = 0; i < cols; i++) {
grid[i][j].show();
}
}
// 探索処理
if (!stack.isEmpty()) {
Cell current = stack.get(stack.size() - 1);
Cell next = current.checkNeighbors();
if (next != null) {
next.visited = true;
stack.add(next);
removeWalls(current, next);
} else {
stack.remove(stack.size() - 1);
}
}
}
// 壁を削除
void removeWalls(Cell a, Cell b) {
int x = a.i - b.i;
int y = a.j - b.j;
if (x == 1) {
a.walls[3] = false;
b.walls[1] = false;
} else if (x == -1) {
a.walls[1] = false;
b.walls[3] = false;
} else if (y == 1) {
a.walls[0] = false;
b.walls[2] = false;
} else if (y == -1) {
a.walls[2] = false;
b.walls[0] = false;
}
}
// セルクラス
class Cell {
int i, j;
boolean[] walls = { true, true, true, true }; // top, right, bottom, left
boolean visited = false;
Cell(int i, int j) {
this.i = i;
this.j = j;
}
void show() {
int x = i * w;
int y = j * w;
stroke(0);
if (walls[0]) line(x, y, x + w, y);
if (walls[1]) line(x + w, y, x + w, y + w);
if (walls[2]) line(x + w, y + w, x, y + w);
if (walls[3]) line(x, y + w, x, y);
if (visited) {
noStroke();
fill(200, 0, 255, 100);
rect(x, y, w, w);
}
}
Cell checkNeighbors() {
ArrayList<Cell> neighbors = new ArrayList<Cell>();
if (i > 0) {
Cell left = grid[i - 1][j];
if (!left.visited) neighbors.add(left);
}
if (i < cols - 1) {
Cell right = grid[i + 1][j];
if (!right.visited) neighbors.add(right);
}
if (j > 0) {
Cell top = grid[i][j - 1];
if (!top.visited) neighbors.add(top);
}
if (j < rows - 1) {
Cell bottom = grid[i][j + 1];
if (!bottom.visited) neighbors.add(bottom);
}
if (neighbors.size() > 0) {
int r = int(random(neighbors.size()));
return neighbors.get(r);
} else {
return null;
}
}
}
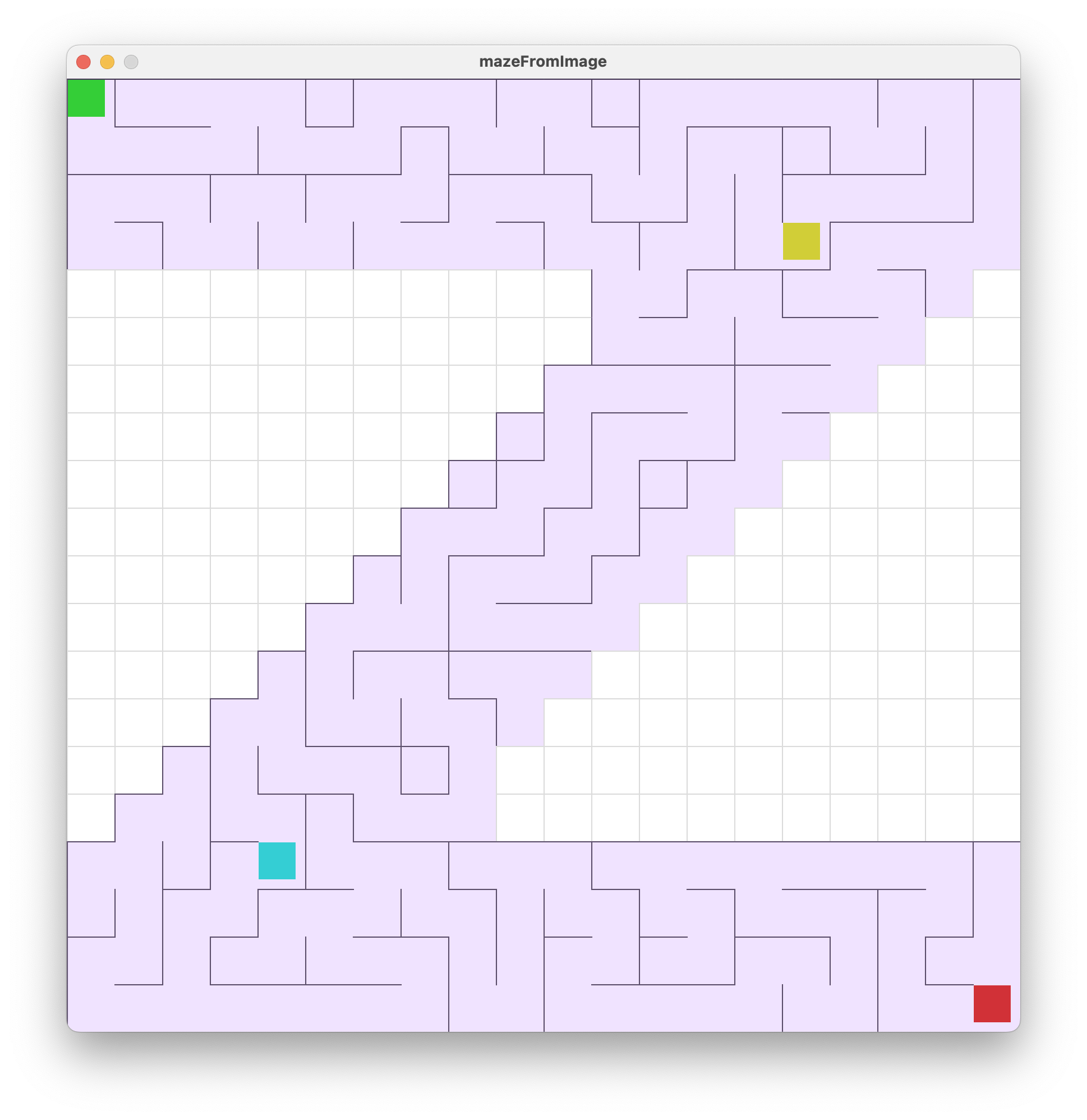
追記 2025/11/02
メモ(うまくいってない)
1,ハミルトン路問題
NP問題になり、正攻法では解決は困難。
2,パリティの説明
市松模様に塗った場合、数が同じでなければならない。
3,constraint-based maze
要文献調査
int cols, rows;
int w = 40;
Cell[][] grid;
ArrayList<Cell> stack = new ArrayList<Cell>();
boolean[][] mask; // 黒Zだけtrue(通ってよい)
Cell[] waypoints = new Cell[4];
void setup() {
size(800, 800);
frameRate(60);
cols = width / w;
rows = height / w;
// グリッド初期化
grid = new Cell[cols][rows];
for (int j = 0; j < rows; j++) {
for (int i = 0; i < cols; i++) {
grid[i][j] = new Cell(i, j);
}
}
// 1. マスク読み込み(黒だけ通る)
mask = loadMask("z.png", cols, rows);
// 2. 中継地点をマスク上にスナップしておく
waypoints[0] = snapToMask(0, 0); // (0,0)
waypoints[1] = snapToMask(cols-5, 3); // (39,0)
waypoints[2] = snapToMask(4, rows-4); // (0,39)
waypoints[3] = snapToMask(cols-1, rows-1); // (39,39)
// 3. (0,0) → (39,0) を「DFS迷路」で掘る
carveSegmentDFS(waypoints[0], waypoints[1]);
// 4. (39,0) → (0,39)
carveSegmentDFS(waypoints[1], waypoints[2]);
// 5. (0,39) → (39,39)
carveSegmentDFS(waypoints[2], waypoints[3]);
// 6. 残りを埋めるために最後の地点から通常DFSを続ける
waypoints[3].visited = true;
stack.add(waypoints[3]);
}
void draw() {
background(255);
// 描画
for (int j = 0; j < rows; j++) {
for (int i = 0; i < cols; i++) {
grid[i][j].show();
}
}
// 残っているマスク領域を普通のDFSで埋める
if (!stack.isEmpty()) {
Cell current = stack.get(stack.size()-1);
Cell next = current.checkNeighborsMask(); // マスク内だけ見る
if (next != null) {
next.visited = true;
removeWalls(current, next);
stack.add(next);
} else {
stack.remove(stack.size()-1);
}
} else {
// まだ未訪問のマスクがあれば、そこからまたDFSを始める
Cell c = findUnvisitedMaskCell();
if (c != null) {
c.visited = true;
stack.add(c);
}
}
}
/* =========================================================
画像 → マスク(黒だけtrue)
========================================================= */
boolean[][] loadMask(String fname, int cols, int rows) {
PImage img = loadImage(fname);
img.resize(cols, rows);
img.loadPixels();
boolean[][] m = new boolean[cols][rows];
for (int y = 0; y < rows; y++) {
for (int x = 0; x < cols; x++) {
int c = img.pixels[y*cols + x];
if (brightness(c) < 128) {
m[x][y] = true; // 黒なら通れる
} else {
m[x][y] = false;
}
}
}
return m;
}
/* =========================================================
指定した(x,y)が白だったとき、近くの黒に寄せる
========================================================= */
Cell snapToMask(int x, int y) {
x = constrain(x, 0, cols-1);
y = constrain(y, 0, rows-1);
if (mask[x][y]) return grid[x][y];
int maxR = max(cols, rows);
for (int r = 1; r < maxR; r++) {
for (int dy = -r; dy <= r; dy++) {
for (int dx = -r; dx <= r; dx++) {
int nx = x + dx;
int ny = y + dy;
if (nx < 0 || nx >= cols || ny < 0 || ny >= rows) continue;
if (mask[nx][ny]) {
return grid[nx][ny];
}
}
}
}
// なければとりあえず元のセル
return grid[x][y];
}
/* =========================================================
「再帰的バックトラッキング風」で start→goal を掘る
途中で goal に着いたら止める
========================================================= */
void carveSegmentDFS(Cell start, Cell goal) {
ArrayList<Cell> localStack = new ArrayList<Cell>();
if (!start.visited) start.visited = true;
localStack.add(start);
while (!localStack.isEmpty()) {
Cell cur = localStack.get(localStack.size()-1);
// ここが「途中で止める」ポイント
if (cur == goal) {
break;
}
// マスク内だけから未訪問を探す(順序はランダム)
ArrayList<Cell> neighbors = cur.unvisitedMaskNeighbors();
if (neighbors.size() > 0) {
// ランダムに選んでDFSらしくする
int r = int(random(neighbors.size()));
Cell next = neighbors.get(r);
next.visited = true;
removeWalls(cur, next);
localStack.add(next);
} else {
// 行き止まりなので戻る
localStack.remove(localStack.size()-1);
}
}
}
/* =========================================================
残ってるマスクのセルを探す
========================================================= */
Cell findUnvisitedMaskCell() {
for (int y = 0; y < rows; y++) {
for (int x = 0; x < cols; x++) {
if (mask[x][y] && !grid[x][y].visited) {
return grid[x][y];
}
}
}
return null;
}
/* =========================================================
壁を削除(あなたの元と同じ)
========================================================= */
void removeWalls(Cell a, Cell b) {
int x = a.i - b.i;
int y = a.j - b.j;
if (x == 1) {
a.walls[3] = false;
b.walls[1] = false;
} else if (x == -1) {
a.walls[1] = false;
b.walls[3] = false;
} else if (y == 1) {
a.walls[0] = false;
b.walls[2] = false;
} else if (y == -1) {
a.walls[2] = false;
b.walls[0] = false;
}
}
/* =========================================================
セルクラス
========================================================= */
class Cell {
int i, j;
boolean[] walls = { true, true, true, true };
boolean visited = false;
Cell(int i, int j) {
this.i = i;
this.j = j;
}
void show() {
int x = i * w;
int y = j * w;
if (!mask[i][j]) {
// 通れないところ(背景)
noStroke();
fill(255);
rect(x, y, w, w);
stroke(220);
noFill();
rect(x, y, w, w);
return;
}
stroke(0);
if (walls[0]) line(x, y, x + w, y);
if (walls[1]) line(x + w, y, x + w, y + w);
if (walls[2]) line(x + w, y + w, x, y + w);
if (walls[3]) line(x, y + w, x, y);
if (visited) {
noStroke();
fill(220, 190, 255, 110);
rect(x, y, w, w);
}
// 見やすくするなら中継点を色付けしてもいい
if (this == waypoints[0]) {
noStroke(); fill(0,200,0,200); rect(x+1, y+1, w-9, w-9);
}
if (this == waypoints[1]) {
noStroke(); fill(200,200,0,200); rect(x+1, y+1, w-9, w-9);
}
if (this == waypoints[2]) {
noStroke(); fill(0,200,200,200); rect(x+1, y+1, w-9, w-9);
}
if (this == waypoints[3]) {
noStroke(); fill(200,0,0,200); rect(x+1, y+1, w-9, w-9);
}
}
// draw() で使う「マスク内だけ」のneighbors
Cell checkNeighborsMask() {
ArrayList<Cell> ns = unvisitedMaskNeighbors();
if (ns.size() > 0) {
int r = int(random(ns.size()));
return ns.get(r);
}
return null;
}
// マスク内かつ未訪問の隣を全部返す
ArrayList<Cell> unvisitedMaskNeighbors() {
ArrayList<Cell> ns = new ArrayList<Cell>();
if (i > 0) {
if (mask[i-1][j] && !grid[i-1][j].visited) ns.add(grid[i-1][j]);
}
if (i < cols-1) {
if (mask[i+1][j] && !grid[i+1][j].visited) ns.add(grid[i+1][j]);
}
if (j > 0) {
if (mask[i][j-1] && !grid[i][j-1].visited) ns.add(grid[i][j-1]);
}
if (j < rows-1) {
if (mask[i][j+1] && !grid[i][j+1].visited) ns.add(grid[i][j+1]);
}
return ns;
}
}