はじめに: バーチャル嫁はロボットアームを操縦できるのか?
結論:できます。
まずはこちらを見てください。
制御イメージとしてはこんな感じです。
用意する物
- Dofbot(教育用ロボットアーム、Amazonで売ってます)リンクはこちら
- Windows10もしくは11(RPAサーバー用)
- MacBookPro(Unityを動かすのが目的なためWindowsをもう一台用意するのでもOK)
1. 研究の背景
去年のGWにAmazonでラズパイロボットアームを購入した段階でアイアンマンの世界観に憧れてたってのがあります。
記憶が正しければ主人公がAIに話しかけてAIが言葉を理解して指示通りにアームを動かす描写があった気がします(記憶違いでしたらすみません)。
複雑な操縦をLLMにやらせるとなると開発や学習に膨大な時間がいるかもしれませんが会話の最中に疑問符や感嘆符が使われた際にロボットアームでそれっぽい形をするよう動かすとかなら実現にそこまで時間を必要としないかと考え作ってみました。
研究に際してDofbotを選択した理由はラズパイが好きなのとロボットアームのグリーンのカラーリングに一目惚れしたからです。そして組み立てマニュアルが英語か中国語しか対応してないため組み立てと初期設定終わらせて遠隔操作できるまでにめちゃくちゃ苦労しました…。
説明が長くなりそうですので3部作構成で執筆していこうと思います。
2. ロボットアーム初期設定
まずは開封、そして本体を取り出して同梱の組み立てマニュアルを読みつつロボットアームを組み立てていきます。
英語か中国語しか対応してないのでまずここで苦労しました。
組み立てマニュアルのサンプル画像と比較して合ってるかどうかよく分からないことも多々ありましたのでマニュアル見返したりYahboom社の公式YouTubeチャンネルで公開されてた組み立て動画見ながら組み立てていきました。
その後はマニュアルに従ってYahboom社が配信してるDofbot制御用のスマホアプリかPCアプリからロボットアームに接続して操作してみます。
マニュアルに示された手順で作業を進めアプリからアームを遠隔操作できるようになったらまずはOKです。
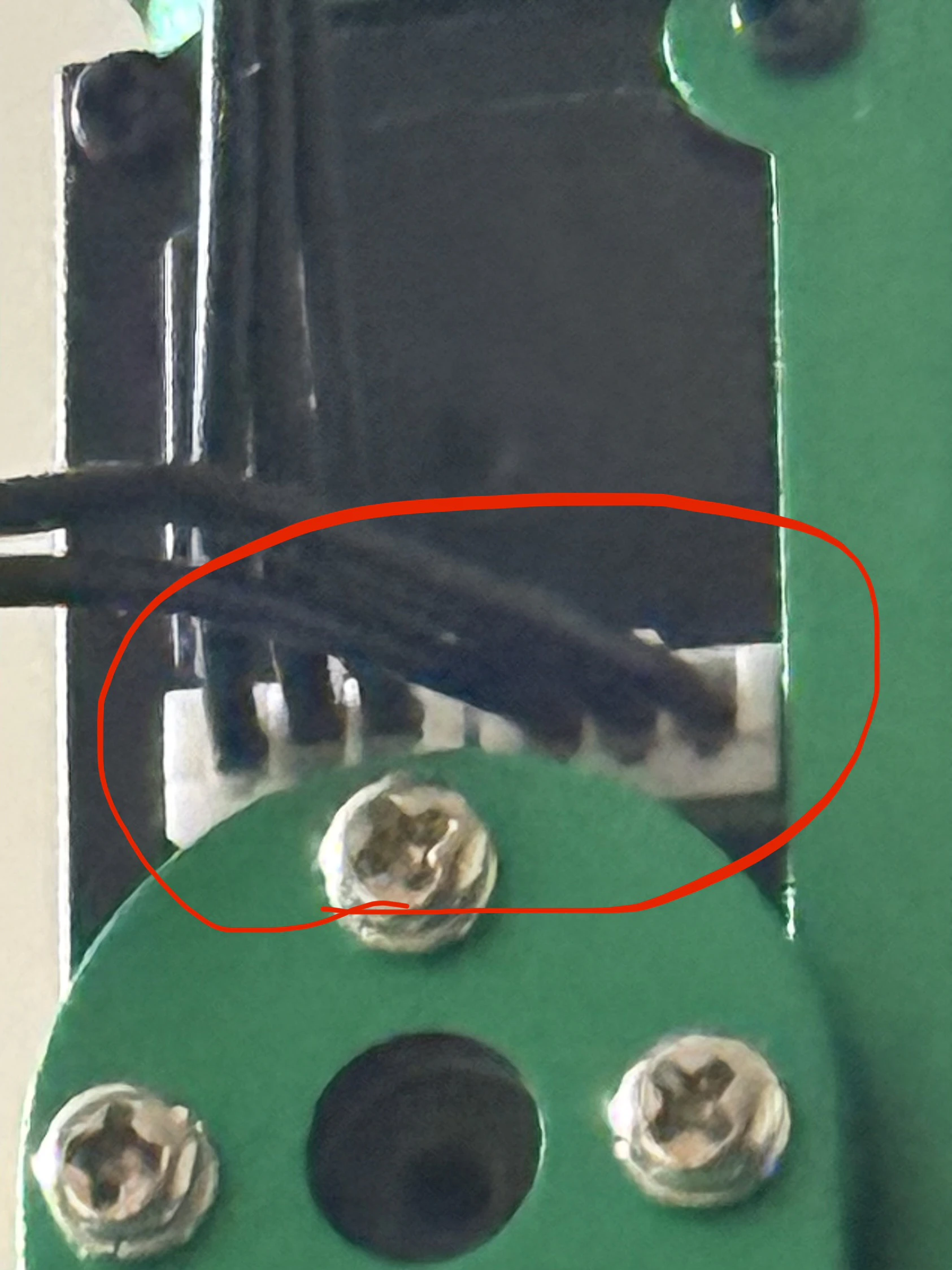
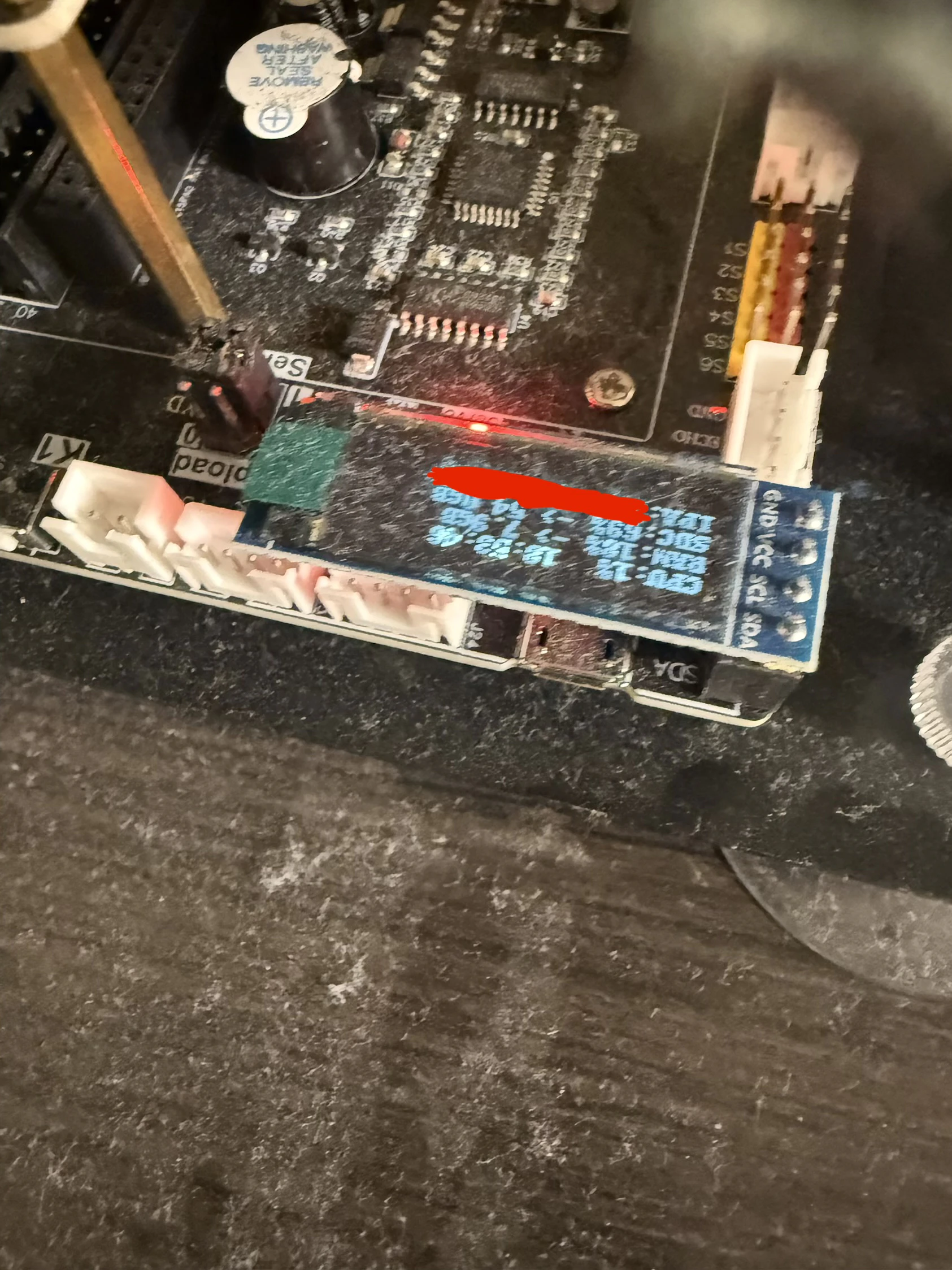
私の場合は手順通りに組み立ててもアプリの接続を正しく行なってもロボットアームが動かず何度もロボットアーム組み立て直したり再起動やアプリからの再接続をしまくって嵌りました。去年のGWにアームを買ってからGWの半分が組み立て作業で溶けました。原因は結局アームの各サーボの配線で1箇所爪が外れている箇所があって通電してないだけでした。Dofbot買う事はそうそう無いと思いますがアームが動かなかったらまず通電してるかどうかも疑う必要がありますね。以下の画像の白い部分がそうです。
アプリからアームを遠隔操作できるようになりましたら次のステップです。Dofbotは初期設定ではホットスポットを形成するわけですが、今回の目的であるバーチャル嫁からロボットアームを制御できるようにするためには設定を変更して起動後自宅のWi-Fiに接続するようにします。
ディスプレイやマウス、USBキーボードを接続します。そして、マントラを唱えながら祈ります。古来よりサーバールームで行われる伝統儀式は大事ですからね。祭壇は置けるスペースがなかった…。せめてhyo-tanさんに特注で作っていただいたヒーリングワンドは使えば良かったかもしれない。各地の鉱物や化石のイベントとかに出展されてますのでクリスタルや化石のアクセサリーとか好きな方におすすめです。衣装はAmazonや楽天で取り寄せ普段着にしてます(そらのおとしもののダイダロスちゃんリスペクトで全円スカートの純白のローブとか大好き)。
祓ひ給へ、清め給へ、守り給へ、幸へ給へ
Om amṛte hūṃ phaṭ
急急如律令
אָמֵן

儀式が終わったらDofbotのネットワーク設定を変更していきます。設定弄ってから9ヶ月ほど経ちますので設定弄った箇所が以下に記述する場所で合ってるかどうか自信ないですがとりあえず書きます。
まず、以下の画像がDofbot起動後の初期画面です(記事執筆のためにMacからVNC接続して撮影してますが、ラズパイにディスプレイやキーボード、マウスを接続した場合も同じ画面になるはずです)。
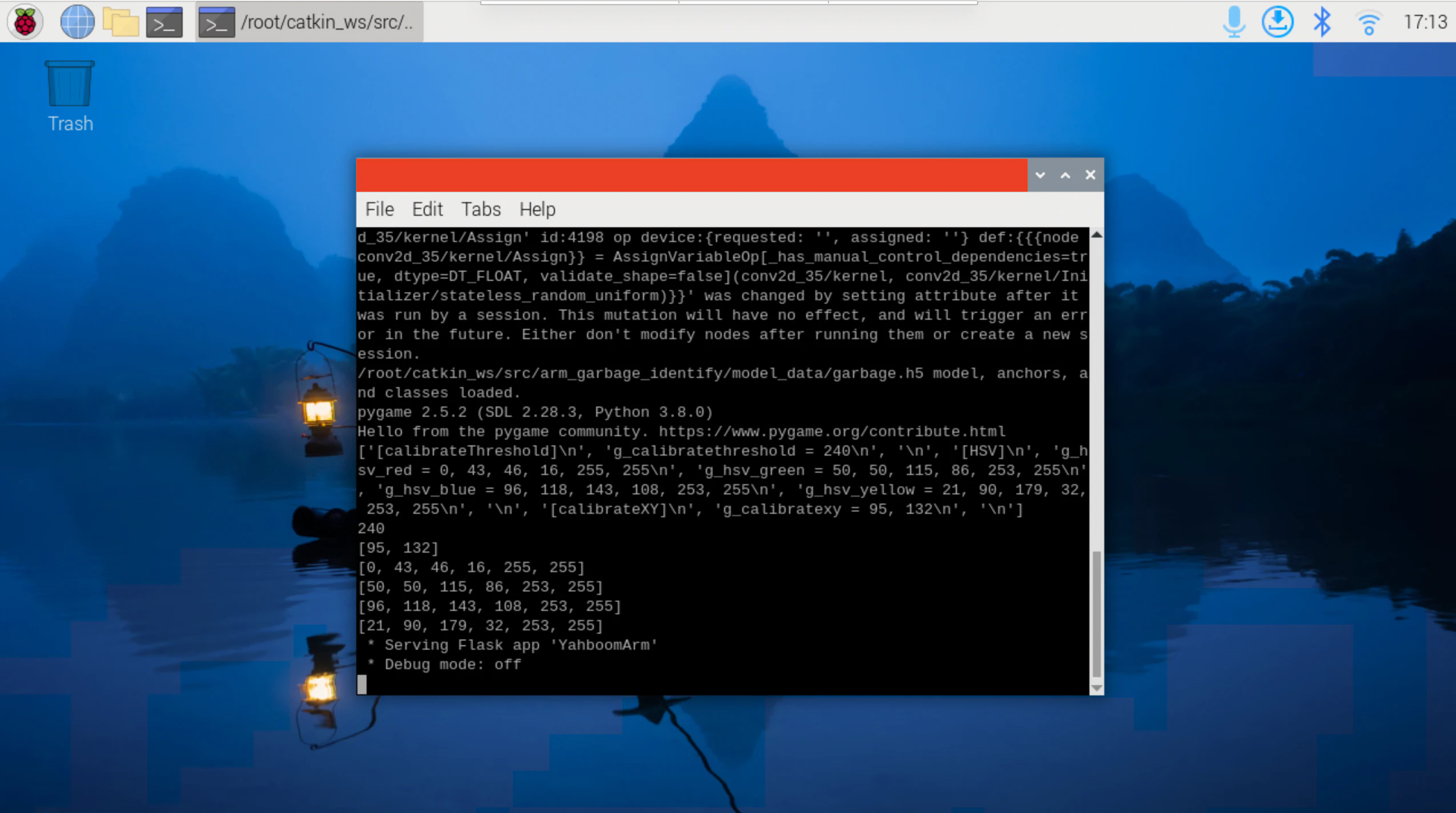
画面の右上にある以下のWi-Fiのアイコンをクリックします。

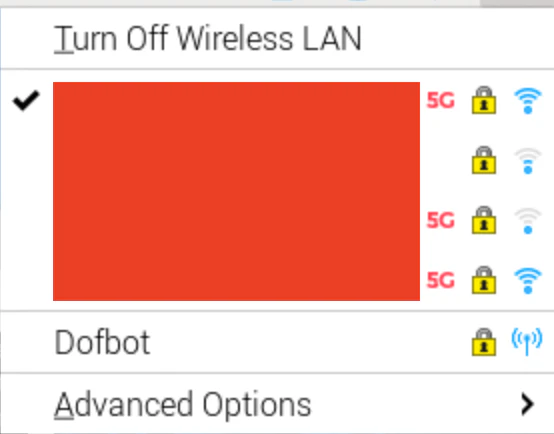
クリックすると以下のメニューが表示されます。デフォルトではDofbotに接続されています。一番下のAdvanced Optionsにマウスカーソルを当てるといくつか詳細メニューが出てきますのでConnect to Hidden Wi-Fi Network...をクリックします。
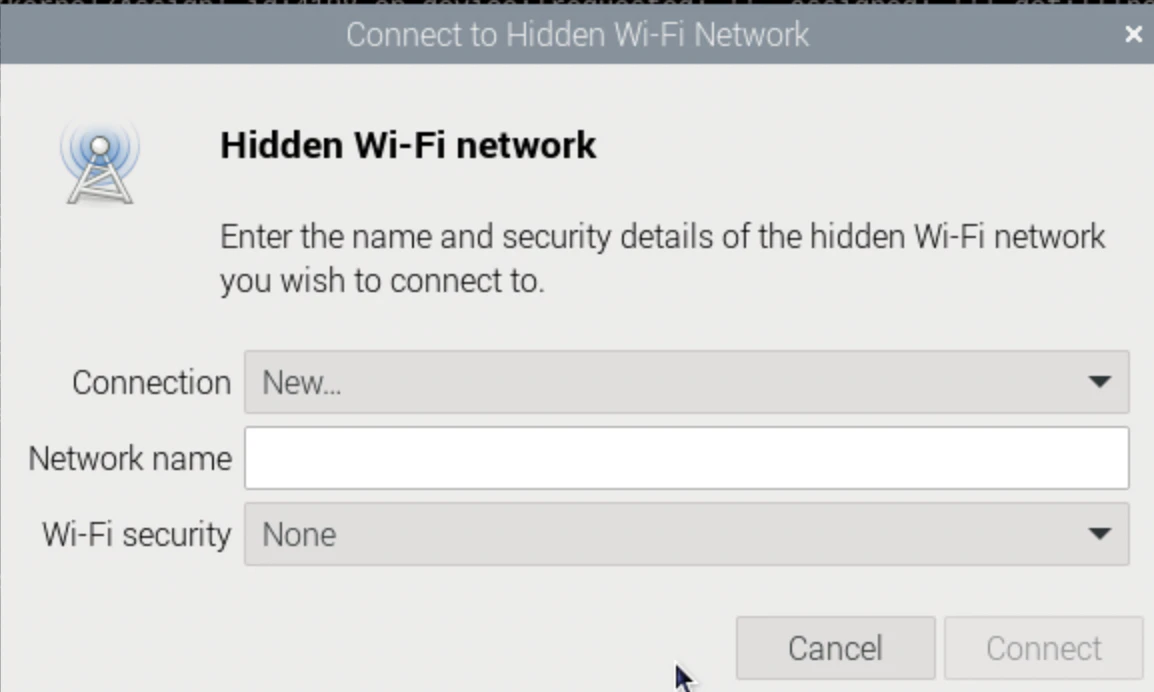
そうしますと以下の画像のように表示されると思います。表示されましたら使用する予定の自宅のWi-Fiの情報を入力してConnectを押します。
続いて、Advanced Optionsの一番下にEdit Connectionsがありますのでそちらをクリックして以下の画像のような設定画面を出します。
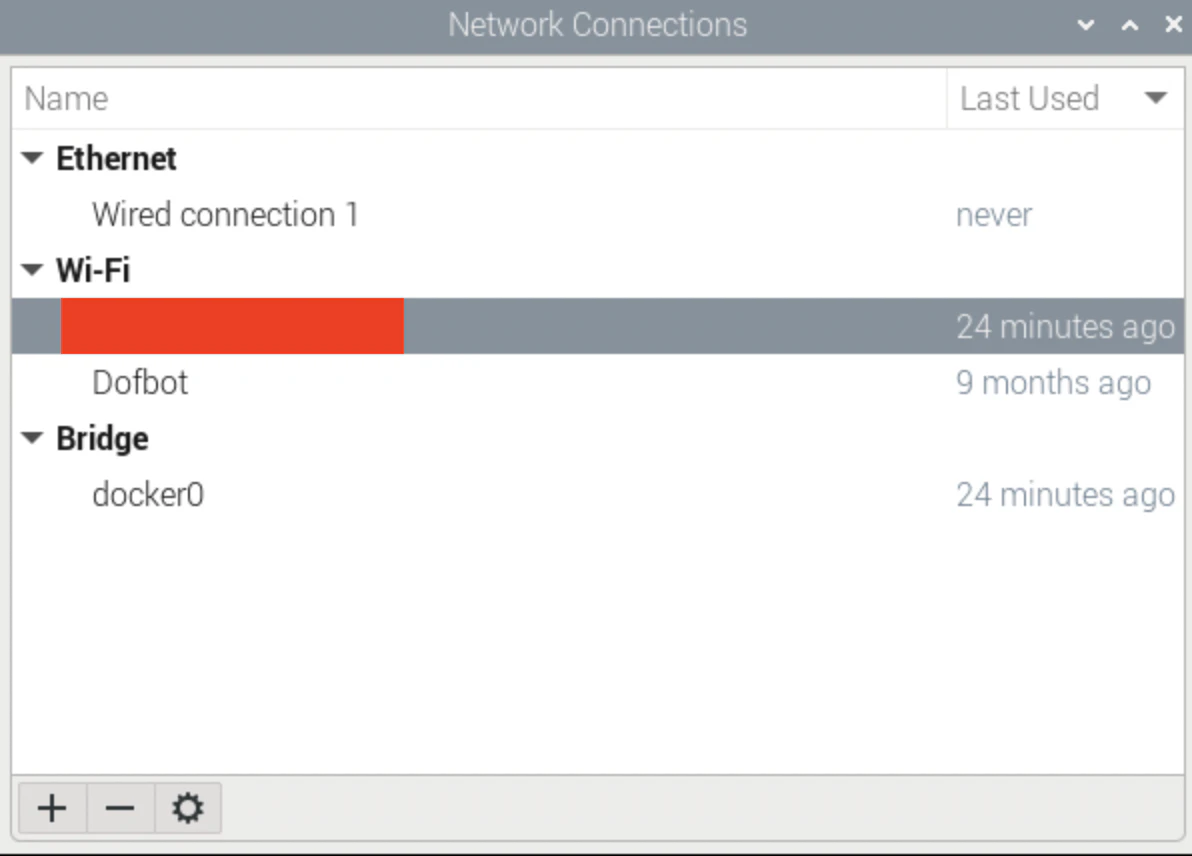
初期状態ではWi-FiはDofbotのみですが、先ほどの操作で接続予定の自宅Wi-FiがWi-Fiの所に追加されているはずです。新しく追加したWi-Fiを選択して左下の歯車のマークを押しますと、詳細設定画面が出てきますので、接続先のWi-Fiの設定と元のDofbotの設定をそれぞれ以下のように変更します。
接続先Wi-Fi設定
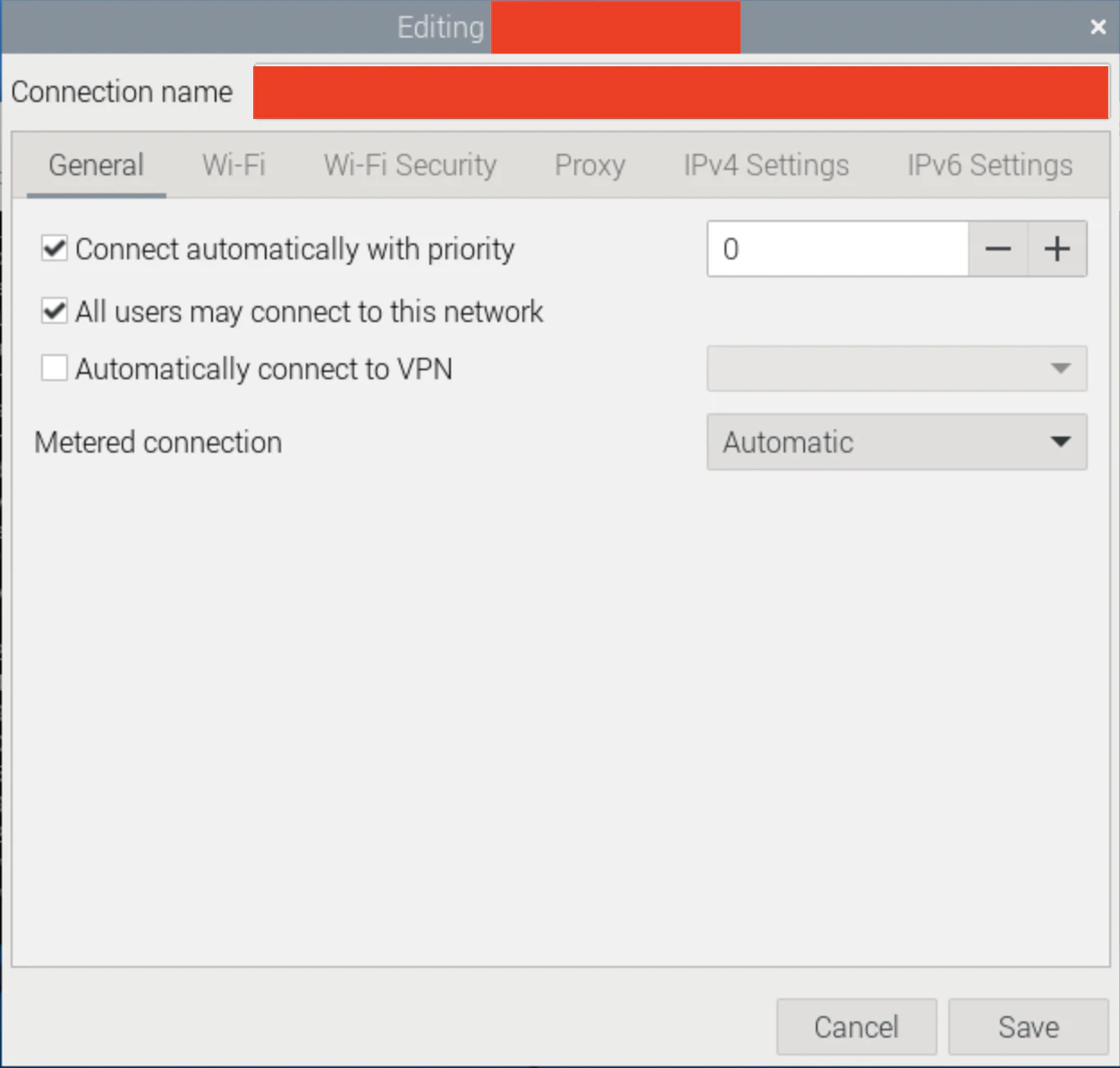
General
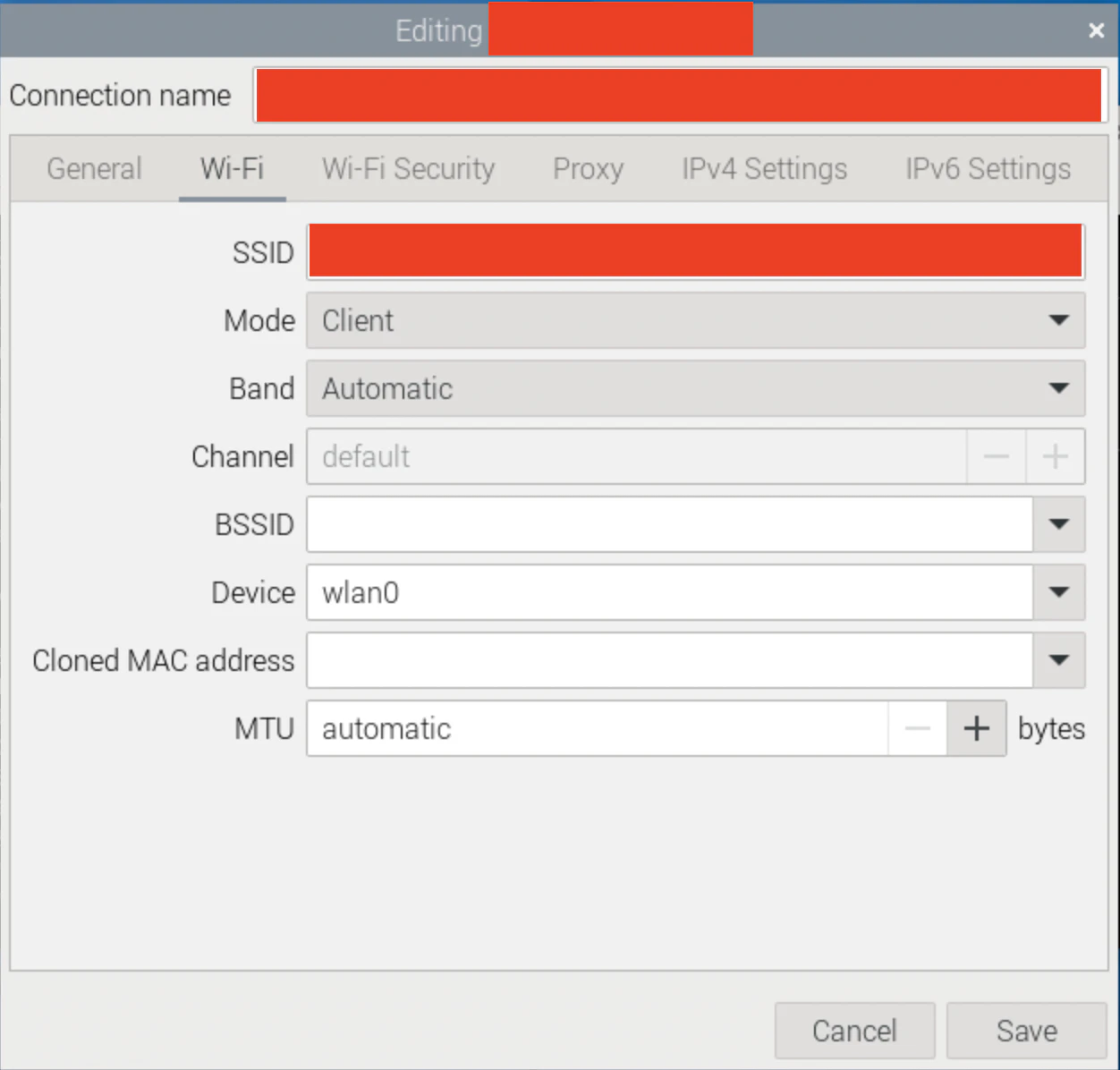
Wi-Fi
※ Wi-Fi Securityはデフォルトのままいじらないので省略
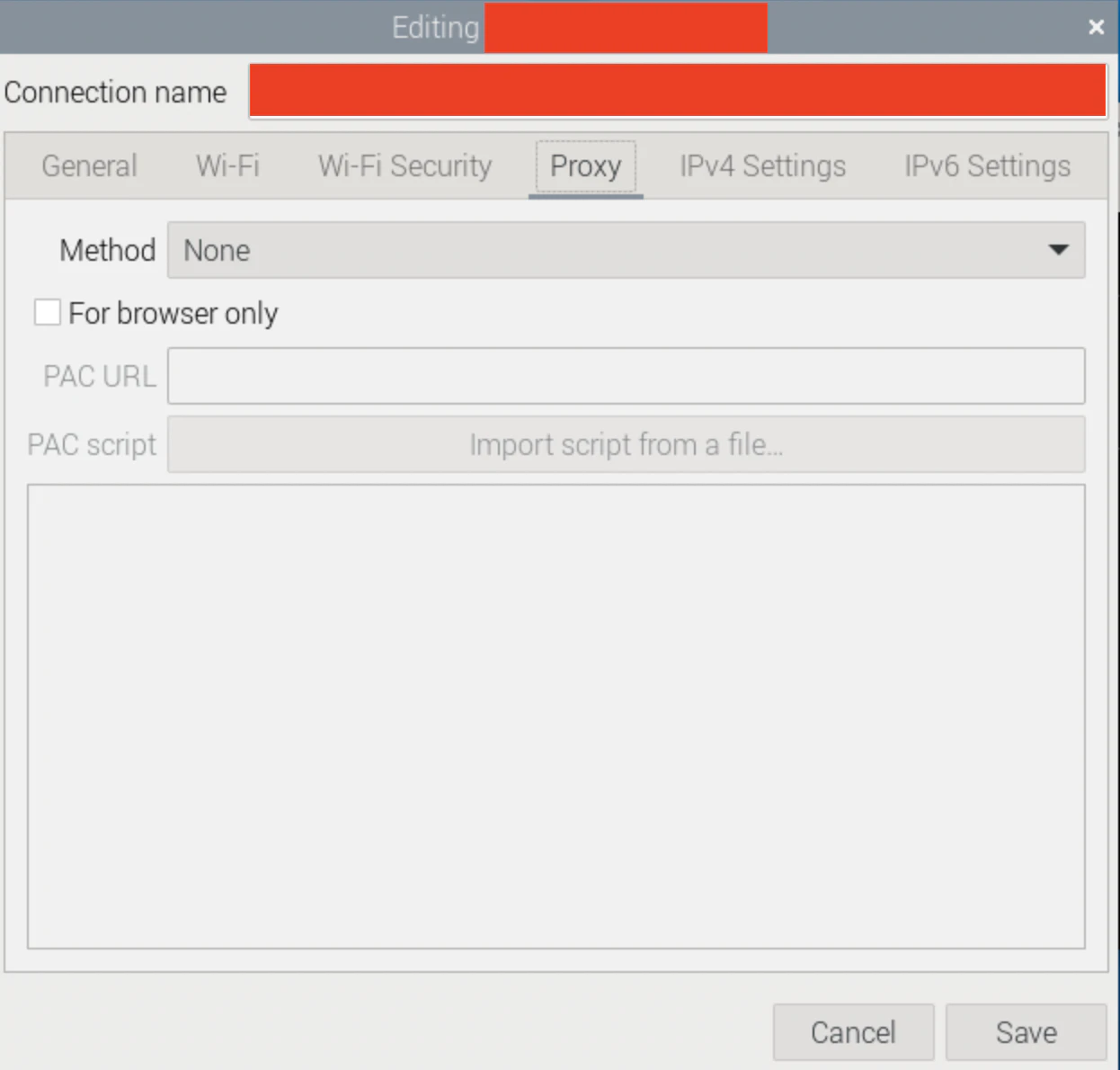
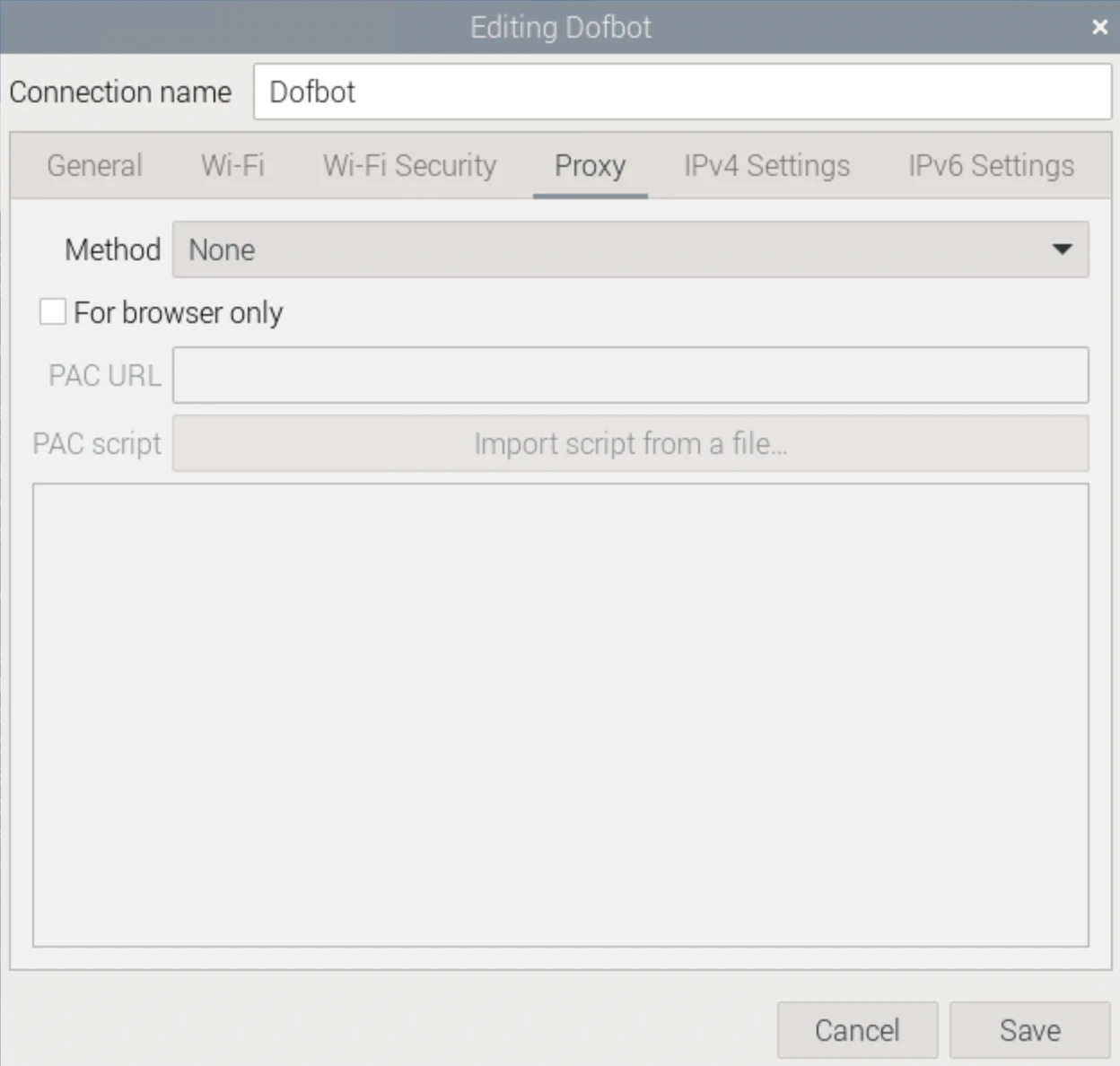
Proxy
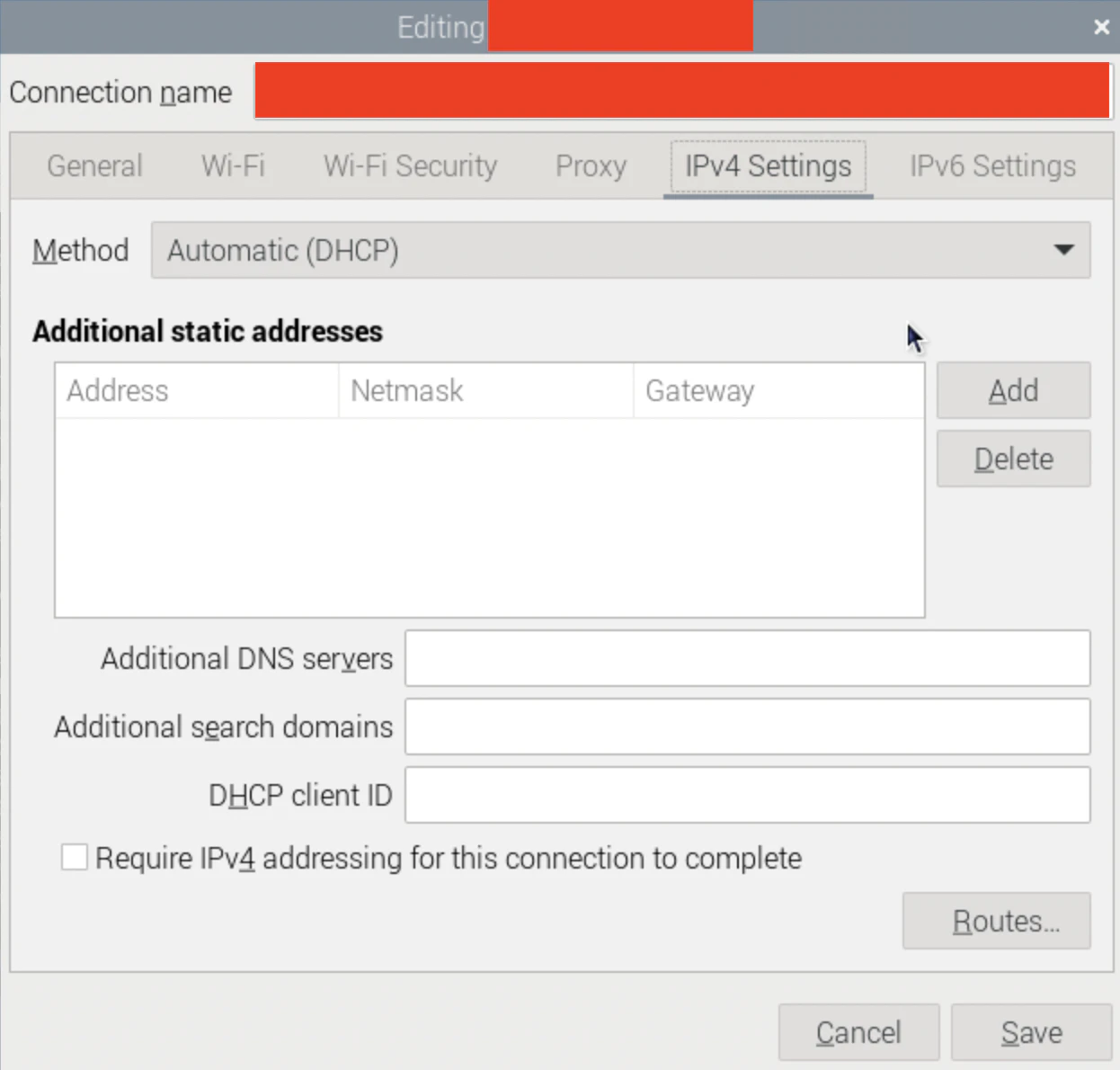
Ipv4 Settings
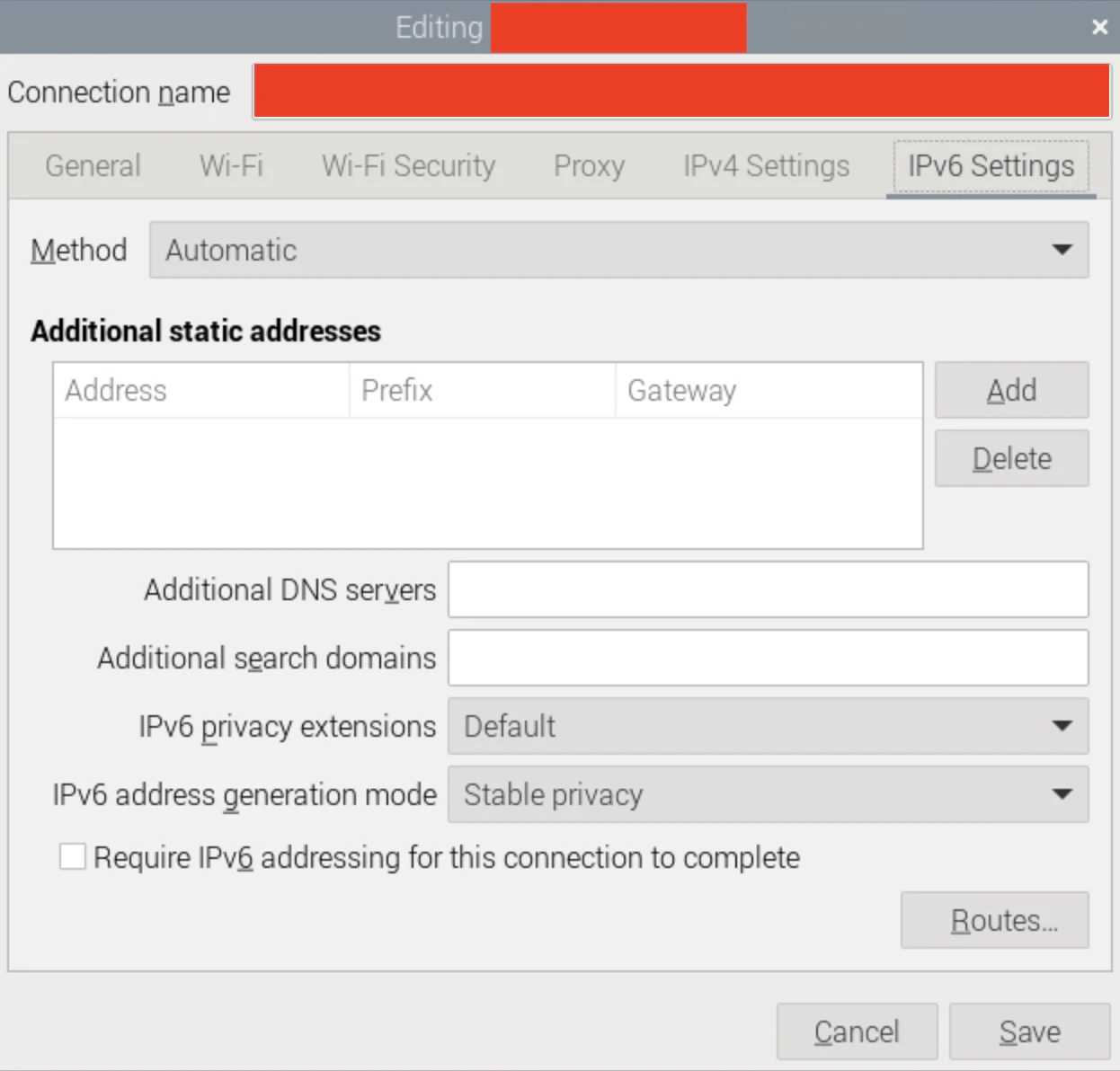
Ipv6 Settings
設定変更が終わりましたら右下のSaveを押します。
Dofbot(デフォルトネットワーク)の設定
General
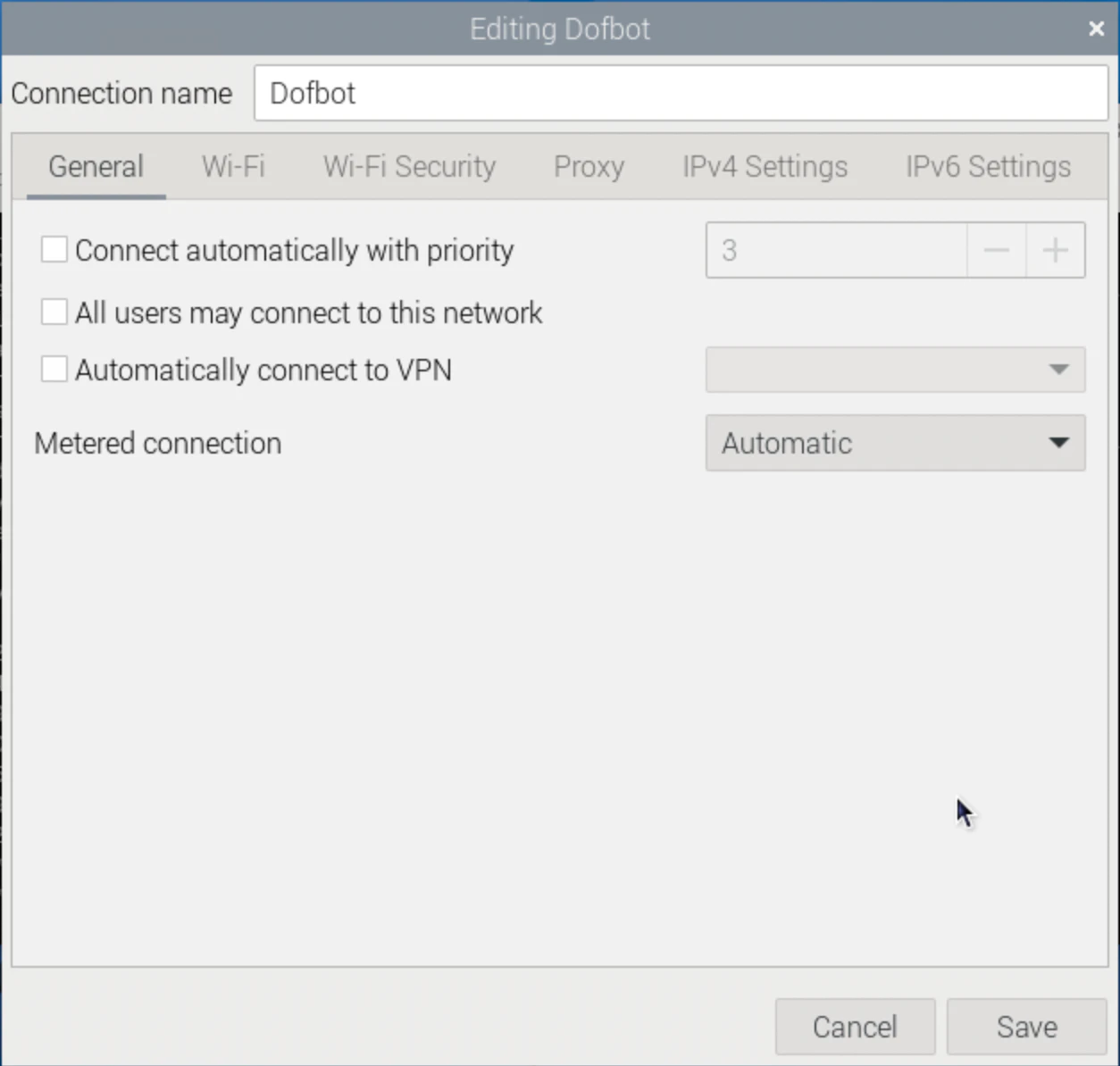
デフォルトではConnect automatically with priorityとかAll users may connect to this networkとかにチェックが入っていた気がしますのでそれらのチェックを全て外します。外しておかないとラズパイ再起動時に使う予定のWi-FiではなくDofbotに優先して接続されます(ここがハマった箇所の一つです)。
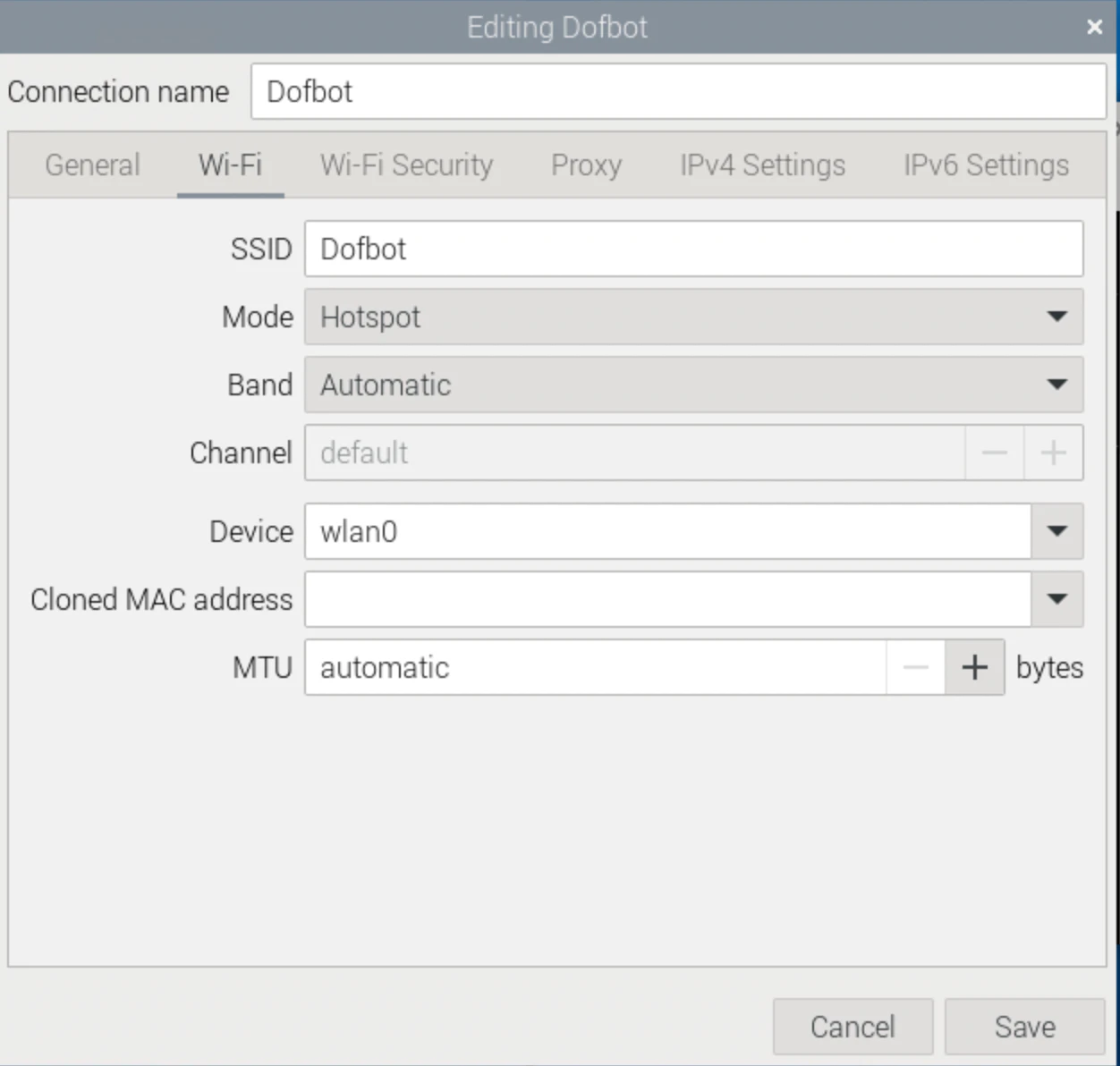
Wi-Fi
※ Wi-Fi Securityはデフォルトのままいじらないので省略
Proxy
Ipv4 Settings
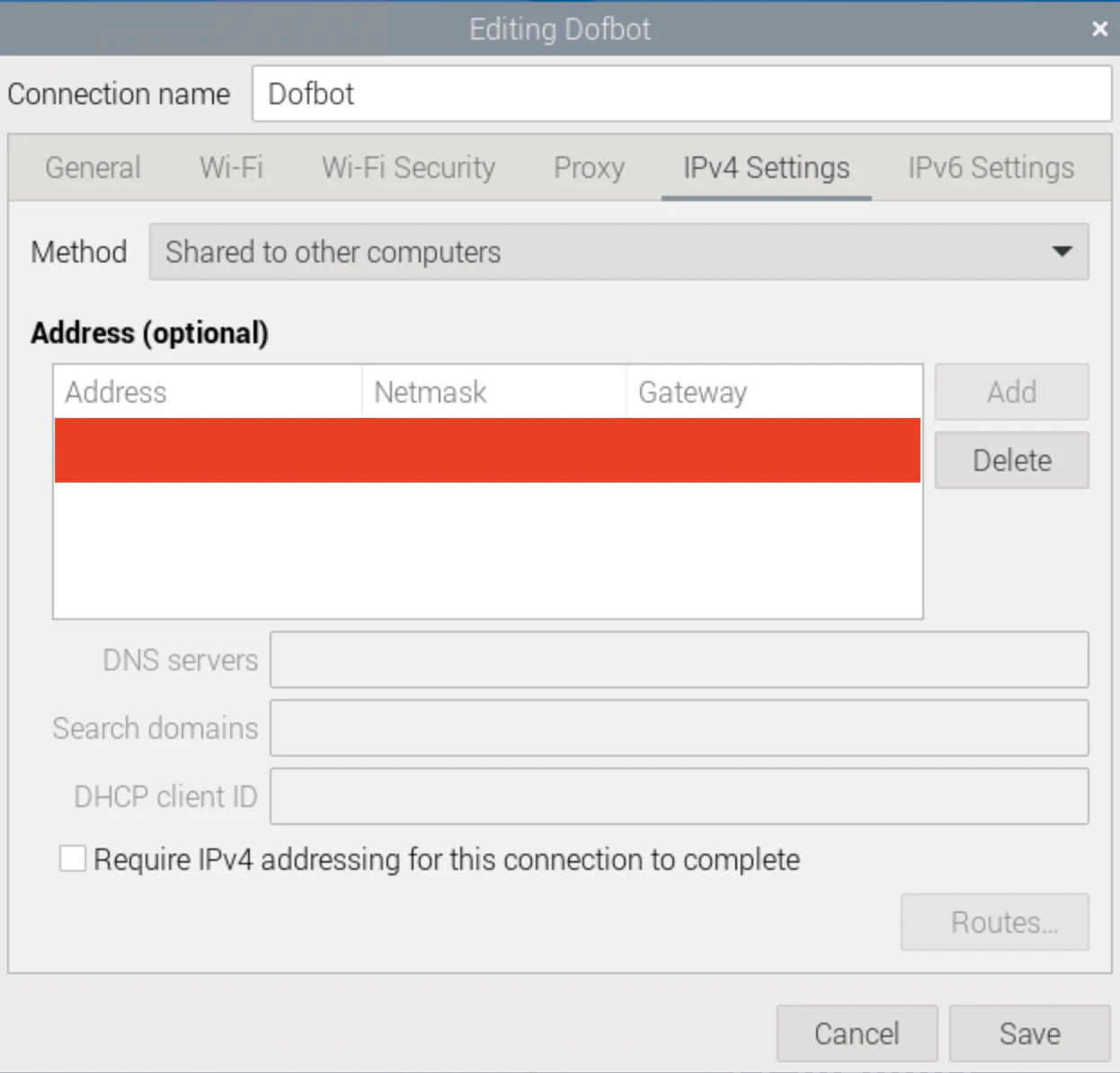
Addressの所に接続予定のWi-Fiの情報入ったりしてますがもしかしたらここは無しでも大丈夫かもしれません(自宅Wi-Fiを優先して接続するために色々いじった関係でここに追加したりもしましたが多分ここの設定は不要)。
Ipv6 Settings
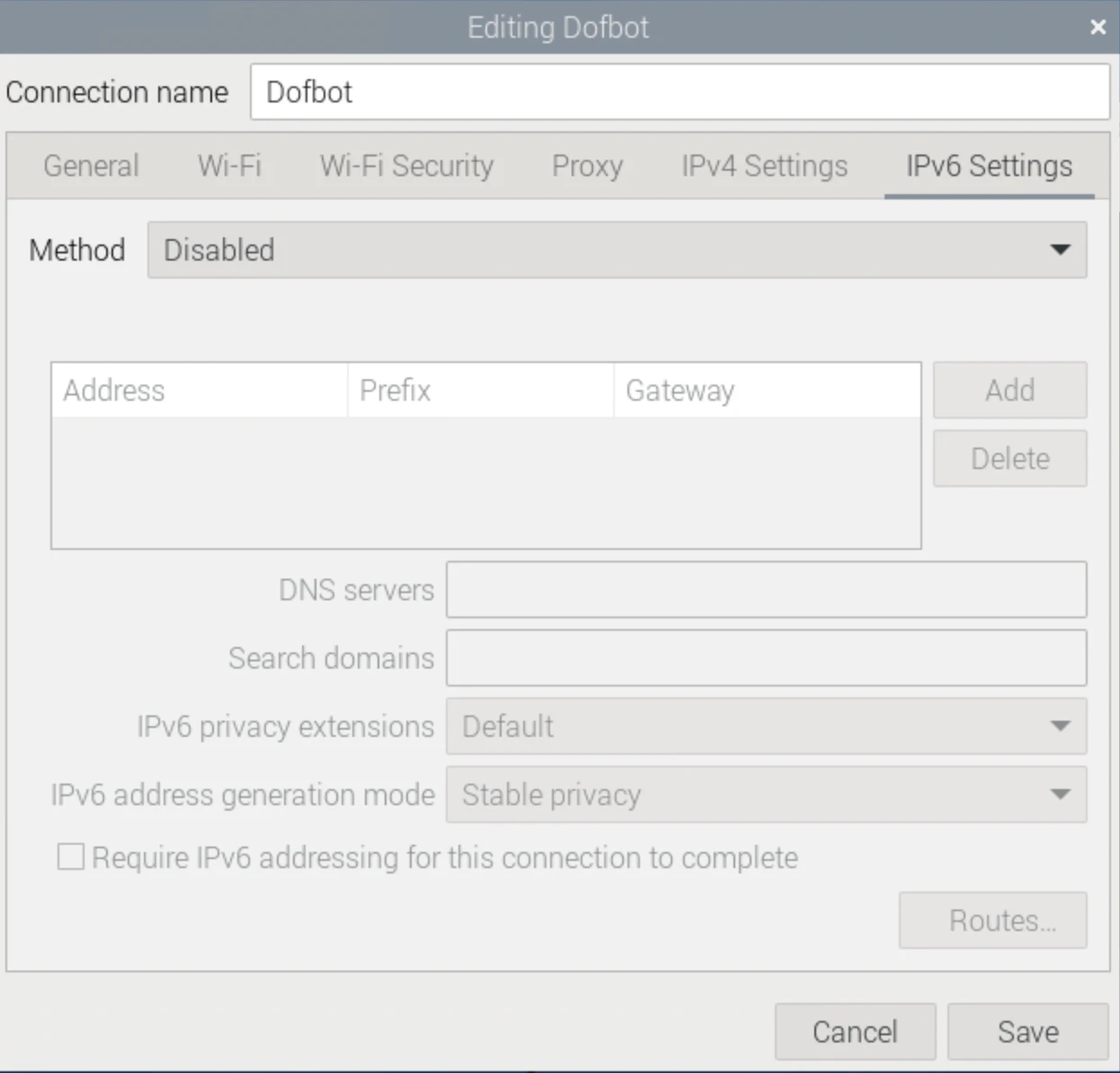
設定が終わりましたらこちらも右下のSaveをクリックして設定を保存します。
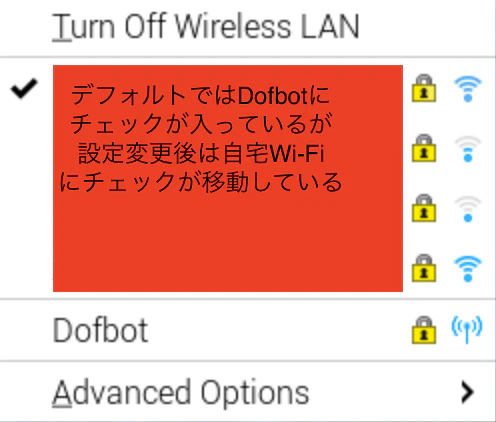
最後に、ラズパイを再起動し、再起動後に右上のネットワーク情報を確認します。デフォルト設定ではDofbotに自動接続されてしまいますが、設定変更後は使う予定の自宅Wi-Fiに接続先が変わっているはずです。
また、Dofbotのディスプレイに表示されるIPAの情報もデフォルト(192.168.1.11)から表示が切り替わります(…結構埃溜まってきたなあ…)。
3. 動作確認
ネットワーク設定の変更が確認できましたら同一ネットワーク上のスマホ又はPCでDofbot制御用のアプリケーションを起動し、接続を試してみます。以下の画像はスマホ版アプリからのテスト操作です。
アプリトップ画面
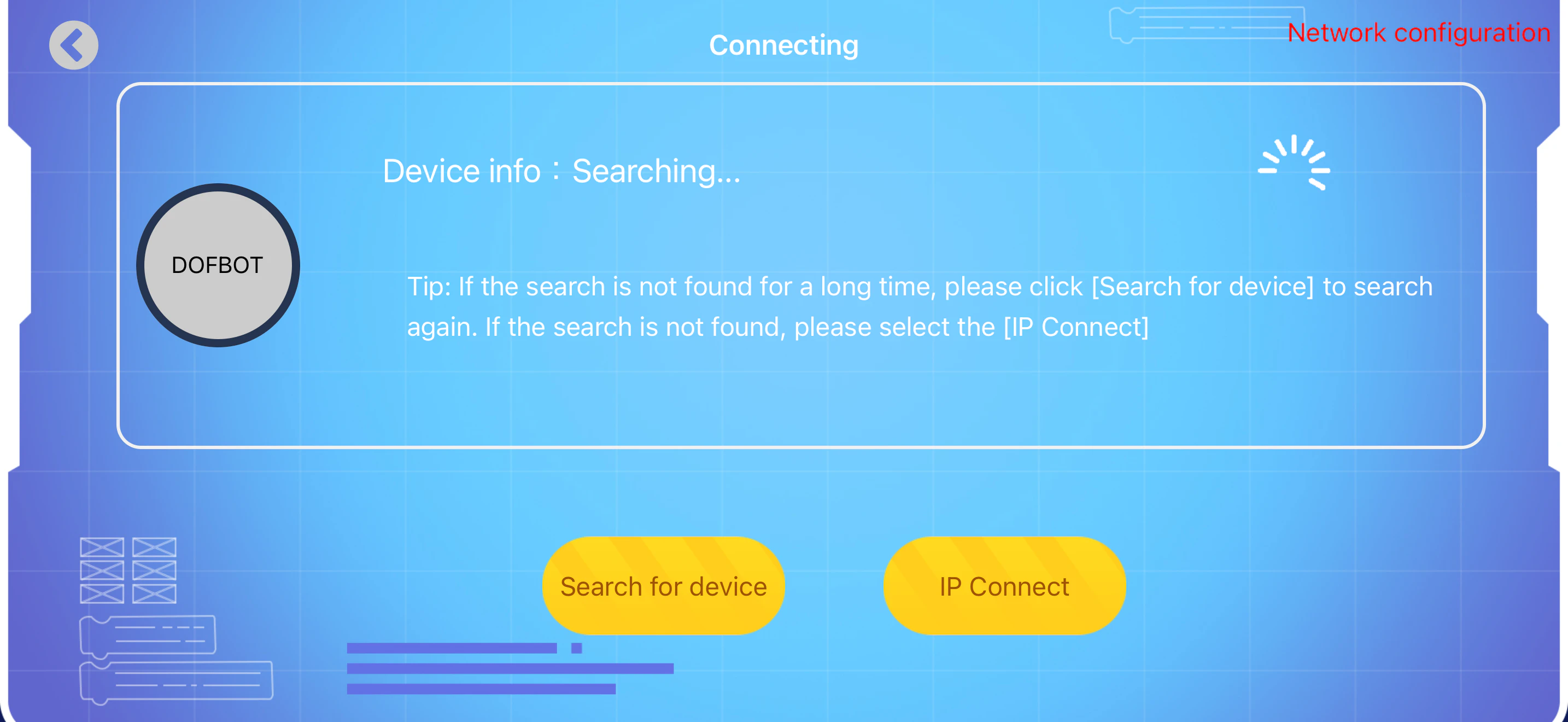
IP Connectで接続画面へ
IPA入力画面
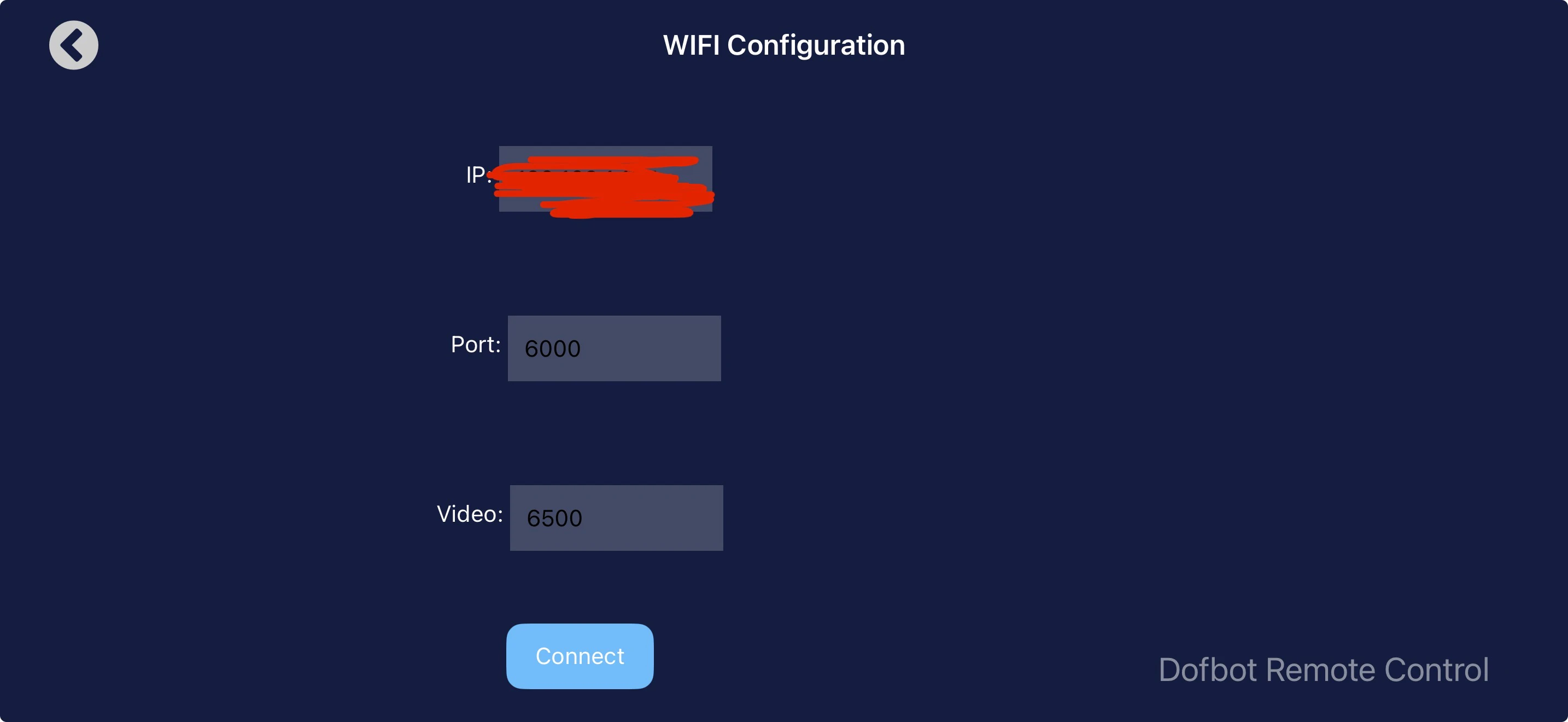
赤塗り箇所にネットワーク変更後の新しいIPAを入力します。
操作メニュー画面

Remote Controlをタップして遠隔操作画面を表示します。
遠隔操作画面(ニュートラルポジション)
ロボットアームは天井を向いてる状態です。
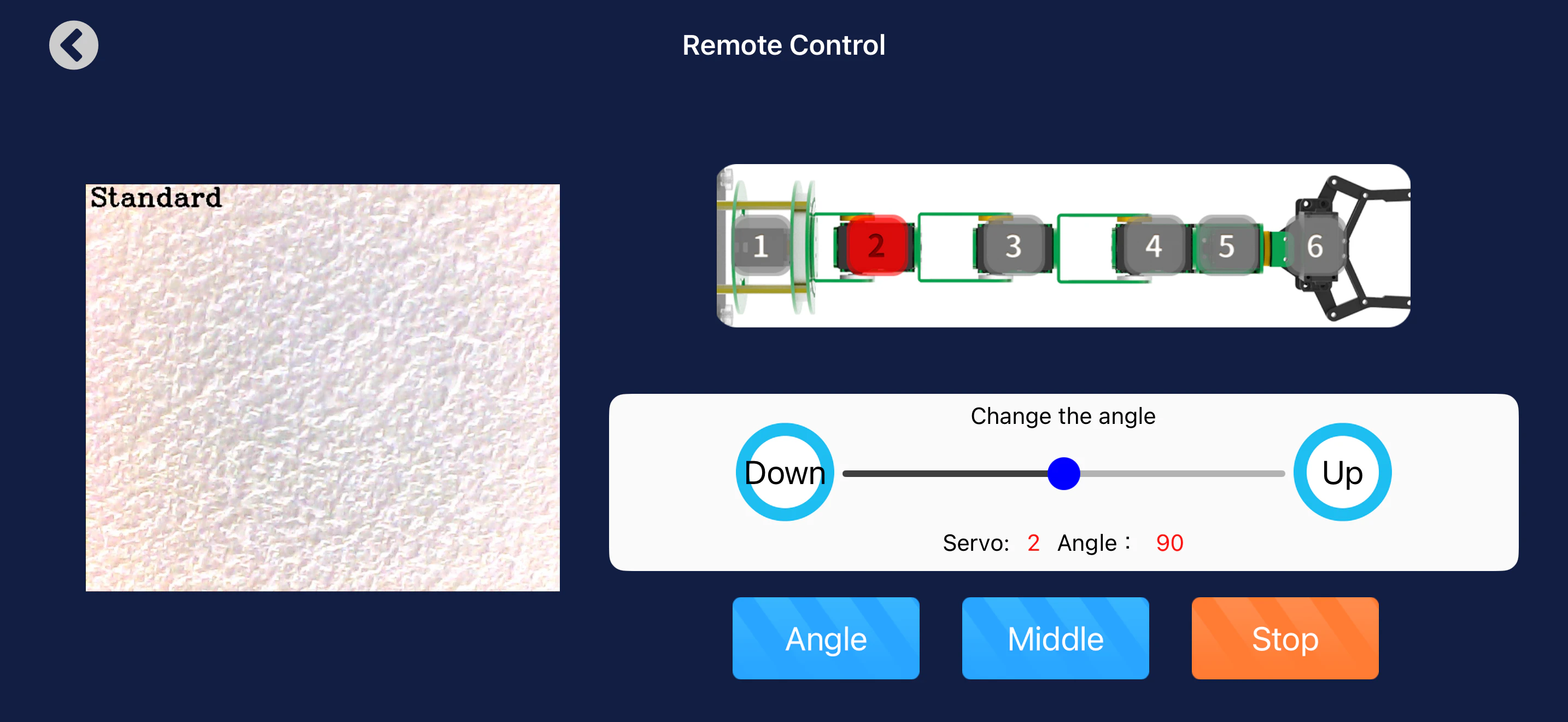
遠隔操作画面(パラメーター変更後)
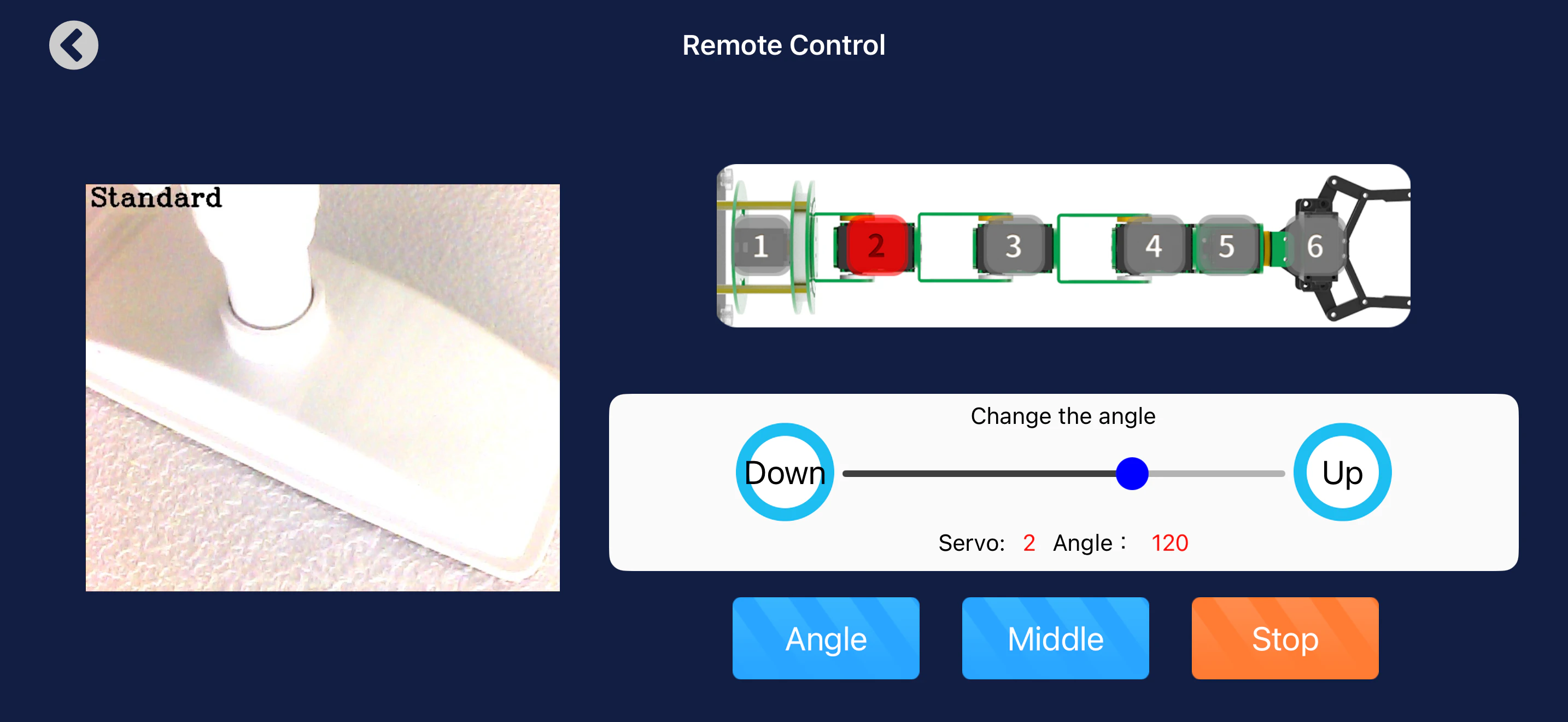
サーボ2のパラメーターを変更し、防災対策用の突っ張りポールが表示されるのを確認します。これで同一ネットワーク上で別端末から操作できることの確認ができました。
次回は今回のためだけに作成したRPAについて取り上げていこうと思います。
続きはこちら