やったこと
RaspberryPi用MC33886を使ってDCモータの回転数を制御した。
構成
- Raspberry Pi
- MC33886
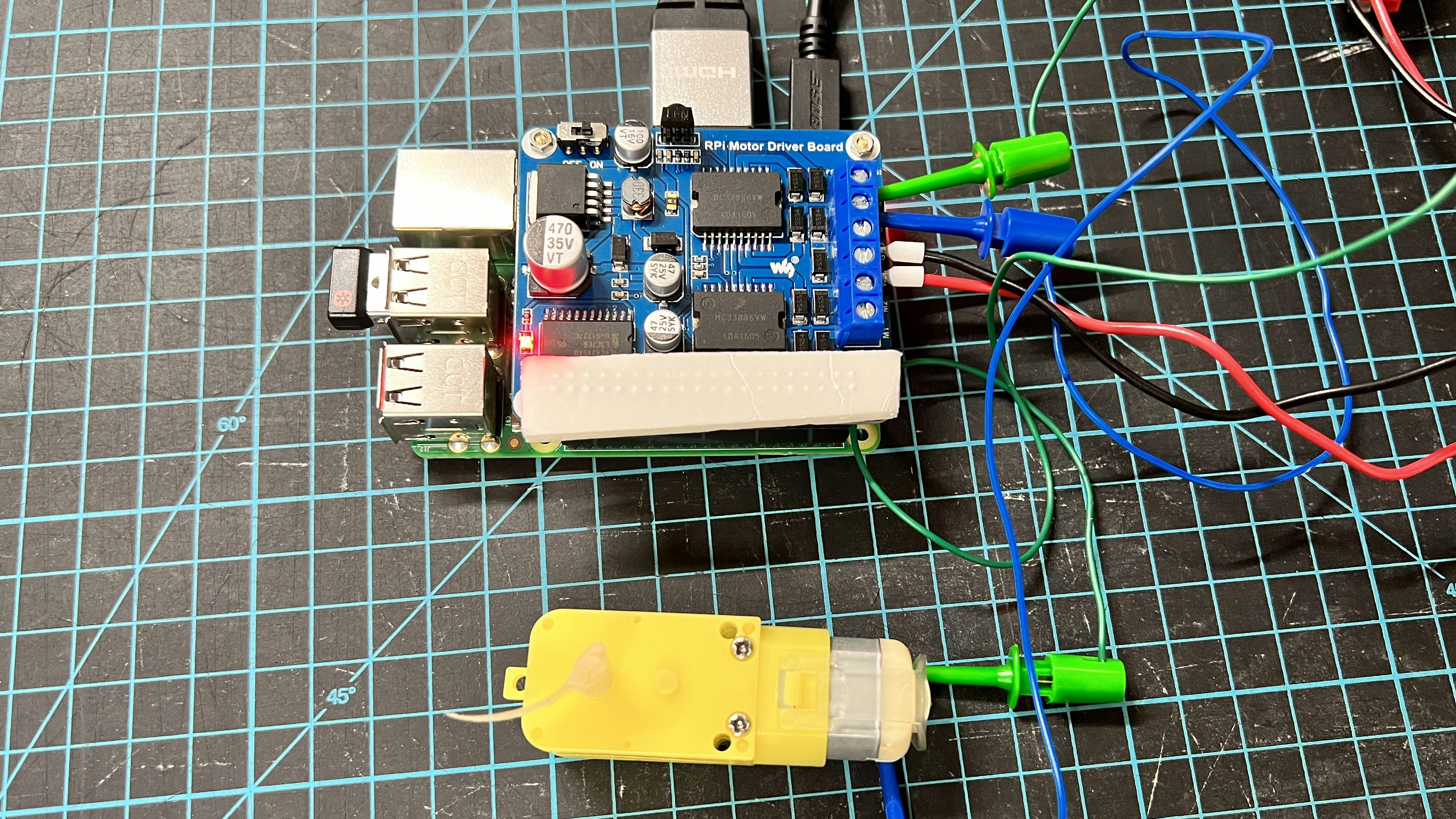
設定と動作
- 基本はwiki通りに進めると動く。
RPi Motor Driver Board - ChangeDutyCycle関数を用いることで、PWMの波形を出力している途中でもデューティ比を変更することができます
DC_sample_cord.py
from tkinter import E
import RPi.GPIO as GPIO
from time import sleep
import time
PWMA1 = 6
PWMA2 = 13
PWMB1 = 20
PWMB2 = 21
D1 = 12
D2 = 26
class DC_motor_drive():
def __init__(self):
#GPIOのポート番号を使用
GPIO.setmode(GPIO.BCM)
#モーターで使うGPIOをセットアップ
GPIO.setup(PWMA1,GPIO.OUT)
GPIO.setup(PWMA2,GPIO.OUT)
GPIO.setup(PWMB1,GPIO.OUT)
GPIO.setup(PWMB2,GPIO.OUT)
GPIO.setup(D1,GPIO.OUT)
GPIO.setup(D2,GPIO.OUT)
#PWMの設定
self.motor1 = GPIO.PWM(D1,100)
self.motor2 = GPIO.PWM(D2,100)
self.motor1.start(0)
self.motor2.start(0)
def sample_process(self,speedA,speedB):
print('start sample_process')
self.motor1.ChangeDutyCycle(speedA)
self.motor2.ChangeDutyCycle(speedB)
print('speedA:{},speedB:{}'.format(speedA,speedB))
GPIO.output(PWMA1,1)
GPIO.output(PWMA2,0)
GPIO.output(PWMB1,1)
GPIO.output(PWMB2,0)
# モーターを2秒動かす
time.sleep(2)
def move_process(self,speedA,speedB):
print('start move_process')
self.motor1.ChangeDutyCycle(speedA)
self.motor2.ChangeDutyCycle(speedB)
print('speedA:{},speedB:{}'.format(speedA,speedB))
# モーターを動かす。
GPIO.output(PWMA1,1)
GPIO.output(PWMA2,0)
GPIO.output(PWMB1,1)
GPIO.output(PWMB2,0)
def stop_process(self):
# モーターを停止。
GPIO.output(PWMA1,0)
GPIO.output(PWMA2,0)
GPIO.output(PWMB1,0)
GPIO.output(PWMB2,0)
def cleanup(self):
GPIO.cleanup()
print('Process End')
time.sleep(1)
def drive_main():
motor_drive= DC_motor_drive()
#()内には0~100のスピードを指定
speedA=50
speedB=50
try:
print('--- start program ---')
while True:
motor_drive.sample_process(speedA,speedB)
print('speed UP:{}'.format(speedA))
if speedA < 100:
speedA+=10
else:
speedA=speedA-80
print('speed reset'.format(speedA))
except KeyboardInterrupt:
print("intrrupted Ctrl-C")
pass
finally:
GPIO.cleanup()
print('--- stop program ---')
motor_drive.cleanup
time.sleep(1)
if __name__ == '__main__':
drive_main()
以上