はじめに
2025年は宇宙界隈にとって歴史的な1年でした。なんといってもSpaceXとBlue Originという2大民間宇宙開発企業がロケット開発にしのぎを削り、革新的な宇宙輸送技術の開発を圧倒的に推し進めています。
下表はGPT-5にまとめてもらった両社が開発を進めている主力ロケットの特徴です。SpaceXが開発するStarship、Blue Originが開発するNew Glennはともに再利用性を考慮した輸送技術であり、共通するところは、推進剤にメタンを活用した液体ロケットエンジンを採用している点に加えてロケットのサイズがともに大きいという点になります。
| 特徴 | Starship | New Glenn |
|---|---|---|
| 再利用方式 | 完全再利用(両段) | 部分再利用(1段のみ) |
| エンジン燃料 | メタン/酸素(Methalox) | メタン/酸素(Methalox) |
| 輸送能力 | 圧倒的(100〜150t) | 商用衛星向けに最適化(45t) |
| サイズ | 121m で現役最大級 | 98m と大型だが Starship より小ぶり |
| ミッション | 月・火星、人類移住、軌道補給 | 衛星輸送、政府ミッション |
| コンセプト | 大量輸送の“完全再利用型輸送インフラ” | 信頼性と再使用性の“商用打ち上げインフラ” |
そして、現在では両社以外にも世界中の様々な宇宙スタートアップにて日夜挑戦が続けられています。
我らが日本においても基幹ロケットであるH3やイプシロン以外に、スタートアップや大企業がロケット市場に参入し挑戦しています。
このように昨今は国内外問わず宇宙開発全盛期となっていますが、技術開発のためには莫大な資金と人材、そして何よりも場所が必要です。
特にロケットは、事故が発生したときのインパクトが大きく、安全性が重視されるためシミュレーションを活用して開発および検証を行うことが主流です。
そんなわけで今回はMATLABによる宇宙輸送システムの飛行シミュレーションと題して、書いてみたいと思います。
宇宙輸送システムのモデル
今回モチーフとするのは、SpaceXのStarshipです。
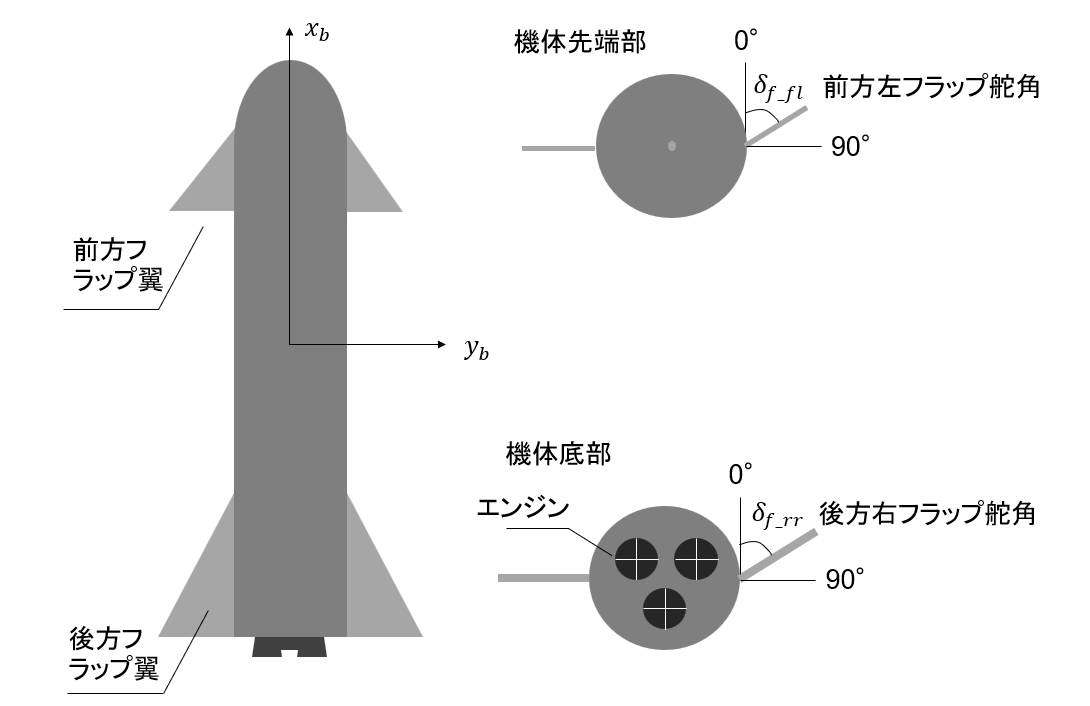
下図の通り、機体には4枚のフラップという独立に動く翼を配置し、翼に働く空気力を使って機体の姿勢を制御します。
加えて、機体底部には3基のエンジンを搭載し、それぞれが上下・左右に独立して動くジンバリング機構(TVC)を備え、推力の方向を変えることで全体の制御を行います。
今回も機体のモデル化にはメカニカル機構の物理モデリングツールであるSimscape Multibodyを活用します。
Multibodyを活用すると、形状の作成や運動の拘束表現、順逆運動にもとづく解析が行えるため、例えば以下のようなTVC機構の運動解析などが実施可能です。
過去にもいくつかの記事でSimscape Multibodyを使ったモデル化を紹介していますので、よかったらご覧ください。
今回、機体のモデル化に伴い以下を仮定します。
・機体ならびにフラップ翼は剛体である(変形しない)
・燃料によるスロッシングの影響は無視する
・ボディの重心と空力中心は一致する
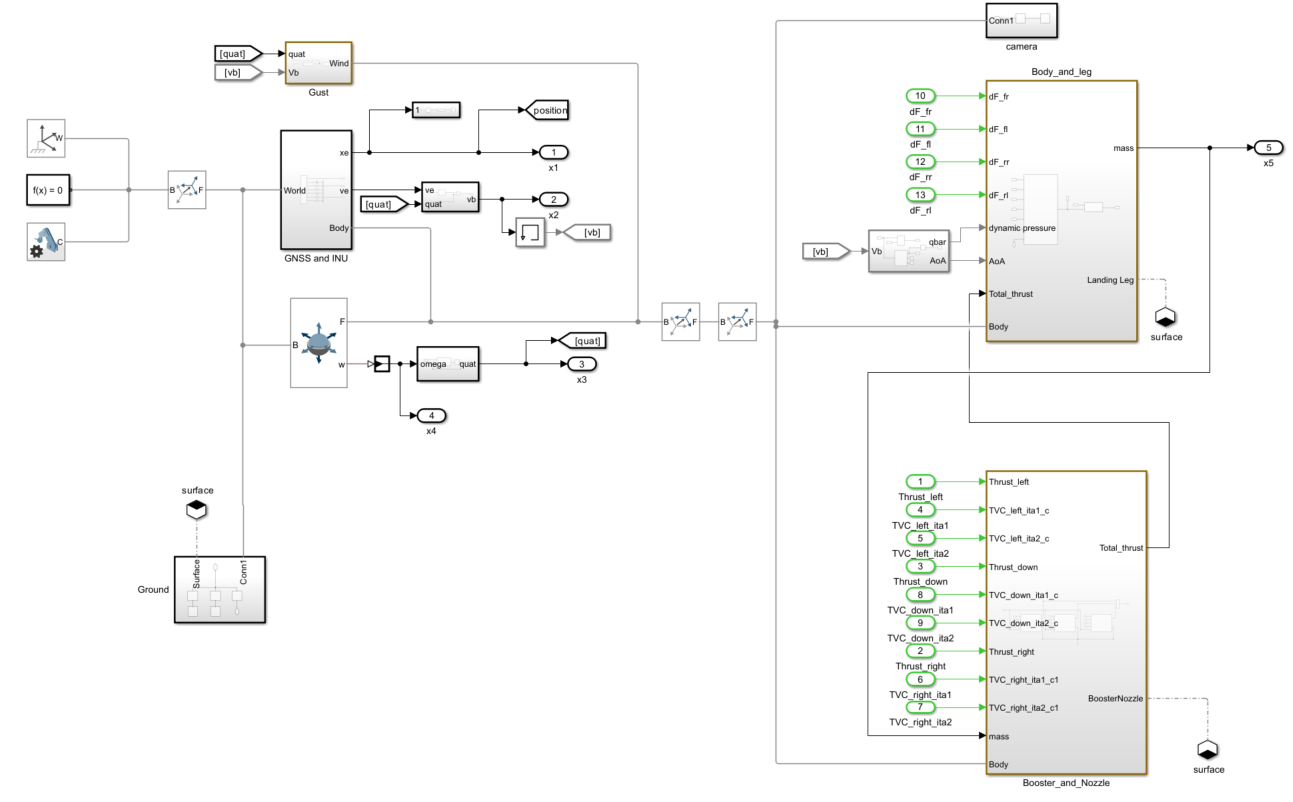
機体モデルの全体像は以下のようになっており、胴体、エンジンなどコンポーネント単位でサブシステムを構成し、それぞれを接続して機体全体の力学モデルを構築しています。
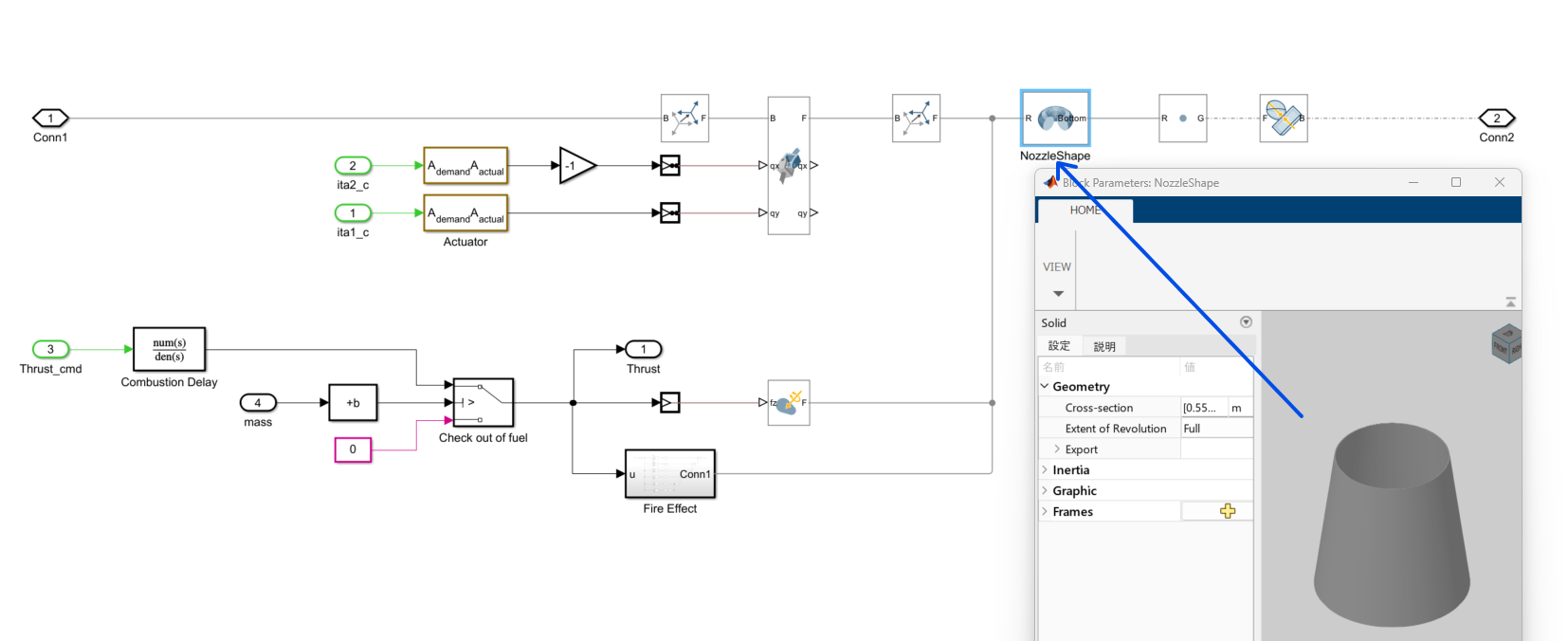
フラップなどの構成パーツはそれぞれSolidブロックとして形状を作成し、ある面の一点に空気力が集中して働くとして、以下の数式を基にモデリングしています。
f_{D} = \frac{1}{2} \rho v_{a}^2 C_{d_{flap}}(\alpha) \delta_{flap}
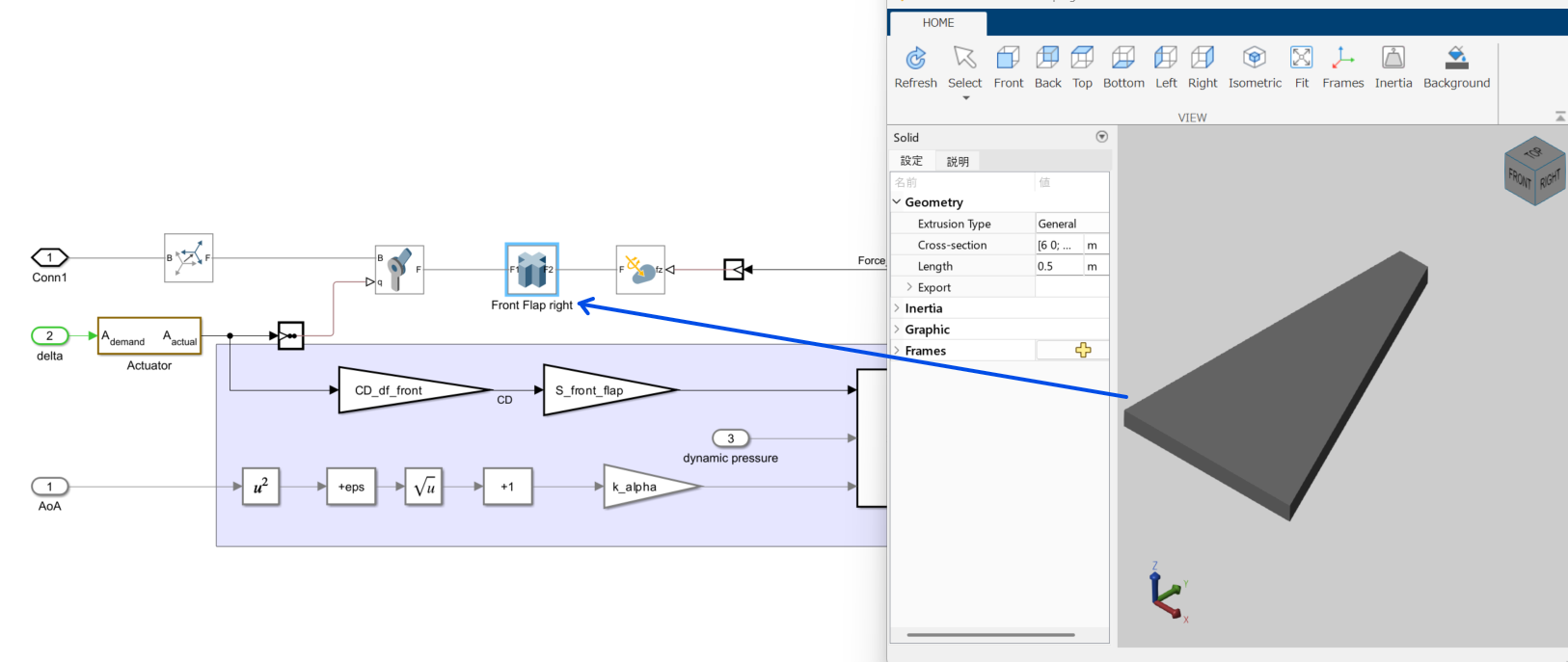
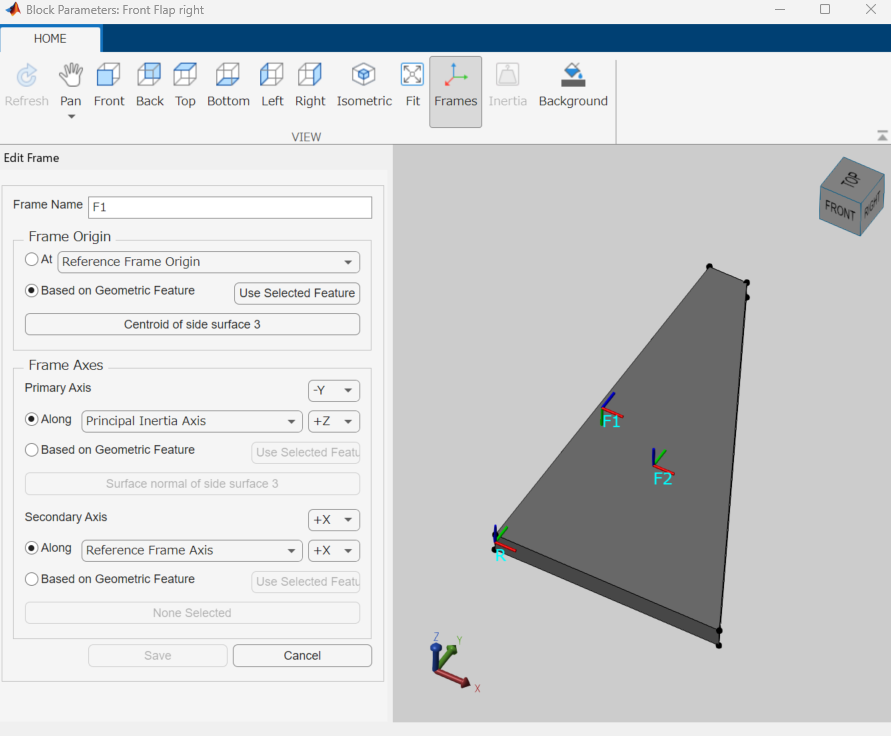
形状の特定の面にフレームを指定している様子↓
またフラップを駆動するアクチュエーターについては、飽和要素を持った非線形な2次遅れシステムとしてモデル化します。
エンジンおよびTVCについても同様にSolidブロック、アクチュエーターの遅れ、燃焼の遅れから構成し、ダイナミクスを表現しています。
燃料を消費することによる質量や慣性の変動についてはGeneral Variable Massブロックを利用しています。
フライトシミュレーション
今回はStarshipの帰還フェーズを真似て、高度3000[m]からマッハ0.27で降下飛行している状況において機体を誘導制御し、着陸ポイントまで戻ってくることを想定したいと思います。
その際ですが、飛行フェーズを2つに分けて、空力によって機体を減速させつつ姿勢を制御する空力制御フェーズ、エンジンを点火しTVCによって推力の方向を適切に変えながら速度・姿勢を制御するLanding burnフェーズに分けることにします。
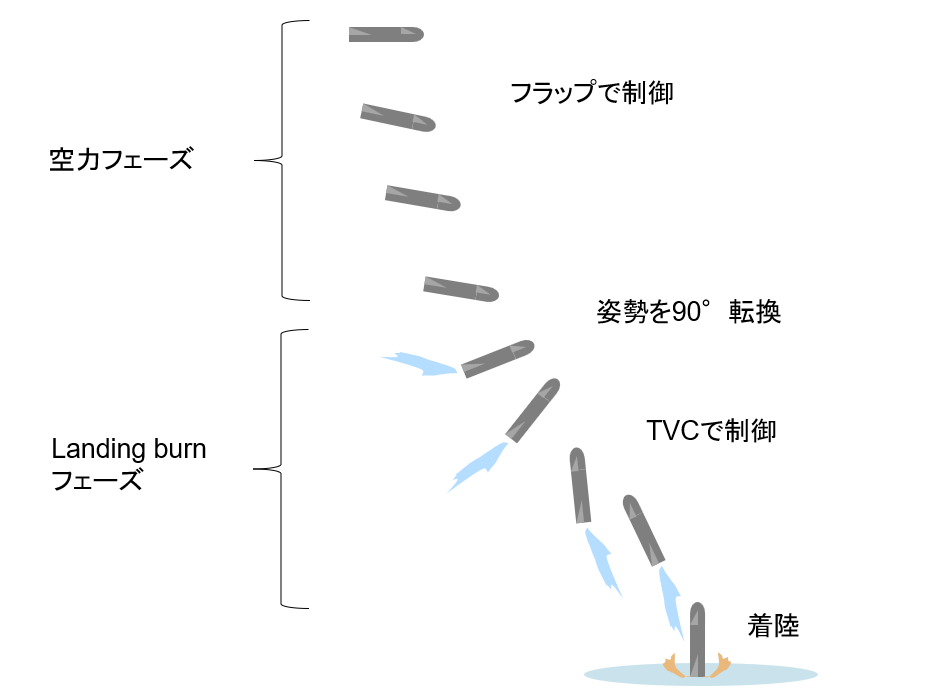
そして、空力制御フェーズでは機体にはたらく空気力(抗力)を最大とするために機体胴体を寝かせた姿勢(ベリーフロップ)で飛行するようにプロファイルから制御を構成し、所定の高度からフェーズ遷移を行い、エンジンTVCによって姿勢を90°ピッチ転回させて、減速しつつ最終的に垂直に着陸するように制御を掛けます。
飛行制御部は下図のようにStaeflowを用いた状態遷移で管理し、各制御のターゲットや操作量を変えて制御しています。
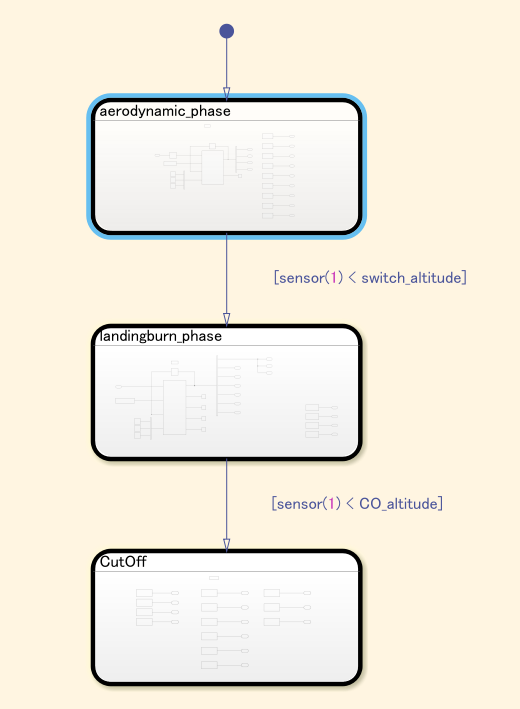
各フェーズの誘導制御は非線形MPCで組んでいます。

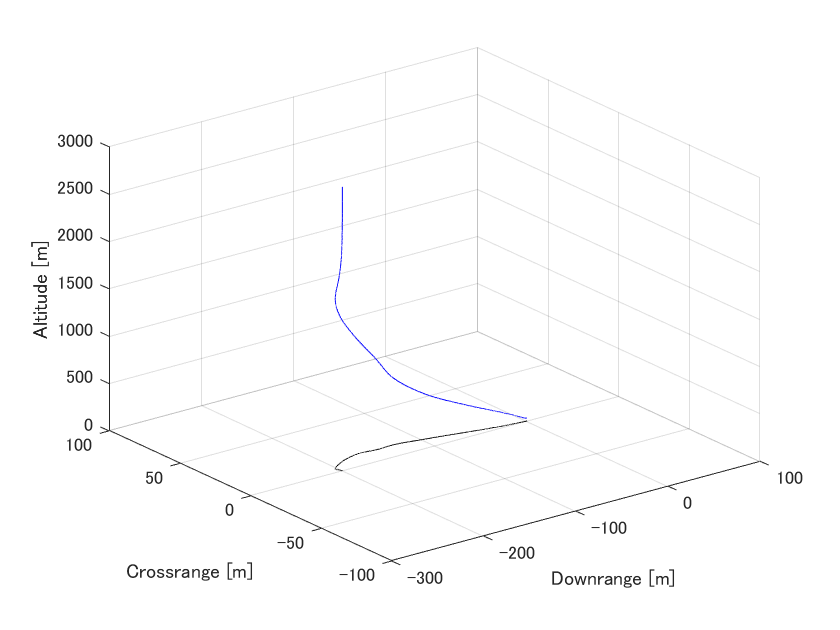
以下にシミュレーションによって生成した飛行アニメーションおよび各種状態量のトレンドを掲載します。
<飛行軌道>
<機体軸速度>
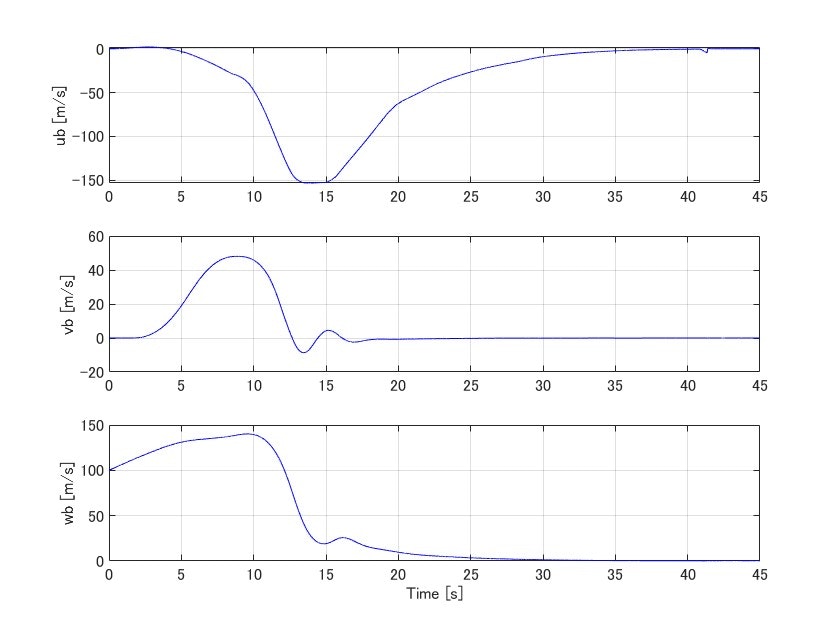
<姿勢(クォータニオン)>
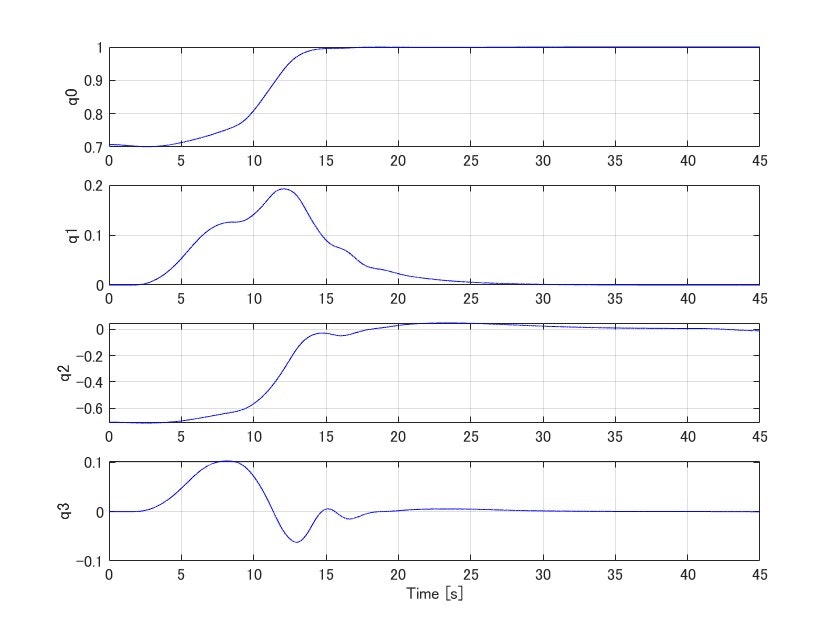
アニメーションおよび各種状態量からフェーズに沿った飛行を行い、最終的に所定のポイントに向けて誘導し着陸できていることが確認できました。
特に速度において、10秒から15秒の間で機体軸での速度がwb→ubへと遷移している部分がフェーズ遷移をしている期間で、クォータニオンのq2(ピッチ軸)の結果からも機体を引き起こしている様子が分かります。そして、最終的には3軸の速度をゼロに収束させ、一定の姿勢で着陸できていることが分かります。
続いて、操作量の履歴です。
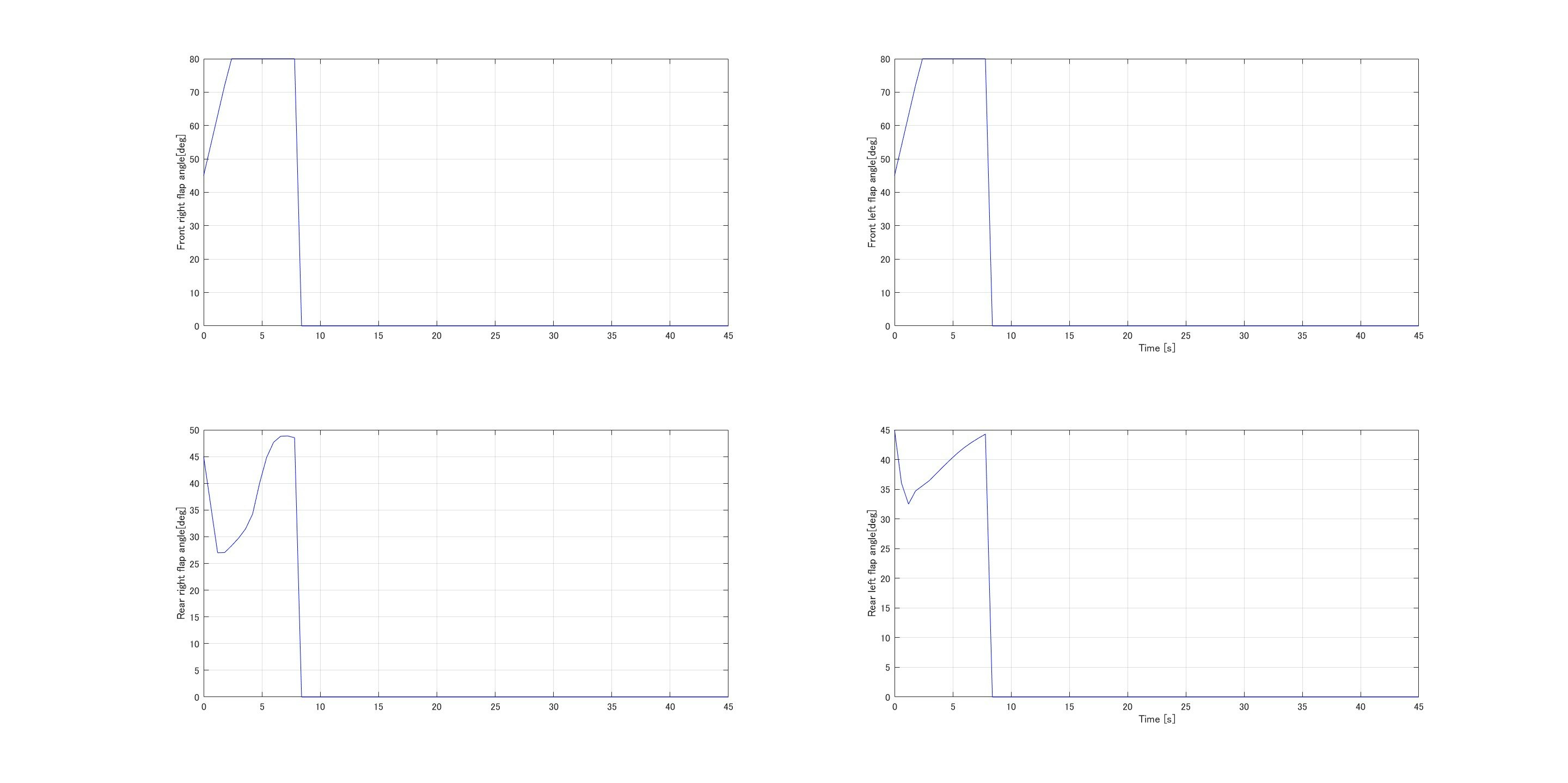
<フラップ舵角>
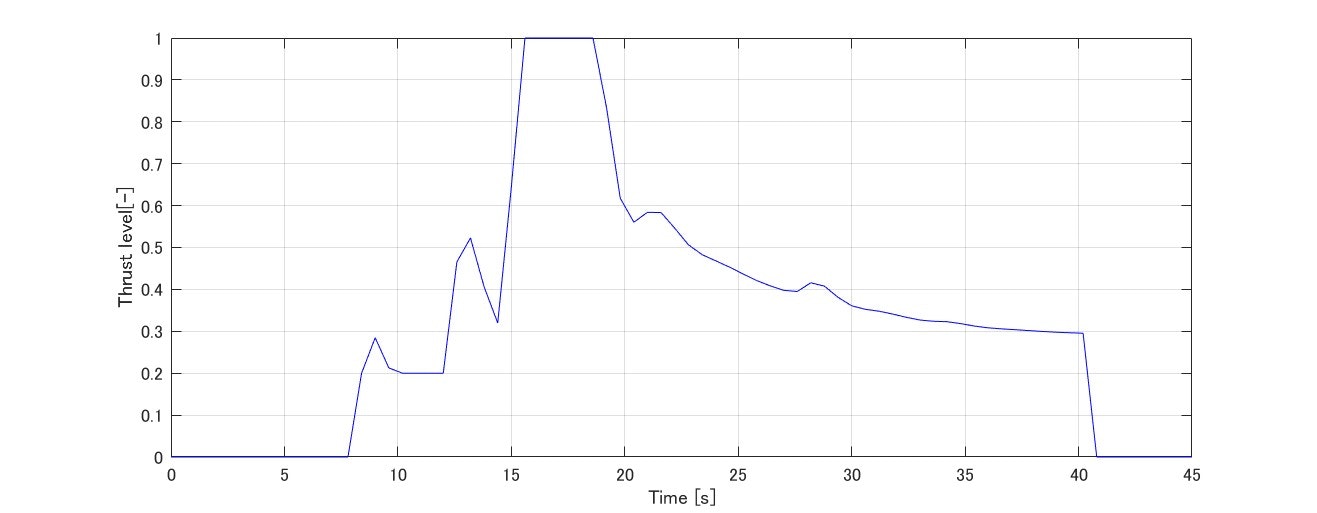
<推力レベル>
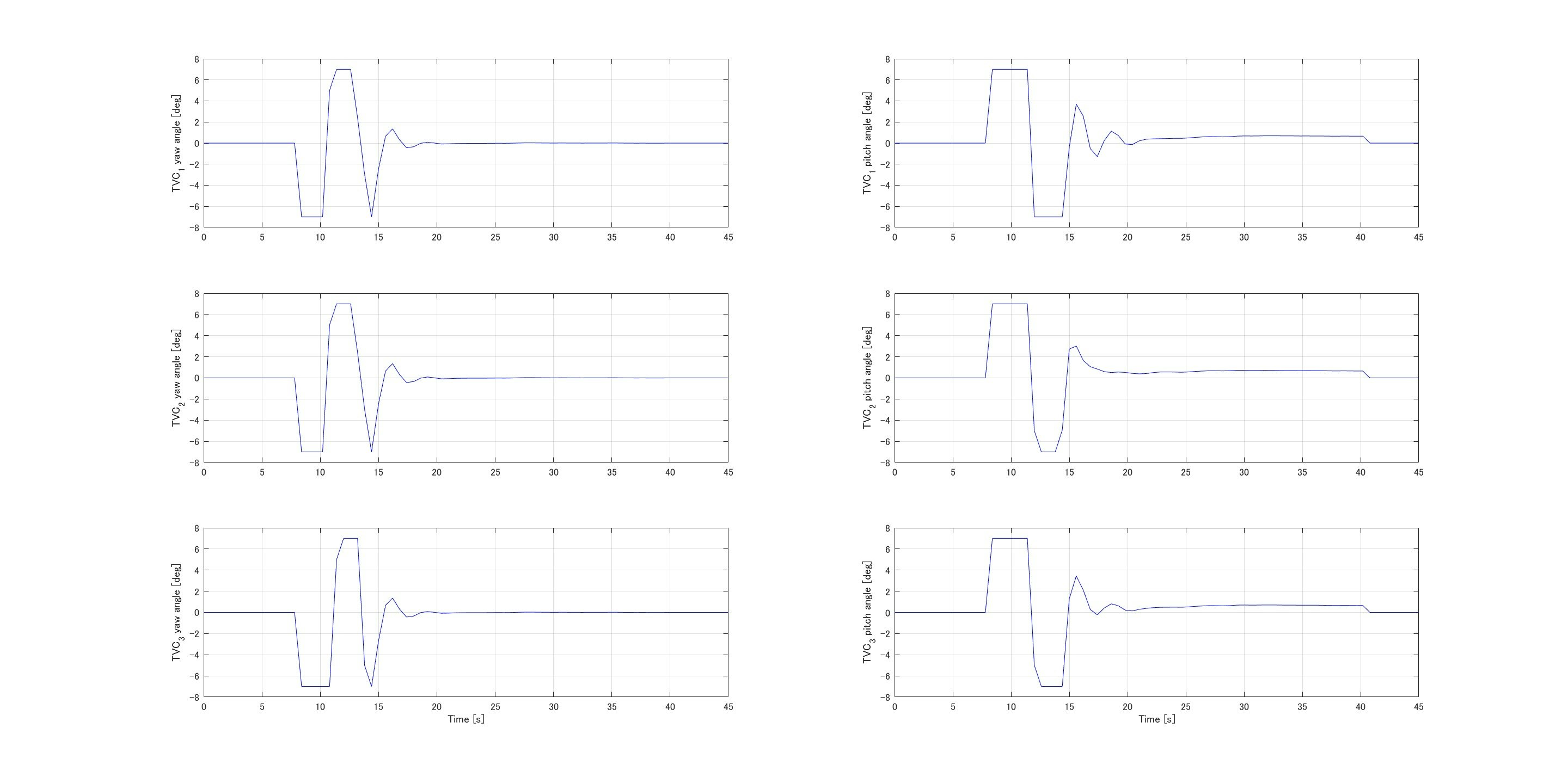
<TVC舵角>
空力制御フェーズでは4枚のフラップ舵角を使い、角度をそれぞれ適切に操舵していることが分かります。
またLanding burnフェーズへの移行に伴い全フラップを閉じて、以降はエンジンおよびTVCによって動力降下を行っています。
エンジンは3基搭載されていますが、各エンジンとも推力を適切にスロットリングしつつ、TVCの舵角を操作することで所定の制御を実現している様子が分かります。
さいごに
宇宙輸送システムのシミュレーションということでStarshipの帰還フェーズの一部を模擬した環境を構築してみました。実際の試験映像↓と見比べてみても何となくそれっぽい再現になっているような気がします。
今回はノミナルなシミュレーションのみでしたが、実際にはセンサーノイズや推力のオフセット、風など様々な影響を考慮してロバスト性を評価し、飛行の安全性やミッションの成功確率を算定しています。
宇宙の界隈では、Test Like You Fly, Fly Like You Test(飛んでいるようにテストし、テストのように飛べという意味)という言葉があるくらい飛行前の入念な検証がミッションの成立性に影響を与えます。
机上でのシミュレーションやハードウェアを組み込んだリアルタイムシミュレーションを入念に実施して、評価を行っています。