環境
- Jetson AGX Xavier
- Ubuntu 18.04
- ROS2 Dashing
- Rviz2
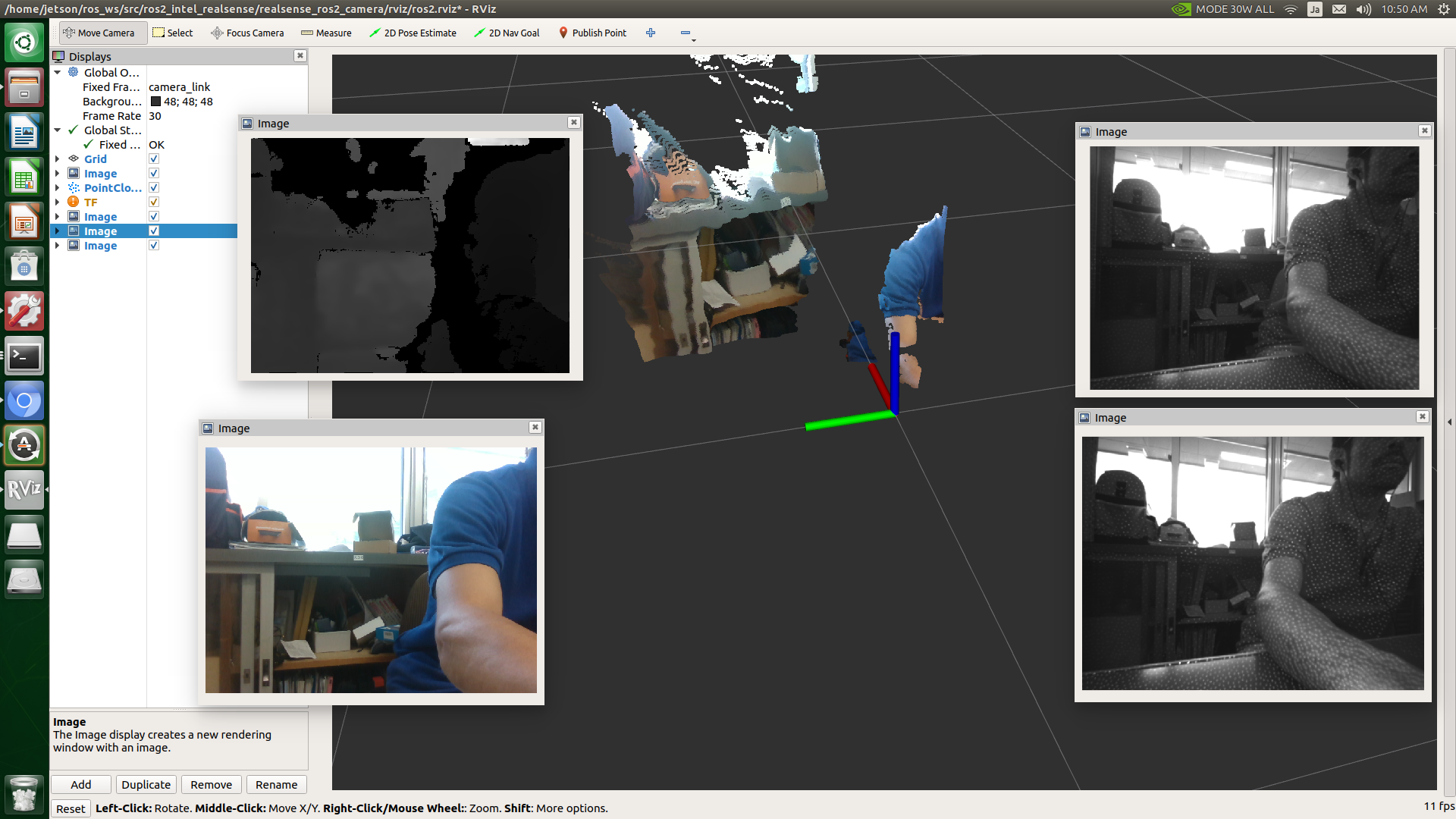
はじめに
realsense depth camera D435をrviz2で表示する

目次
インストール
get code
mkdir -p ~/ros_ws/src
cd ~/ros_ws/src
git clone https://github.com/intel/ros2_intel_realsense.git
build
cd ~/ros_ws
source /opt/ros/dashing/setup.bash
colcon build --base-paths src/ros2_intel_realsense
動作確認
source /opt/ros/dashing/setup.bash
source ~/ros_ws/install/local_setup.bash
コンソールを2つ立ち上げてそれぞれに下記のコマンドを入力
console1
ros2 run rviz2 rviz2 -d ~/ros2_ws/src/ros2_intel_realsense/realsense_ros2_camera/rviz/ros2.rviz
console2
ros2 run realsense_ros2_camera realsense_ros2_camera
既知の問題点
[WARN] [RealSenseCameraNode]: Given stream configuration is not supported by the device!
このような表示が出る場合はUSBケーブルが3.1のケーブルになっていない
ubuntuのディストリビューションは18.04が最後になりそう