__@yakiimo121さんのウェブサイト「MiDaS Webcamを用いてリアルタイム単眼深度推定してみた」__を参考にして、GitHubに上がっている論文 "Towards Robust Monocular Depth Estimation: Mixing Datasets for Zero-shot Cross-dataset Transfer"の実装コードを動かしてみました。
実行したコード
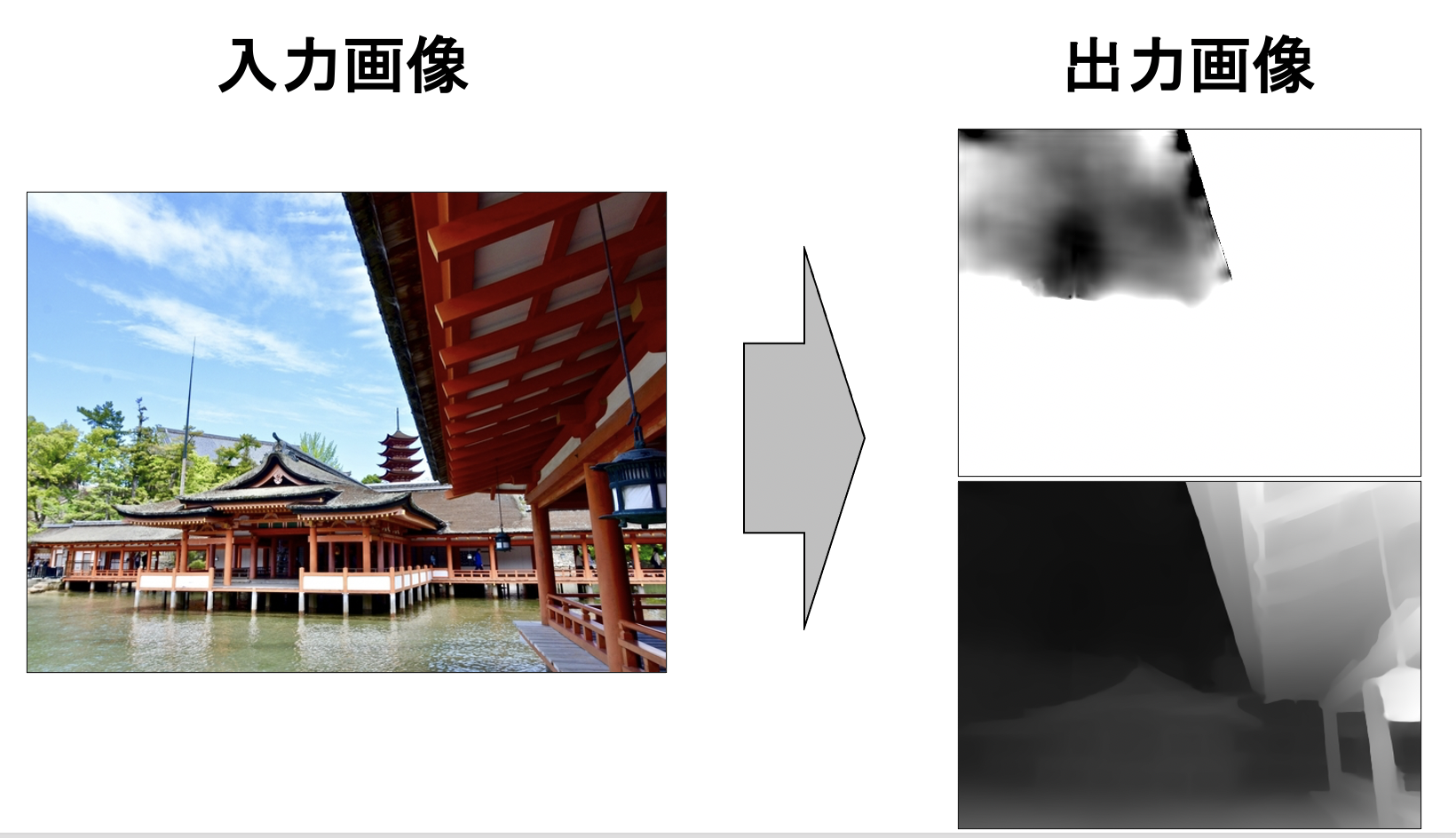
最初に、実行結果の例を紹介します。
1枚の入力画像(左側)に対して、2枚の画像(右側の上段と下段)が出力されます。
__( 入力画像の入手元 ) __
素材となるファイルは、ウェブサイトから、手動でダウンロードした建物や風景の画像ファイルを使いました。
計算環境
Macbookに、先ほどのGitHubリポジトリから、スクリプト資源一式をgit clone__して、CPUだけを使って、推論を実行しました。
MacbookのTerminalでの実行記録を掲載します。
__python3 run.py --model_type dpt_large__と、叩くだけで成功しました。
__"Towards Robust Monocular Depth Estimation論文__では、単眼カメラで撮影した画像から、画像の奥行き(撮影者からの距離の遠近)を推定するアルゴリズムが提案されています。この技術は、「単眼度深度推定」と呼ばれています。
実行方法
Terminalに打ち込んだコマンドは、以下です。
(環境構築については、この記事の最後に掲載しています)
__model_type__としては、 __dpt_large__を選びました。
これは、GitHubリポジトリから取得した4つの(学習済み)重みファイルの中で、最もきめ細かい解析が行えるモデルです。その代わり、取計算時間は4つの中で最長です。
electron@diynoMacBook-Pro MiDaS % python3 run.py --model_type dpt_large
initialize
device: cpu
start processing
processing input/cars.jpg (1/5)
/usr/local/lib/python3.9/site-packages/torch/nn/functional.py:3451: UserWarning: Default upsampling behavior when mode=bilinear is changed to align_corners=False since 0.4.0. Please specify align_corners=True if the old behavior is desired. See the documentation of nn.Upsample for details.
warnings.warn(
processing input/uk.jpeg (2/5)
processing input/pic1.jpg (3/5)
processing input/india.jpg (4/5)
processing input/kyoto.jpg (5/5)
finished
electron@diynoMacBook-Pro MiDaS %
入力データと出力データ
( 入力画像 )
入力画像は、撮影地点からの距離が、モノクロの明暗の単色で表現された画像に変換されます。
- 入力: 単眼カメラで撮影した画像ファイル
- 出力: 画像の奥行き(撮影者からの距離の遠近)が、モノクロの明暗で表現された画像
( 出力画像 )
何がすごいのか
従来、画像の深度を推定するためには、同一の対象風景(物体)を、2つのカメラ焦点から同時に捉える必要がありました。そのため、双眼鏡のような、2つのレンズを持ったカメラが必要でした。2つのレンズを持ったカメラは、「ステレオカメラ」と呼ばれています。
左右の目を持つ人間がやっているように、両焦点の間の視差を手掛かりに、見ている観察者と観察対象物との間の距離を推定していたためです。


- ( 参考 )Wikipedia ステレオカメラ
ステレオカメラ(英: stereo camera)とは、対象物を複数の異なる方向から同時に撮影することにより、その奥行き方向の情報も記録できるようにしたカメラのことである。
通常は、1台で両眼視差を再現し、立体的な空間把握のできる立体写真の撮影が可能になっているものをさす。
- ( 参考 )ステレオカメラについて動画でご紹介!
ステレオカメラ(すてれおかめら、stereo camera)とは、人が物を見る原理と同じように、2つのカメラ(2眼のカメラ)を用いて対象物を複数の異なる方向から同時に撮影することにより、カメラの画素の位置情報から、奥行き方向の情報も計測することが可能なカメラのことです。
ステレオカメラはステレオビジョンやステレオカメラシステム、ステレオカメラユニット、ステレオデジタルカメラなどとも呼ばれることがあります。
今回動かしてみた実装コードは、レンズ(焦点)が1つしかない「1つ目」のカメラで撮影した画像に対して、被写体の距離深度を推定できるところが、技術的な達成点です。
「1つ目」の単眼カメラから、被写体との距離を明暗表示した画像を作り出せるようになると、低価格帯のドローンに内蔵されている(1つ目)カメラが捉えた画像を、リアルタイムに処理することができるなど、商業面でのニーズがありそうです。
普通の単眼カメラでわずか1枚の写真を撮るだけで、高精度な距離画像を得られる技術を東芝が開発した。
レンズの口径分による像のボケ具合や、レンズによる色収差・非点収差など画像上の像の微細な様子を基に距離を推定する方式であり、特殊なレンズや画像センサを使う必要がなく、通常の一般的な市販レンズをそのまま使える点が最大の特徴である(図1、図2)。
収差からの距離推定は非常に複雑なため、東芝は今回、ディープラーニング(深層学習)技術を用いることで、精度高く距離画像を得られるようにした。レンズを用いた事前の学習こそ必要だが、市販されている多くの単眼レンズとRGBカメラで手軽に距離画像を得られる。
実行コード ( 全体 )
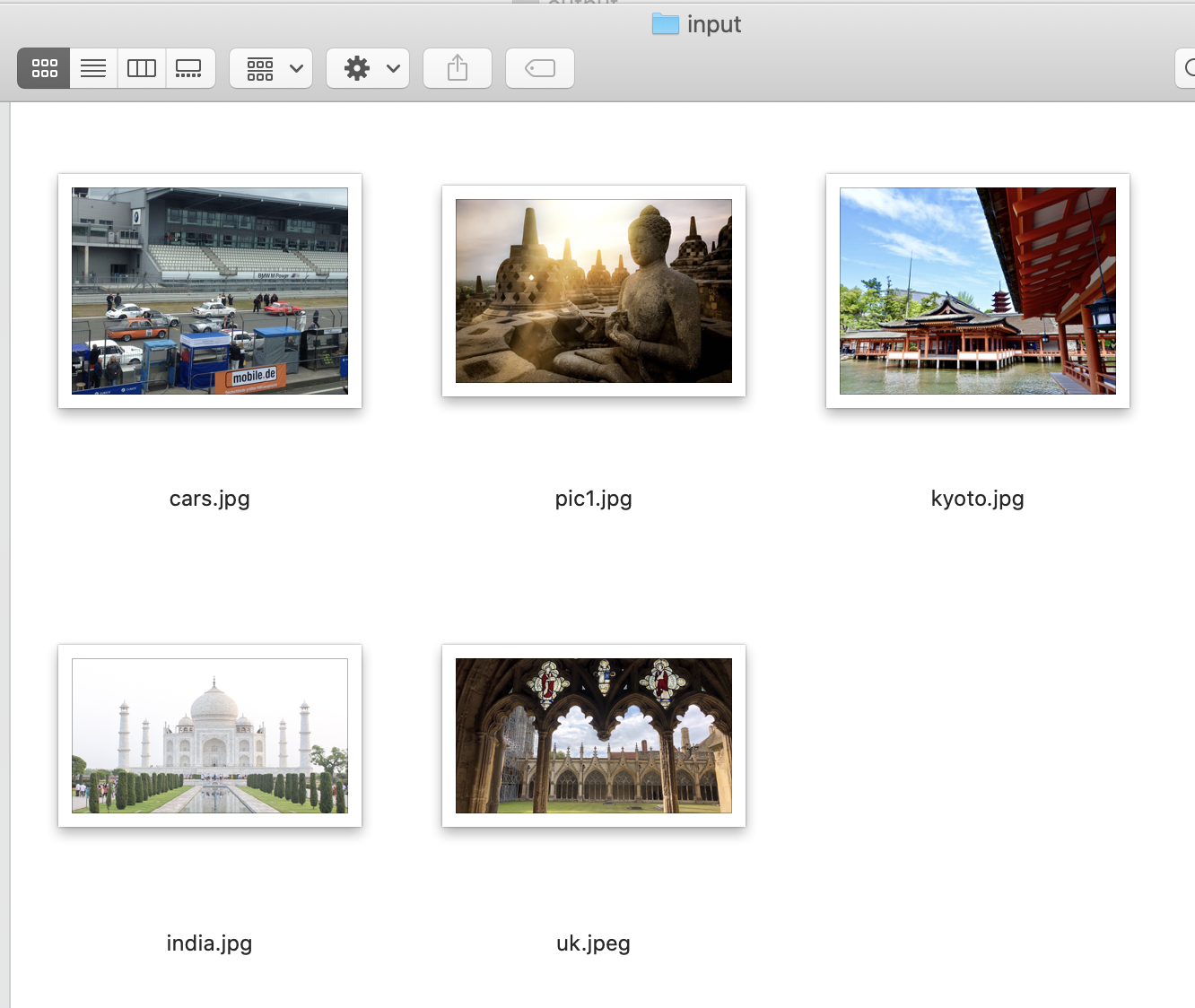
inputディレクトリの中に、画像ファイルを5枚、置いておく
electron@diynoMacBook-Pro MiDaS %
electron@diynoMacBook-Pro MiDaS % ls input
cars.jpg india.jpg kyoto.jpg pic1.jpg uk.jpeg
electron@diynoMacBook-Pro MiDaS %
実行前は、outputディレクりは空の状態
electron@diynoMacBook-Pro MiDaS % ls output
inputディレクトリに格納した複数の画像ファイルが、一括処理される。
(今回は5枚の画像ファイルを一括処理)
electron@diynoMacBook-Pro MiDaS % python3 run.py --model_type dpt_large
initialize
device: cpu
start processing
processing input/cars.jpg (1/5)
/usr/local/lib/python3.9/site-packages/torch/nn/functional.py:3451: UserWarning: Default upsampling behavior when mode=bilinear is changed to align_corners=False since 0.4.0. Please specify align_corners=True if the old behavior is desired. See the documentation of nn.Upsample for details.
warnings.warn(
processing input/uk.jpeg (2/5)
processing input/pic1.jpg (3/5)
processing input/india.jpg (4/5)
processing input/kyoto.jpg (5/5)
finished
electron@diynoMacBook-Pro MiDaS %
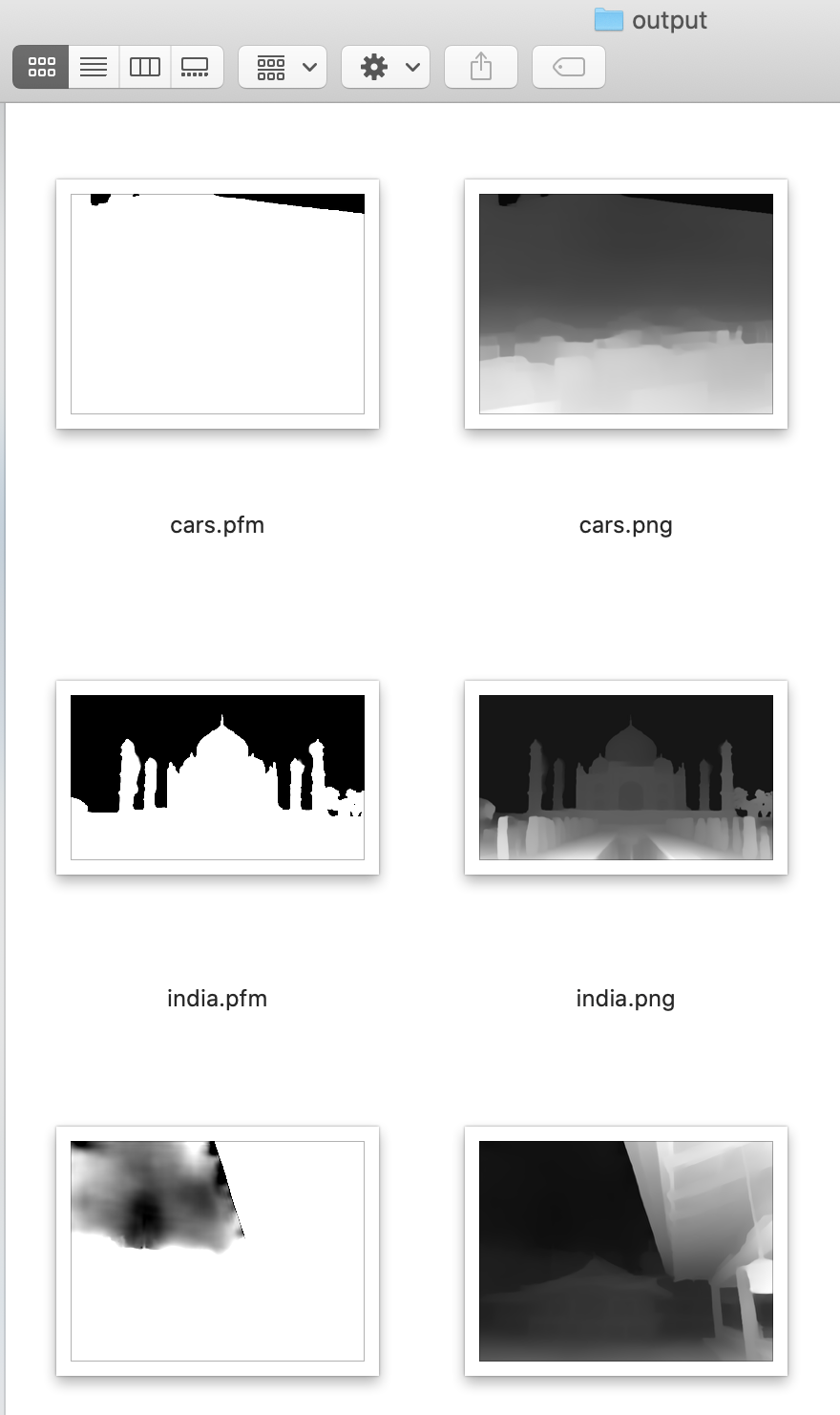
5枚の画像ファイルが出力された
electron@diynoMacBook-Pro MiDaS % ls output
cars.pfm cars.png india.pfm india.png kyoto.pfm kyoto.png pic1.pfm pic1.png uk.pfm uk.png
electron@diynoMacBook-Pro MiDaS %
( 環境構築 )
- Python 3.7.4を使いました。
electron@diynoMacBook-Pro ~ % mkdir opencv_midas
electron@diynoMacBook-Pro ~ % cd opencv_midas
electron@diynoMacBook-Pro opencv_midas % pyenv local 3.7.4
electron@diynoMacBook-Pro opencv_midas % pyenv versions
system
2.7.16
3.6.0
3.6.1
3.6.3
3.6.3/envs/gpt2_ja
3.7.0
* 3.7.4 (set by /Users/electron/opencv_midas/.python-version)
3.9.0
gpt2_ja
electron@diynoMacBook-Pro opencv_midas %
- 未取得だったので、pytorchとopencv-pythonモジュールを取得(pip install)
electron@diynoMacBook-Pro opencv_midas % pip3 install torch==1.8.0 torchvision
electron@diynoMacBook-Pro opencv_midas % pip3 install opencv-python
electron@diynoMacBook-Pro opencv_midas % git clone https://github.com/intel-isl/MiDaS.git
```bash:Terminal
electron@diynoMacBook-Pro opencv_midas % ls
MiDaS
electron@diynoMacBook-Pro opencv_midas %
electron@diynoMacBook-Pro opencv_midas % ls MiDaS
Dockerfile README.md input mobile ros tf weights
LICENSE hubconf.py midas output run.py utils.py
electron@diynoMacBook-Pro opencv_midas %
- デフォルトでは、__weights__ディレクトリの中は空。
electron@diynoMacBook-Pro opencv_midas % ls MiDaS/weights
electron@diynoMacBook-Pro opencv_midas %
- GitHubリポジトリから、各モデルの学習済みの重みパラメータファイルを取得(wget)
electron@diynoMacBook-Pro opencv_midas % cd MiDaS
electron@diynoMacBook-Pro MiDaS % wget https://github.com/intel-isl/DPT/releases/download/1_0/dpt_large-midas-2f21e586.pt
electron@diynoMacBook-Pro MiDaS %
electron@diynoMacBook-Pro MiDaS % ls
Dockerfile dpt_large-midas-2f21e586.pt midas ros utils.py
LICENSE hubconf.py mobile run.py weights
README.md input output tf
electron@diynoMacBook-Pro MiDaS %
electron@diynoMacBook-Pro MiDaS % mv dpt_large-midas-2f21e586.pt ./weights/dpt_large-midas-2f21e586.pt
electron@diynoMacBook-Pro MiDaS % ls
Dockerfile README.md input mobile ros tf weights
LICENSE hubconf.py midas output run.py utils.py
electron@diynoMacBook-Pro MiDaS %
- 大中小それぞれのモデルの重みファイルを一つずつ取得(wget)
electron@diynoMacBook-Pro MiDaS % cd weights
electron@diynoMacBook-Pro weights % wget https://github.com/intel-isl/DPT/releases/download/1_0/dpt_hybrid-midas-501f0c75.pt
--2021-07-16 15:02:41-- https://github.com/intel-isl/DPT/releases/download/1_0/dpt_hybrid-midas-501f0c75.pt
・・・
electron@diynoMacBook-Pro weights %
electron@diynoMacBook-Pro weights % ls
dpt_hybrid-midas-501f0c75.pt dpt_large-midas-2f21e586.pt
electron@diynoMacBook-Pro weights %
electron@diynoMacBook-Pro weights % wget https://github.com/AlexeyAB/MiDaS/releases/download/midas_dpt/midas_v21_small-70d6b9c8.pt
・・・
2021-07-16 15:03:39 (15.4 MB/s) - `midas_v21_small-70d6b9c8.pt' へ保存完了 [85761505/85761505]
electron@diynoMacBook-Pro weights %
electron@diynoMacBook-Pro weights % wget https://github.com/AlexeyAB/MiDaS/releases/download/midas_dpt/midas_v21-f6b98070.pt
・・・
-2021-07-16 15:04:21 (12.7 MB/s) - `midas_v21-f6b98070.pt' へ保存完了 [422509849/422509849]
electron@diynoMacBook-Pro weights %
- 4種類のサイズ、各モデルの重みファイルが取得できた。
electron@diynoMacBook-Pro weights % ls
dpt_hybrid-midas-501f0c75.pt dpt_large-midas-2f21e586.pt midas_v21-f6b98070.pt midas_v21_small-70d6b9c8.pt
electron@diynoMacBook-Pro weights %