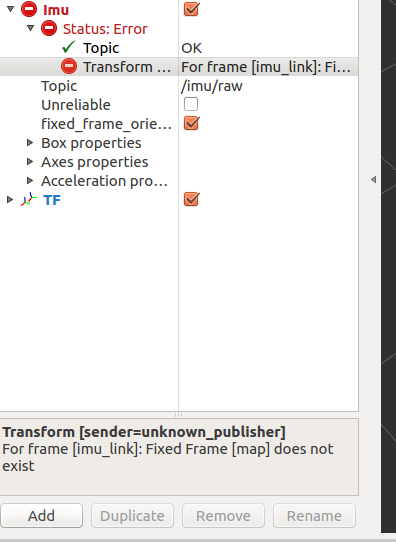
自作したIMUパッケージを使用して、sensor_msgs/Imuトピックを送信しRviz上で確認しようとしたところ以下のエラーが出た。
解決策
terminalを開いて、static_transform_publisherを起動することで解決できる。
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 map frame 100
# 書式はstatic_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
# period_in_msは100が推奨されている。