前提
AutowareのDockerが起動している状態。
https://qiita.com/atsuto/items/a99296bbd687928967bd
接続
Velodyneと、PCを直接Etherケーブルで接続。
ネットワーク設定
PCの有線接続のアドレスを、Velodyneと同じ192.168.0.xx系に設定。

IPを指定してVelodyneの設定画面を開き、送信先にPCのIPを設定する。

Rviz
ポイントクラウドのnodeを立ち上げる。
使い方:$ roslaunch [package] [filename.launch]
参考:
http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16
https://faboplatform.github.io/AutowareDocs/01.Velodyne_VLP-16/01.Ros_rviz/
$ roslaunch velodyne_pointcloud VLP16_points.launch &
$ rosnode list
$ rostopic echo /velodyne_points //データが来ているのが分かる
$ rosrun rviz rviz -f velodyne //Rvizの起動
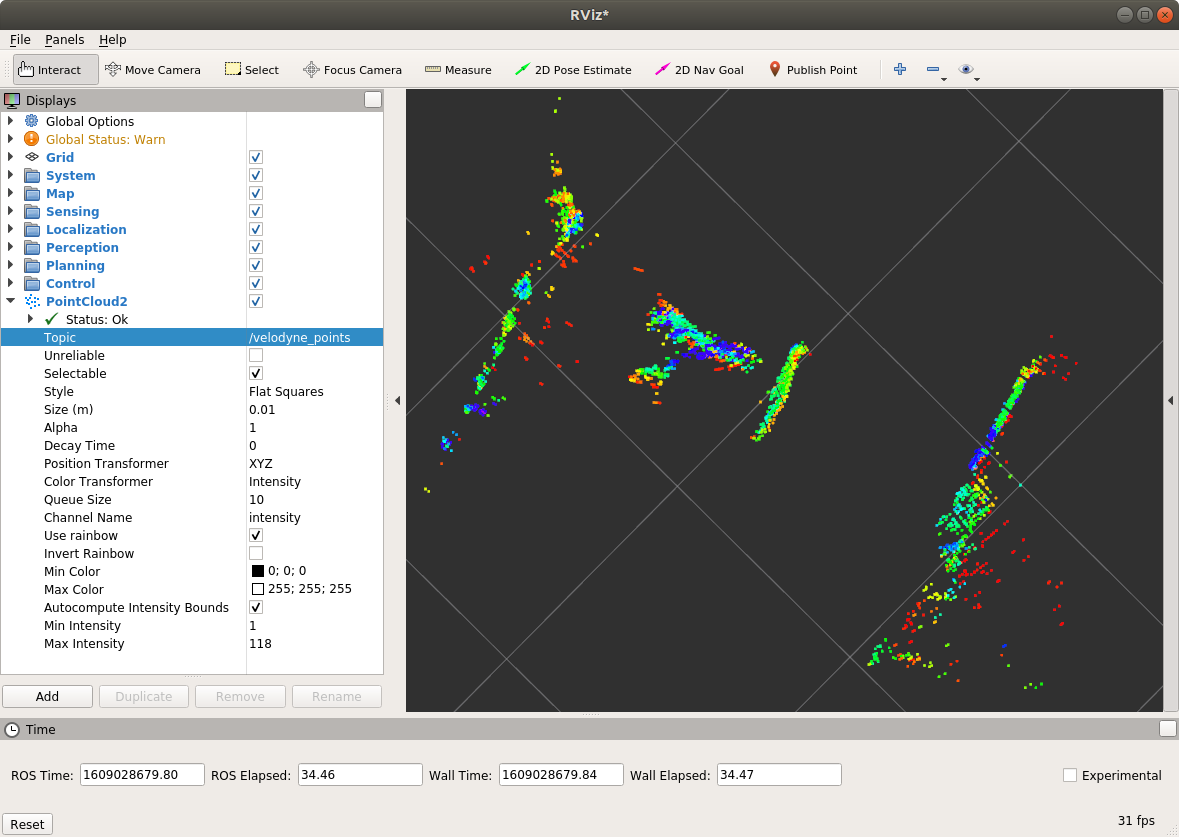
Addから「Point Cloud2」を追加し、Topicに「/velodyne_points」を入力すると、下記のように点群が表示される。