分類器を学習させる
CIFAR10を使って実際にPyTorchで認識を行う分類器を構築する。今回の実装のgistはここ
What about data?
画像や文章、音声やビデオなどのデータを扱う場合、まずデータをnumpy arrayなどに読み込み、torch.*Tensorに変換する。画像に対してはPillow, OpenCV、音声に対してはscipyやlibrosa、文章に対してはPythonのデータローディングパッケージやNLTK、SpaCyなどを使うと良い。
PyTorchでは特にコンピュータビジョンのためのパッケージ、torchvisionがあり、
CIFAR10やImagenetなど一般的なデータセットのデータローダーがある。
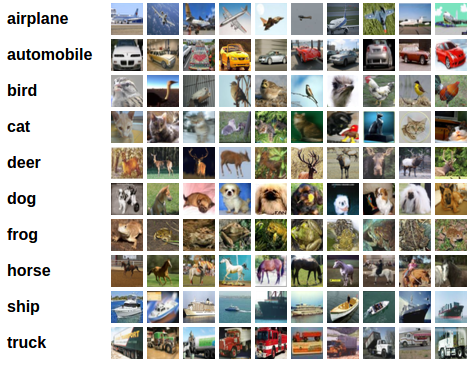
このチュートリアルではCIFAR10のデータセットを用いる。CIFAR10の入力データRGBの3チャネルの縦横が32ピクセルの3x32x32となっている。
Training an image classifier(画像の分類器を学習させる)
分類器の学習のためには以下のようなステップを踏む必要がある。
- CIFAR10の学習データセットとテストデータセットを
torchvisionで読み込み、正規化する。 - CNNを定義する。
- 損失関数を定義する。
- 学習データを使ってネットワークを定義する。
- テストデータを使ってテストを行う。
1. CIFAR10を読み込み、正規化する
torchvisionを使うことで、簡単にデータセットを読み込むことができる。torchvisionデータセットの出力はPILImageの[0,1]の画像であり、これを[-1,1]二世聞かされたのTensorに変換する。
import torch
import torchvision
import torchvision.transforms as transforms
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
このスクリプトを実行するとcifar-10のデータセットが./dataいかにダウンロードされる。
2. CNNを定義する
CIFAR 10についてはRGBの3チャネルの画像となるため、チュートリアル#3の一つ目の畳み込み層を微修正して実装する。
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
3. 損失関数及びオプティマイザを定義する
今回はMomentumつきSGDをオプティマイザとする。
SGDには谷間をナビゲートする上で問題がある(谷間とは、表面がカーブしているエリアのことで、ある次元では他の次元よりカーブがもっと急峻になっている部分)。Momentumは関連性のある方向へSGDを加速させ振動を抑制する方法である1。SGDに慣性化項を付与したもの。
重み$\bf{w}$を更新する場合は、$\bf{E}$を誤差関数、$\eta$を学習率とすると、
$$\bf{w^{t+1}} \leftarrow \bf{w^{t}} - \eta \frac{\partial E(\bf{w^t} )}{\partial \bf{w^t}}$$
で重みが更新される2。
一方MomentumつきSGDは慣性項のパラメータを$\alpha$とすると、前回の更新量を$\alpha$倍して加算することでパラメータの更新をより慣性的にする。この手法はパラメータが二つあるため、最適化が難しいとも言われる。
$$\bf{w^{t+1}} \leftarrow \bf{w^{t}} - \eta \frac{\partial E(\bf{w^t} )}{\partial \bf{w^t}} + \alpha \Delta \bf{w^t}$$
import torch.optim as optim
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9) # momentumを引数として渡すとmomentumつきSGDに
4. ネットワークを学習させる
データをfor loopによって繰り返し読み込み、入力をネットワークにフィードして最適化する。
# 学習を2エポック回す(データセットを2回繰り返す)
for epoch in range(2):
running_loss = 0.0
# 学習データセットを順に読み込んで行く。
for i, data in enumerate(trainloader, 0):
inputs, labels = data
inputs, labels = Variable(inputs), Variable(labels)
optimizer.zero_grad()
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.data[0]
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
5. ネットワークをテストデータでテストする
ネットワークに入力を渡した際の出力は10次元のベクトルとなり、これがそれぞれのラベルの予測確率になるため、この予測確率が最大となるものが予測結果となる。
correct = 0
total = 0
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i]
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (
classes[i], 100 * class_correct[i] / class_total[i]))
実際に2エポックを回すとだいたいそれぞれのクラスに対して60~70%程度の精度で予測できるようになる。
Accuracy of plane : 62 %
Accuracy of car : 65 %
Accuracy of bird : 37 %
Accuracy of cat : 26 %
Accuracy of deer : 35 %
Accuracy of dog : 55 %
Accuracy of frog : 65 %
Accuracy of horse : 71 %
Accuracy of ship : 63 %
Accuracy of truck : 69 %