
空間を用いたコミュニケーション
われわれはふとした瞬間、人との距離を考えたりします。
一番考えることが多いのは電車の中でしょう。ギチギチに詰まった長椅子の隙間、そこに座りたいと思うか、その時次第の気分でしょう。
他にも好きな人とは距離を(精神的にも物理的にも)詰めたいものです。でも詰めすぎても相手を傷つけてしまうし、遠すぎても悲しくなってしまう。
そんな様子を近寄るとチクチクしてしまうヤマアラシに例えてフロイトはヤマアラシのジレンマと名付けたそうです(本当かはしらない)。
そんな不思議な関係がコミュニケーションと空間にはあるのです。
さて、今回は空間とコミュニケーションの関係を考えた近接学について紹介します。
その後、近接学のような空間を取り扱うための非言語処理について説明して、
近接学を応用した実装例を紹介します。
近接学とは
近接学(Proxemics)とは、集団内の個人間の距離に着目し、自然と起こる個々人の空間的配置がもたらす効果とその理由について調べる研究分野です。
近接学を研究するアプローチは2つあります。
一つは、ある個人を固定し、他人を可変にし、距離による効果を調べるアプローチです。こちらは統制された実験環境で行うことが多いです。このアプローチで発見された一番有名な言葉は*パーソナルスペース(個人的距離)*です。
このアプローチでEdward T. Hallさんが見つけた対人距離の法則(実は名前がないらしく適当にそんな名前をつけました)についてここでは少し詳しく述べます。
対人距離の法則とはある人の回りにいる人がどのような関係にあるかを示した法則です。可視化すると図1、まとめると表1の用になります。
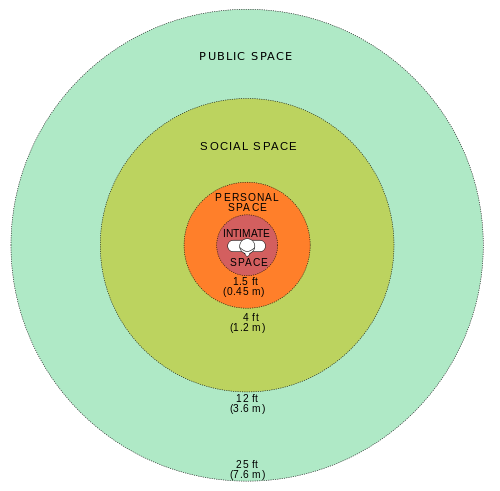
図1 可視化した対人距離の法則(WebHamsterによる作品[1]、CC BY-SA 3.0)
| 名前 | 距離[m] | 意味 |
|---|---|---|
| 密接距離 | 0.02 -0.46 | 抱きしめたり囁いたりする距離 |
| パーソナルスペース | 0.46 - 1.22 | 仲のいい友人や家族と話し合う距離 |
| 社会距離 | 1.22 - 3.7 | 知り合いと話す距離 |
| 公共距離 | 3.7 - | 一般の聴衆へスピーチする距離 |
表1 対人距離の法則
対人距離の法則から考えると、電車の椅子は見知らぬ人をキツキツに座らせすぎって事になりますね。
実際、スカスカなときは公共距離分離れているような気がします。
もう一つは、集団をビデオなどで観察して、自然と起こる現象から仮説形成するアプローチです。集団のみんなに撮影する許可を得て、現場で行うことが多いです。このアプローチで発見された有名な法則はF-formation です。F-formation[2]とは、集団が平等に話し合うとき、図2のように円を等分に分割するように陣形を取る現象です。円卓に座るように話し合うわけですね。
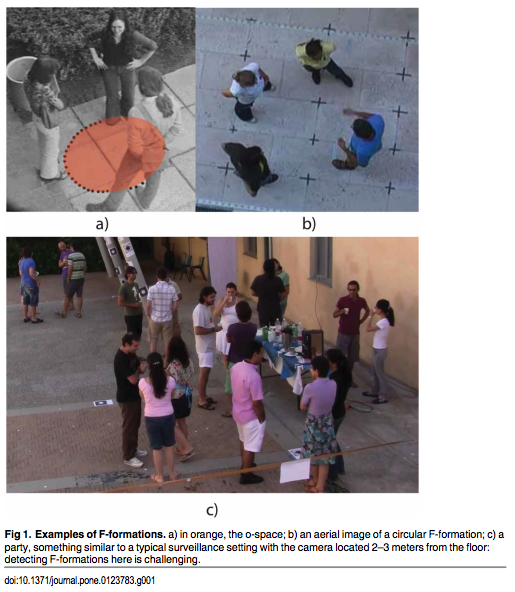
図2 F-formationの例([3]より引用)
空間による非言語処理
空間を測定する技術は近年劇的に成長しています。ただ、性質的に運動を把握する技術と近いところがあるため、説明が被ってしまいます。ご了承ください。
ハードウェア
空間を測定するハードウェアとして、測距センサやデプスセンサ、レーザーレンジファインダー、LiDAR、ミリ波レーダー、超音波レーダー、ステレオカメラがあります。
また、自分の位置を推定するために、GPSやビーコンを使います。特にGPSは期待していて、2018年春より測位衛星「みちびき」の運用がスタートするため、GPS(厳密には衛星測位システム)の精度がセンチ単位になります(現在は数十メートルの誤差があります)。
自分の位置を移動させるためにはアクチュエータが必要となってきます。ただし、ロボットなどを動かすには、大きなトルクが必要とされるため、減速機をつけまくったサーボやブラシレスモーターだけでなく、エンジンが使われることもあります。
ソフトウェア
空間を把握するためのソフトウェアとしては自己位置推定、環境地図作成、三次元物体検出、三次元物体追跡があります。このうち、自己位置推定と環境地図作成を同時に行える技術をSLAMと言います。SLAMの中で個人的に気にしているのは単眼カメラで行えるCNN-SLAMというアルゴリズムです。三次元物体検出に未だこれといったアルゴリズムはありませんが、主にディープラーニングが分野を開拓しています。三次元物体追跡にはパーティクルフィルタが使われると思われます。
また、空間中の指定した位置に機械が移動したり、機械が物体を移動させるためには、制御理論が必要となってきます。PID制御などの古典制御も人気ですが、近年ではディープな強化学習を用いた制御理論が発達してきています。
実装: 距離感を一定に保つ自動ミニ四駆
今回は制御理論でも最もシンプルなフィードバック制御を行います。
手と距離が40cmくらいになるように位置を調整します。
材料
Arduino Uno 1
モーターシールド 1
ToF式測距センサ 1
ブレッドボード 1
ミニ四駆 1
ジャンパワイヤ 多数
ACアダプタ 1
ソースコード
時間があったらね

まとめ
今回は空間とコミュニケーションの関係を考えた近接学について紹介しました。
ちなみにヤマアラシがお互いに近づくときは棘のない顔から近づいて、
一緒に寝るときは額を付けてこの問題を回避するそうです。
賢いですね。
参考文献
[1] https://en.m.wikipedia.org/wiki/Proxemics
[2] Kendon, "Spatial Organization in Social Encounters : the F-formation System," 1990
[3] Setti F, Russell C, Bassetti C, Cristani M (2015) F-Formation Detection: Individuating Free-Standing Conversational Groups in Images. PLOS ONE 10(5): e0123783. https://doi.org/10.1371/journal.pone.0123783