目的
CAN FDで送受信してみたい。
CAN FDに対応しているマイコンはRH850くらいしか知らないが、車載向けなので個人で入手は難しい(多分)。
そこで MCP2517FD という外付けのCANコントローラを使用した。
CAN FDはCANの拡張である。よってCANの知識が必要。
・猿でも分かるCANプロトコルの基本
・CAN通信いろいろ
・CANについて
・CAN(controller area network)
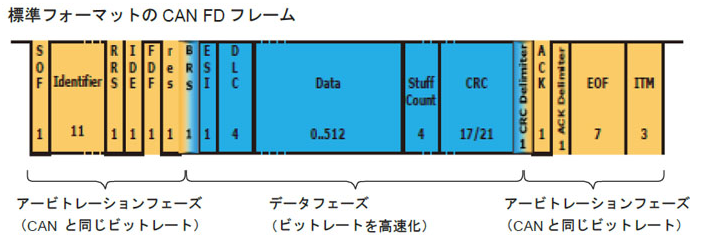
CAN FDの概要
既存のCANではビットレートもデータ長も足りていないため、両方を改善したのが CAN FD である。
- CAN IDなどは通常のCANと同様のビットレート
- データ部は**最大512bit(64byte)**に拡張
-
データ部だけビットレートを上げることができる(Flexible DataRate → FD)
はじめてのCAN/CAN FD
次世代の車載ネットワーク「CAN FD」とは
CAN FD(CAN with Flexible Data Rate)とは
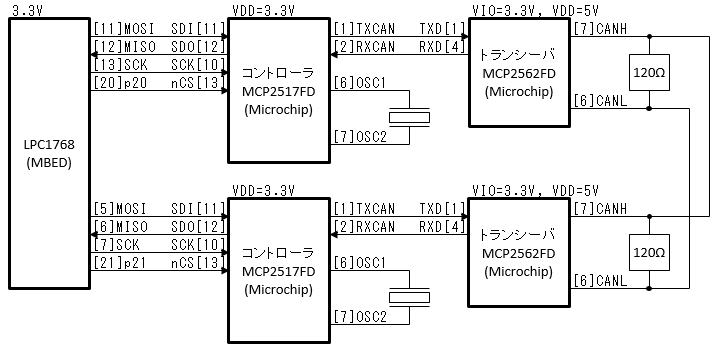
ハード構成
自分で送信したCAN FDのフレームを自分で受信する。
| 部品 | 購入元 | マニュアル | 補足資料 |
|---|---|---|---|
| CANコントローラ | MCP2517FD-H/SL | 20005688B_JP.pdf | 20005678B_JP.pdf |
| CANトランシーバ | MCP2562FD-E/P | 20005284A_JP.pdf | |
| オシレータ | セラミック発振子 40MHz | ||
| 終端抵抗 | 120Ω | ||
| パスコン | セラミックコンデンサ 0.1μF |
クロック生成
40MHz/20MHz/4MHz の外付け水晶振動子、セラミックレゾネータ、外部クロックが使える。
4MHzの場合PLLで10逓倍の40MHzにできる。特に理由がなければ40MHzか4MHzがよいだろう。
| 最高ビットレート | SPI最高通信速度 | |
|---|---|---|
| 40MHz or 4MHz(x10) | 8.0Mbps | 20.0Mbps |
| 20MHz | 6.7Mbps | 10.0Mbps |
以下が使えることを確認済み
・セラミック発振子 コンデンサー内蔵タイプ 40MHz
・セラミック発振子 コンデンサー内蔵タイプ 20MHz
・水晶発振子 20MHz と セラミックコンデンサ(20pFくらい) x 2個
・水晶発振子 4MHz と セラミックコンデンサ(20pFくらい) x 2個
MCP2517FDの制御
MCP2517FDのデータシートは以下の2つがある。
20005688B_JP.pdf : ハードやレジスタの仕様
20005678B_JP.pdf : 補足資料
SPIインターフェース
使ったコマンドは「Reset」「Read」「Write」の3つ。
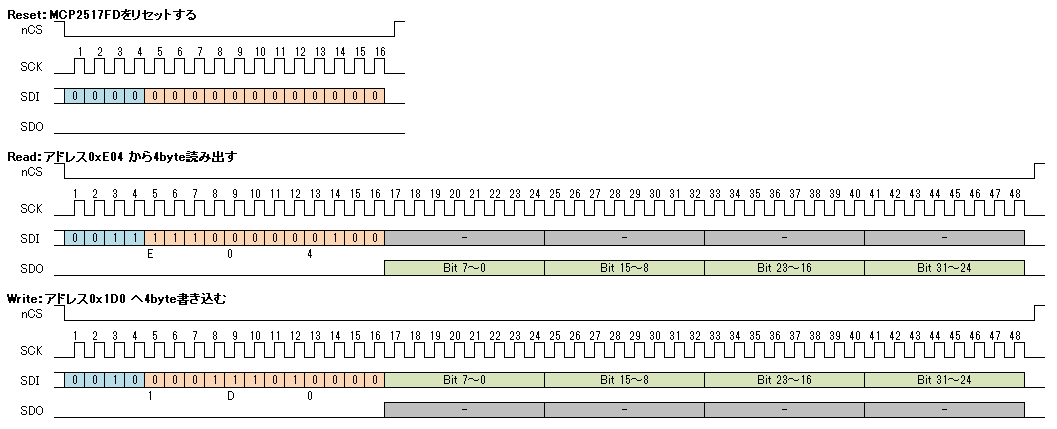
SPIのクロックはSYSCLKの半分まで上げることができる。4MHzの水晶を使う場合のみ注意が必要で、
リセットからPLLのONまでの間は4MHz/2の2MHzが上限である。
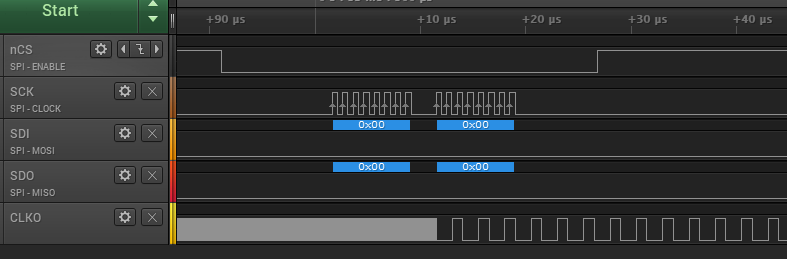
上記はリセットコマンド発行時のSPIとCLKOの波形である。
マニュアルにはnCSのHIGHでリセットと書いてあるが、コマンドを書き込んだ時点でリセットがかかって
CLKODIVが10分周に戻ってるように見える。。。
初期設定
定格ビットレート: 500kbps
データ ビットレート: 2Mbps
TEF & TXQ: 使わないので無効化
FIFO1: 受信用
FIFO2: 送信用
フィルタ0: FIFO1に振り分け、全CAN IDを受け入れ
トランスミッタ遅延補償: 自動設定、TDCO=DBRP×DTSEG1
CRCとRAMのECCチェック: 使用しない
| レジスタ | 設定値 | 説明 |
|---|---|---|
| OSC | 0x00000001 0x00000000 |
オシレータが4MHz: PLL=1 オシレータが4MHz以外: PLL=0 |
| C1NBTCFG | 0x003E0F0F 0x00160F0F |
SYSCLKが40MHz: BRP=1, TSEG1=63, TSEG2=16, SJW=16 SYSCLKが20MHz: BRP=1, TSEG1=23, TSEG2=16, SJW=16 |
| C1DBTCFG | 0x000E0303 0x00060101 |
SYSCLKが40MHz: BRP=1, TSEG1=15, TSEG2= 4, SJW= 4 SYSCLKが20MHz: BRP=1, TSEG1= 7, TSEG2= 2, SJW= 2 |
| C1TDC | 0x00020F00 0x00020700 |
SYSCLKが40MHz: TDCMOD=2, TDCO=15, TDCV=0 SYSCLKが20MHz: TDCMOD=2, TDCO=7, TDCV=0 |
| C1FIFOCON1 | 0xE7600400 | FIFO1: ペイロード=64byte, FIFO=8段, 受信FIFO |
| C1FLTCON0 | 0x00000081 | Filter0=許可, Filter0をFIFO1に振り分け |
| C1FIFOCON2 | 0xE3600480 | FIFO2: ペイロード=64byte, FIFO=4段, 送信FIFO |
| C1CON | 0x00000760 | REQOP=000, TXQEN=0, STEF=0 |
ビットレート
C1NBTCFG・C1DBTCFG に指定する BRPとTSEG1、TSEG2の値からビットレートが決まる。
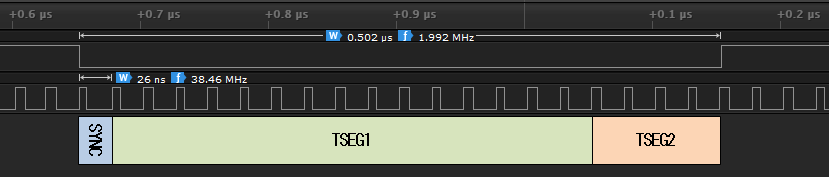
上記は SYSCLK 40MHz, BRP=1, TSEG1=15, TSEG2=4 の例。
(SYSCLK / BRP) / (SYNC + TSEG1 + TSEG2) = (40MHz / 1) / (1 + 15 + 4) = 2Mbps
マニュアルにはBRPをなるべく小さくとあるので1にした。
SJWはなるべく大きくと記載されているのでTSEG2と同じ値にした。
SJWに指定できる値は制限がある: SJW ≤ min(DPHSEG1, DPHSEG2)。
マニュアルではTSEG1とTSEG2の値の割合をTSEG2までのTQが80%になるように調整している。
(SYNC+TSEG1) / (SYNC+TSEG1+TSEG2) = 80%
CAN IDフィルタ
CiFLTOBJm と CiMASKm で受信対象のCAN IDをフィルタリングできる。
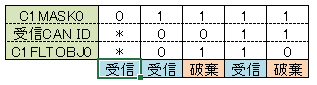
比較はビット単位で行われ CiMASKm が0のビットは常に受け入れる。
CiMASKm が1のビットは CAN ID と CiFLTOBJm のビットが比較され、一致すると受け入れられる。
0x4** のCAN IDを受け入れるなら CiMASKm を 0x700 に CiFLTOBJm を 0x400 にする。
全CAN IDを受け入れるなら CiMASKm を全て0にすればよい。
メッセージ送信
- C1FIFOSTA2 を読み出し、FIFOに空きがあることを確認(TFNRFNIF==1)
- C1FIFOUA2 を読み出し、送信FIFOのアドレスを取得
- 0x400 + アドレス + 0 にCAN IDを書き込み
- 0x400 + アドレス + 4 にDLCなどを書き込み
- 0x400 + アドレス + 8 以降に送信データを書き込み
- C1FIFOCON2 のTXREQとUINCを1にして書き込み(転送を開始し、FIFOを進める)
メッセージ受信
- C1FIFOSTA1 を読み出し、FIFOにデータがあることを確認(TFNRFNIF==1)
- C1FIFOUA1 を読み出し、受信FIFOのアドレスを取得
- 0x400 + アドレス + 0 からCAN IDを読み出し
- 0x400 + アドレス + 4 からDLCなどを読み出し
- 0x400 + アドレス + 8 以降からDLC分だけデータを読み出し
- C1FIFOCON1 のUINCを1にして書き込み(読み出し済みのバッファを空ける)
動作結果
期待通りデータ部のbpsが上がっている。
Saleae のロジックアナライザで波形を取得した。
CAN FDには対応していないが、プラグイン を追加すれば解析できるようになる。
VisualStudio2017でビルドしたものは こちら。CANFD.dllをどこか適当な場所に置き、
Options → Preferences → Developer にCANFD.dllを置いたフォルダのパスを指定し、ソフトを再起動する。
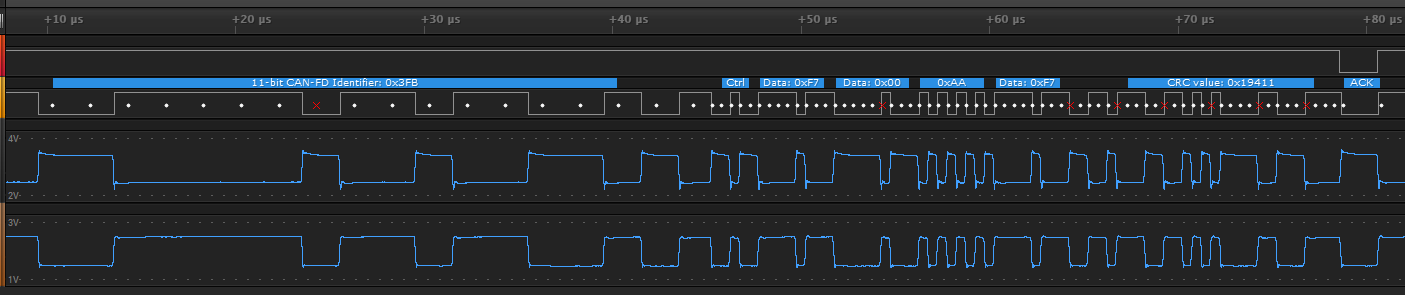
・CAN ID :11bit 0x3FB
・DLC :4
・Data :F7 00 AA F7
・フレームフォーマット :FDF=1
・ビットレート スイッチ:BRS=1
64byteの転送にかかった実測時間
SOF から ITM までの時間を計測した結果。
データによってはビットスタッフィングでフレーム全体の時間が延びるため、
最短時間はデータ部を0xAAで埋めてスタッフビットが入らないように計測し、
最長時間はデータ部を0x00で埋めてなるべくスタッフビットが入るようにした。
| フォーマット | ビットレート | データ長 | 転送時間 | CANとの速度差 |
|---|---|---|---|---|
| CAN | 500kbps | 8 | 219us ~ 250us | - |
| CAN | 500kbps | 64 | 1752us ~ 2000us (8byte x 8回) | - |
| CAN FD | 500kbps+2Mbps | 64 | 331us ~ 386us | 5倍 |
| CAN FD | 500kbps+5Mbps | 64 | 166us ~ 190us | 10倍 |
| CAN FD | 500kbps+8Mbps | 64 | 124us ~ 141us | 14倍 |
計測した結果 CAN FD のほうが2Mbpsでも5倍、5Mbpsなら10倍速い。
車載の開発でCANリプロ(ソフトウェア更新)をすると、CANの遅さがボトルネックとなって
大変時間かかるので、もっとCAN FDを採用してほしいと思う。