WSLでNav2
WSLでNavigation2のインストールと動作メモ
関連記事
Nav2のインストール
Nav2のインストール
sudo apt install ros-foxy-navigation2 ros-foxy-nav2-bringup
turtlebot3のシミュレータをインストール
sudo apt install ros-foxy-turtlebot3-*
source /opt/ros/foxy/setup.bash
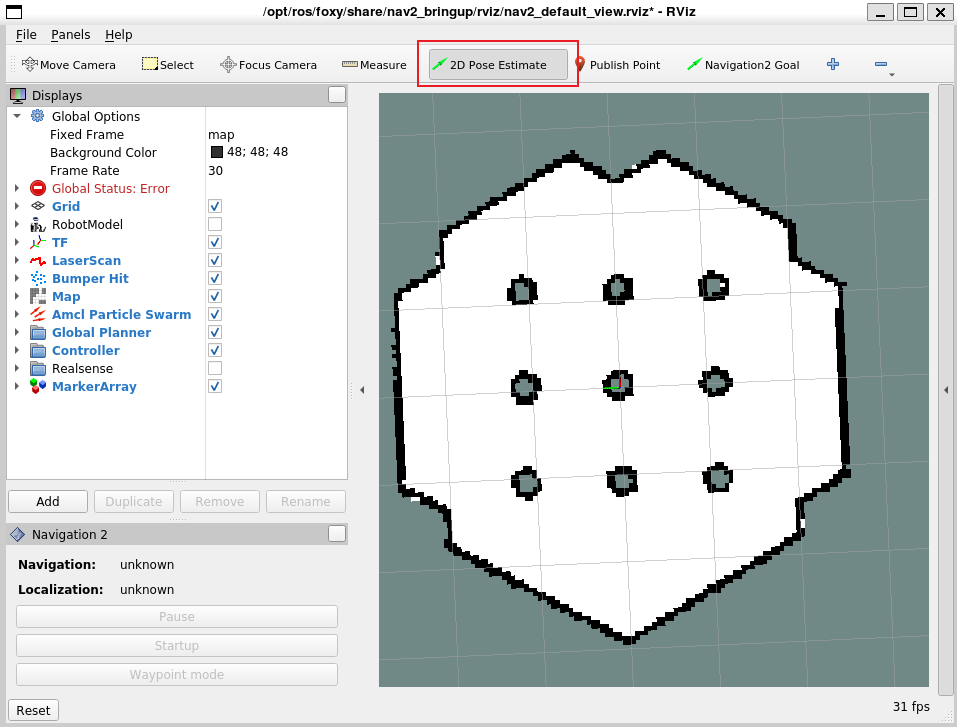
Nav2の起動
export TURTLEBOT3_MODEL=waffle_pi
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/foxy/share/turtlebot3_gazebo/models
ros2 launch nav2_bringup tb3_simulation_launch.py
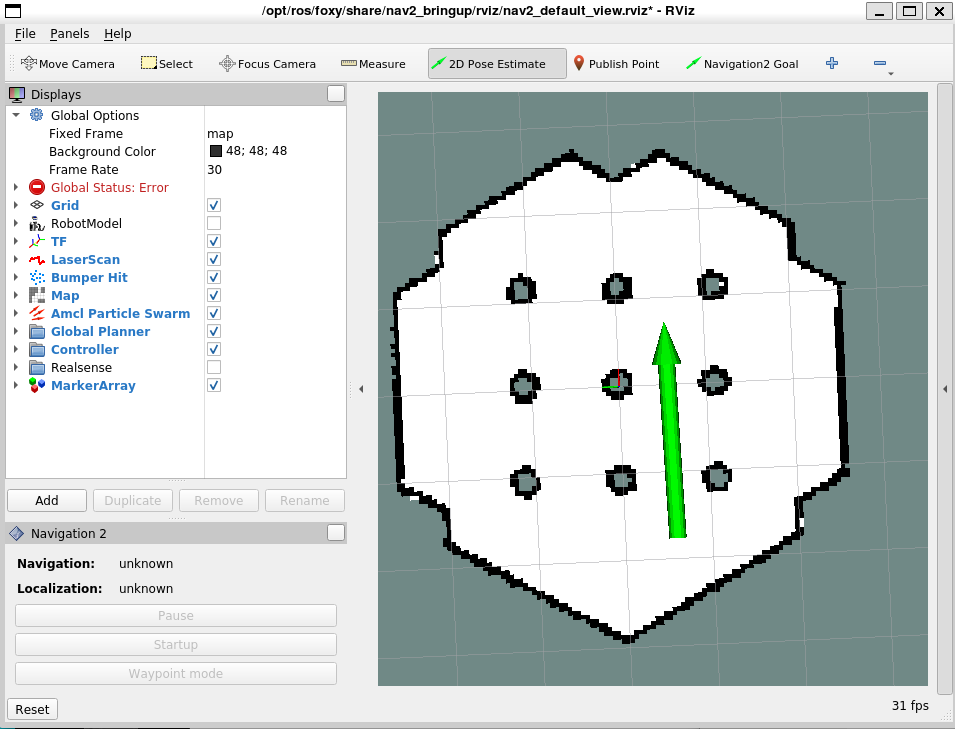
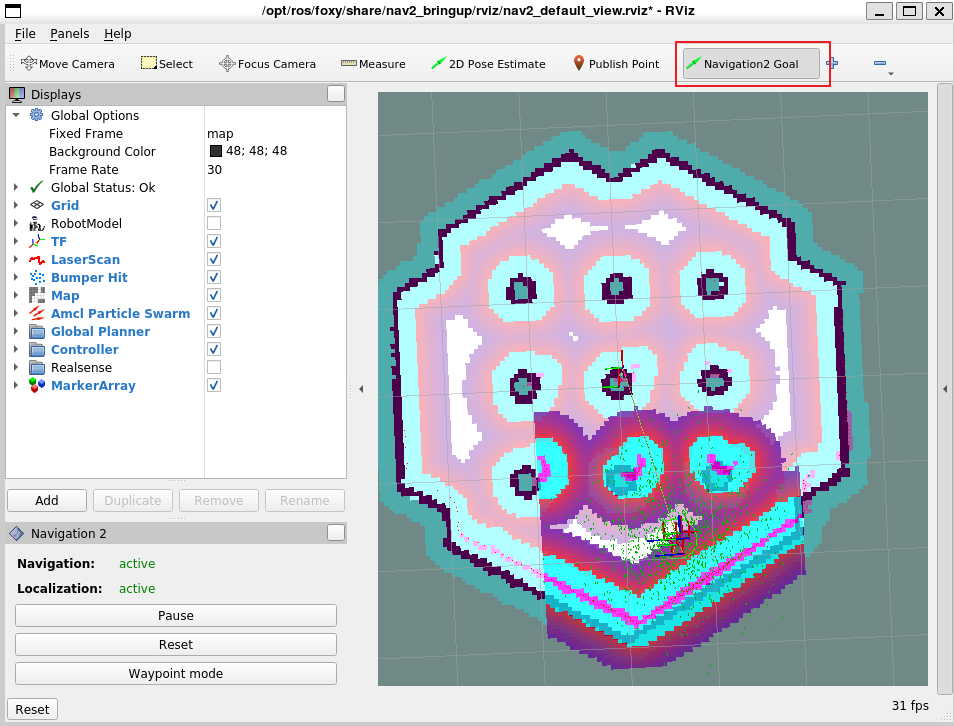
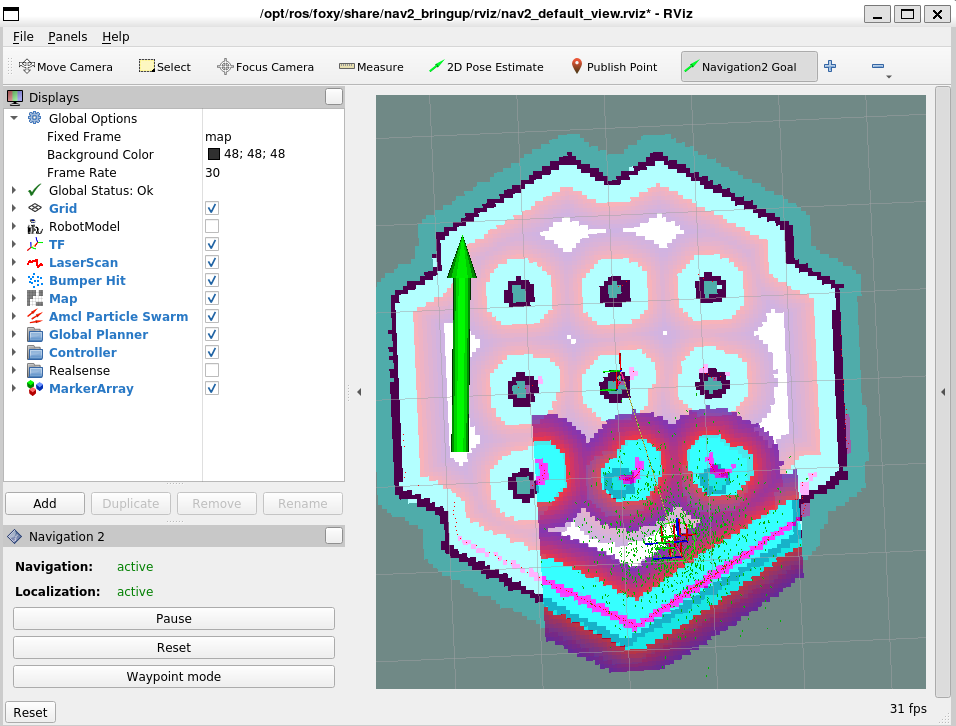
操作