計算でカメを追尾
今回は2匹のカメをプログラムで動かしてみます。
ロジックを少し複雑にするために、**「カメA(親ガメ)をカメB(子ガメ)が自動で追いかける」**という「追従走行(Following)」のプログラムに挑戦してみましょう。
これには、**「数学(三角関数)」**を使って、相手との距離と方向を計算するロジックが必要になります。
準備:2匹目のカメを出現させる
まずは、追いかけられる側の「カメ2」を画面に出現させましょう。ターミナルから以下のコマンドを打つだけでOKです。
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2.0, y: 2.0, theta: 0.0, name: 'turtle2'}"
これで画面に turtle2 が現れます。
追従ロジックの考え方
カメ1(自分)がカメ2(相手)を追いかけるには、毎秒ごとに以下の計算を行います。
- 距離の計算: $dist = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2}$
-
方向の計算: 相手が自分のどの方向にいるかを
atan2関数で求めます。 - 速度の決定: 距離が遠ければ速く進み、方向がズレていれば急旋回します。
Pythonコードの作成
~/ros2_ws/src/my_robot_controller/my_robot_controller/turtle_follower.py という新しいファイルを作成し、以下のコードを書き込んでください。
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
import math
class TurtleFollower(Node):
def __init__(self):
super().__init__('turtle_follower')
# 自分の位置(turtle1)と相手の位置(turtle2)を購読
self.pose1 = None
self.pose2 = None
self.sub1 = self.create_subscription(Pose, '/turtle1/pose', self.pose1_callback, 10)
self.sub2 = self.create_subscription(Pose, '/turtle2/pose', self.pose2_callback, 10)
# 自分の移動命令を送るパブリッシャ
self.pub = self.create_publisher(Twist, '/turtle1/cmd_vel', 10)
self.timer = self.create_timer(0.1, self.control_loop)
def pose1_callback(self, msg): self.pose1 = msg
def pose2_callback(self, msg): self.pose2 = msg
def control_loop(self):
if self.pose1 is None or self.pose2 is None:
return
# 1. 相手との相対距離と角度を計算
diff_x = self.pose2.x - self.pose1.x
diff_y = self.pose2.y - self.pose1.y
distance = math.sqrt(diff_x**2 + diff_y**2)
# 相手の方向(ラジアン)
target_angle = math.atan2(diff_y, diff_x)
# 自分の向きとの差分
angle_error = target_angle - self.pose1.theta
# 角度の補正(-πからπの範囲に収める)
while angle_error > math.pi: angle_error -= 2.0 * math.pi
while angle_error < -math.pi: angle_error += 2.0 * math.pi
msg = Twist()
if distance > 1.0: # 距離が1.0以上なら追いかける
msg.linear.x = min(1.5, 0.5 * distance)
msg.angular.z = 4.0 * angle_error
if abs(angle_error) > 0.5: # 約30度以上ズレていたら
msg.linear.x *= 0.1 # ほぼ止まって向きを直す
else:
msg.linear.x = 0.0
msg.angular.z = 0.0
self.pub.publish(msg)
def main():
rclpy.init()
rclpy.spin(TurtleFollower())
rclpy.shutdown()
Geminiの解説
このプログラムは、ROS2の応用編として非常に面白い**「追従(フォロー)システム」です。
一言でいうと、「turtle1(自分)が、turtle2(相手)の位置を追いかける」**という、まるで健気なペットのような動きをするアルゴリズムです。
これまでのコードと違い、**「2つの異なる情報(自分と相手の場所)を組み合わせて、次の動きを決める」**のが最大の特徴です。
🧭 このプログラムの「作戦」
このコードは、数学(三角関数)を使って「相手がどっちにいて、どれくらい離れているか」を計算しています。
情報を2つ集める(Subscriber)
self.sub1 = self.create_subscription(Pose, '/turtle1/pose', self.pose1_callback, 10)
self.sub2 = self.create_subscription(Pose, '/turtle2/pose', self.pose2_callback, 10)
-
/turtle1/pose: 自分の現在地 -
/turtle2/pose: 追いかける相手の現在地 - コールバック関数(
pose1_callbackなど)で、届いたデータをself.pose1などの変数に保存しておきます
数学で「進むべき道」を計算する
control_loop の中身がこのプログラムの心臓部です。
① 距離を測る(三平方の定理)
$$distance = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2}$$
math.sqrt(diff_x**2 + diff_y**2) で、自分と相手が何メートル離れているかを計算します。
② 角度を測る(アークタンジェント)
target_angle = math.atan2(diff_y, diff_x)
相手が自分の「真上」にいるのか「右下」にいるのか、相手がいる方角を割り出します。
③ 自分の向きとの「ズレ」を出す
angle_error = target_angle - self.pose1.theta
「相手がいる方向」から「今の自分の向き」を引き算して、あと何度回転すれば相手の正面を向けるかを計算します。
P制御(比例制御)でなめらかに動かす
ここが最もエンジニアらしい部分です。
msg.linear.x = 1.5 * distance # 遠いほど速く
msg.angular.z = 6.0 * angle_error # ズレているほど急旋回
単に「進め」ではなく、**「誤差(距離や角度のズレ)が大きいほど、出力を強くする」**というルールにしています。
- 相手が遠くにいれば猛ダッシュし、近づくとゆっくりになります
- 向きが大きくズレていれば急ハンドルを切り、正面を向いたらハンドルを戻します
📝 注目ポイント:角度の補正(おまじない)
while angle_error > math.pi: angle_error -= 2.0 * math.pi
while angle_error < -math.pi: angle_error += 2.0 * math.pi
これはロボットプログラミングの「あるある」を防ぐコードです。
例えば、自分が +179度 を向いていて、相手が -179度 の方向にいた場合、引き算すると 358度 も回転しようとしてしまいます(ほぼ1回転)。でも実際は、反対側にあと 2度 回るのが最短ルートですよね。
このコードは、常に**「最短距離で相手の方を向く」**ための補正をしています。
🚀 実際に動かすには?
- まず
turtlesimを立ち上げて、1匹目のカメ(turtle1)を表示します -
turtle2を出現させる必要があります。(ターミナルからros2 service call /spawn ...と打つか、別のプログラムで作成します) - その状態でこのプログラムを動かすと、turtle1がturtle2に向かって突進していきます
- 別のターミナルから
turtle2をキーボード操作で動かしてみると、turtle1が一生懸命ついてくるはずです!
💡 試してほしいこと
msg.linear.x = 1.5 * distance の 1.5 という数字(ゲインと呼びます)を 0.5 にしたり 5.0 にしたりすると、追いかけ方の「性格」が変わります。
- 小さくすると、のんびりした動きになります
- 大きくしすぎると、勢い余って相手を通り過ぎ、ガクガクと激しい動きになります
実行してテストする
1. setup.py に新しいスクリプト turtle_follower を登録してビルドします。
~/ros2_ws/src/my_robot_controller/setup.pyのentry_pointsの中に以下の一行を追加します
'turtle_follower = my_robot_controller.turtle_follower:main',
追加の内容は以下の通りです。
- '実行したいコマンド名 = パッケージ名.ファイル名:関数名'
- 実行したいコマンド名: ros2 run の後に打つ名前になります。
- パッケージ名: 今回は my_robot_controller です。
- ファイル名: 作成した turtle_follower.py です(拡張子 .py は抜き)。
- 関数名: プログラムの最後にある def main(): を指します。
追加するときに前の行の最後に「,」を付けるのを忘れずに!
from setuptools import find_packages, setup
package_name = 'my_robot_controller'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='nomura',
maintainer_email='nomura@todo.todo',
description='ROS 2 turtle controller and follower',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# 1匹目のカメのノード(既存)
'my_turtle_node = my_robot_controller.my_turtle_node:main',
# 2匹目のカメの追従ノード(今回追加)
'turtle_follower = my_robot_controller.turtle_follower:main',
],
},
)
cd ~/ros2_ws
colcon build
source install/setup.bash
ros2 run my_robot_controller turtle_follower
2. このプログラムを実行すると、カメ1がカメ2に向かって突進し、手前でピタッと止まります
と、Geminiからは言われたのですが、円を描いていたり、通り過ぎたりで思ったほどうまく動きません…
けっこういろいろと時間がかかって追いつくって感じですね。
ピタッと止まりますって感じではないです。
気になってGeminiでプログラムのアルゴルを確認しましたが、完ぺきなアルゴルと言われましたw
3. 別のターミナルで turtle_teleop_key を turtle2 に対して実行し、カメ2を逃がしてみてください
# turtle2を操作するコマンド
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel
カメ2をキーボードで動かすと、カメ1が一生懸命追いかけてくるはずです!
これで、「複数の情報を統合して判断を下す」という、かなり高度なプログラムが書けました。
自力計算からTF2へ
ROS 2の最重要機能の一つ、**TF2(Transform Library)**に足を踏み入れます。
これまでは「相手の $x, y$ 座標を引き算して、距離を $\sqrt{x^2+y^2}$ で計算して…」と自力で計算していましたが、TF2を使うと「カメ2から見たカメ1の相対位置を教えて!」と一言頼むだけで、複雑な行列計算をすべてROS 2が裏側で代行してくれます。
TF2のイメージ:動く座標系
TF2は、各ロボットに「座標の十字架(フレーム)」を貼り付けるイメージです。
-
world: 画面全体の動かない中心点 -
turtle1: カメ1と一緒に動く座標系 -
turtle2: カメ2と一緒に動く座標系
準備:座標情報を「放送」する
TF2を使うには、まず各カメが「今、自分はここにいるよ!」と座標情報を放送(Broadcast)する必要があります。
本来は放送用のコードを書くのですが、まずは手っ取り早く公式のデモパッケージを使って「TF2のすごさ」を体験してみましょう。
必要なパッケージのインストール
sudo apt update
sudo apt install ros-jazzy-turtle-tf2-py ros-jazzy-tf2-ros ros-jazzy-tf2-geometry-msgs
実践:TF2で追いかけっこデモを起動
以下のコマンドを順番に、別々のターミナルで実行してください。
- デモの起動(カメが2匹出ます)
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
- カメ1をキーボードで動かす
ros2 run turtlesim turtle_teleop_key
カメ1を動かすと、カメ2が自動で追いかけてくるはずです。一見先ほどのプログラムと同じですが、中身は数学の計算式を使わず「TF2」に丸投げしています。
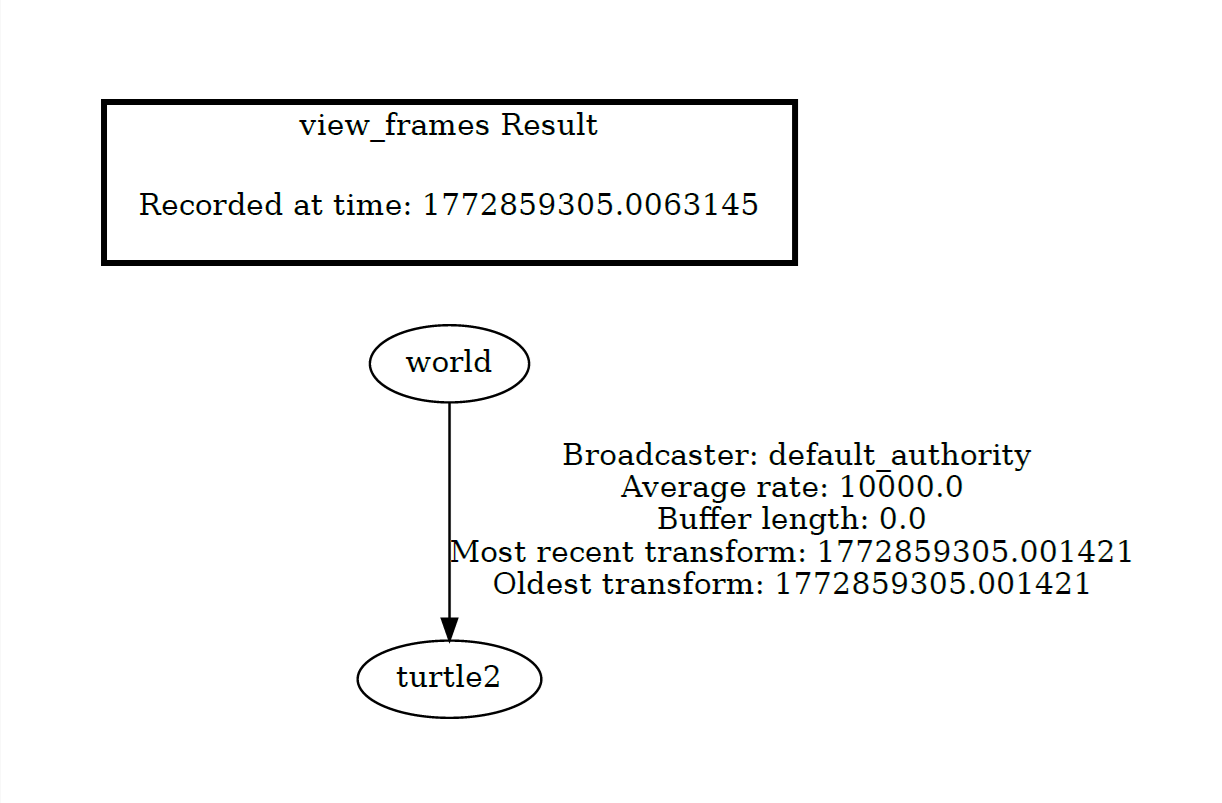
座標のつながりを可視化する(view_frames)
今、どんな座標の関係になっているかを図にしてみましょう。
ros2 run tf2_tools view_frames
実行すると frames.pdf というファイルが生成されます。これを開くと、「world → turtle1」や「world → turtle2」というツリー構造が見えるはずです。これがROSロボットの「体の構造」を表す設計図になります。
プログラムでどう書くのか?(概念)
もし自分でコードを書くなら、先ほどの複雑な math.sqrt や atan2 の部分は、たったこれだけになります。
# TF2に「turtle2から見たturtle1の相対位置」を聞く
trans = tf_buffer.lookup_transform('turtle1', 'turtle2', rclpy.time.Time())
# 距離や角度が勝手に出てくる!
dist = math.sqrt(trans.transform.translation.x**2 + trans.transform.translation.y**2)
angle = math.atan2(trans.transform.translation.y, trans.transform.translation.x)
**「数学を意識せず、座標系の名前だけ意識すればいい」**のがTF2のメリットです。
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
import tf2_ros
import math
class TurtleFollower(Node):
def __init__(self):
super().__init__('turtle_follower')
# TF2バッファとリスナーの設定
self.tf_buffer = tf2_ros.Buffer()
self.tf_listener = tf2_ros.TransformListener(self.tf_buffer, self)
# turtle2の移動命令パブリッシャ
self.pub = self.create_publisher(Twist, '/turtle2/cmd_vel', 10)
# 制御ループ(10Hz)
self.timer = self.create_timer(0.1, self.control_loop)
def control_loop(self):
try:
# turtle2座標系から見たturtle1の位置をTF2で取得
trans = self.tf_buffer.lookup_transform(
'turtle2', # ターゲットフレーム(自分=追いかける側)
'turtle1', # ソースフレーム(追いかける相手)
rclpy.time.Time()
)
except (tf2_ros.LookupException,
tf2_ros.ConnectivityException,
tf2_ros.ExtrapolationException) as e:
self.get_logger().warn(f'TF2取得失敗: {e}')
return
# turtle2座標系での距離と角度誤差を計算
dist = math.sqrt(trans.transform.translation.x**2 + trans.transform.translation.y**2)
angle = math.atan2(trans.transform.translation.y, trans.transform.translation.x)
msg = Twist()
if dist > 0.5:
# 速度に上限を設ける
msg.linear.x = min(1.5, 0.5 * dist)
# 角度ズレが大きいときは回転優先、直進を抑制
msg.angular.z = 4.0 * angle
if abs(angle) > 0.5: # 約30度以上ズレていたら
msg.linear.x *= 0.1 # ほぼ止まって向きを直す
else:
msg.linear.x = 0.0
msg.angular.z = 0.0
self.pub.publish(msg)
def main():
rclpy.init()
rclpy.spin(TurtleFollower())
rclpy.shutdown()