原文
RNNを用いたブレーキトルクの制御 (Braking torque control using recurrent neural networks)
Ćirović Velimir (2012)
1. 要約/背景
- 深層学習の応用例として読む価値のある論文。
- ディスクブレーキが与えるブレーキトルクを予測することは、これまでの数学的モデルでは困難だった。
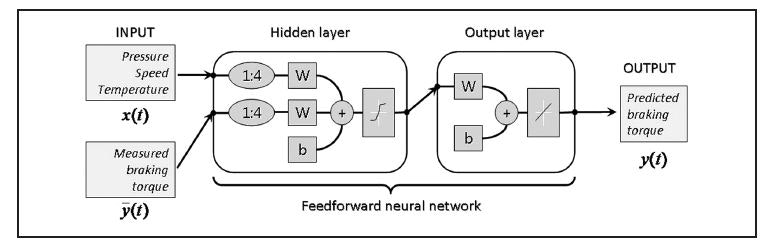
- 適用圧力、ディスク滑り速度、ブレーキ表面温度、といった因子を考え、ブレーキトルクとの関係性についてモデリングした。
- RNNを使うモチベーションは、過去時点の圧力・滑り速度・表面温度、およびトルクが現時点のトルクに影響するという物理学的見地による。
2. 骨子の理論
(1)NARXネットワーク(Non-linear AutoRegressive Network with eXogenous inputs)
自動回帰NNに非線形活性化関数を用いる。
教師データや出力を外部入力値(exogenus input)として、RNNに活かす構図である。


3. モデル適用例
7000あまりのデータをホールドアウトにより、約4000の学習データと、3000のテストデータに分ける。


入力ベクトルは、次式にしたがって、正規化の前処理を施した。
x_{(scal)} = x_{(scal)min} + \frac{x_{(real)} - x_{(real)min}}{x_{(real)max} - x_{(real)min}}(x_{(scal)max} - x_{(scal)min})
実測(real)の範囲に収まるように、計測値(scale)を正規化した。
筆者によると、正規化の目的は、入出力の値の範囲をコントロールすることで、予測範囲の限定化、予測精度の向上に繋げることである。
活性化関数は、$tanh$を用いた。
$$f(x) = \frac{1 - e^{-x}}{1 + e^{-x}}$$
下記に、ブレーキトルクの学習誤差率の分布を示す。
テストデータも汎化誤差少なく学習された。

予測例として、次の図は、内部圧力p = 23.5 bar, v = 18 km/hの時の、シミュレーションを表す。
実測のブレーキトルクに対する再現性が高いことが確認できる。
