Gazeboってなんぞ?
この記事にたどり着いている方は、Gazeboって何なのか、何ができるのかはすでにご存知かと思いますが、
概要を一応説明しておきます。
Gazeboは以下のような特徴を持っています。
- オープンソース(Apache ライセンス)の3Dロボットシミュレータ
- Qtを利用した強力なGUI
- 複数の物理エンジンを切り替えられる(ODE含む)
- カメラ、LRFなどのセンサシミュレーションが豊富
- センサだけでなく、ロボットモデルも豊富(TurtleBot、PR2etc…)
- ROSとの連携も充実 ←これ大事
という感じで、もはや使わない手はないロボットシミュレータです。
でも、どうやって使うの?
よっしゃ、では早速と思い、Gazeboのチュートリアルを読んだり(とりあえず日本語訳したこともあります...)、ROSのチュートリアルを読んだり(Gazeboチュートリアルに誘導されるだけですが...)したのですが、イマイチ具体的にどうしたらいいのかわかりませんでした...orz
そこで本記事では、CADでロボットを作ってから、それをGazeboで動かすところまで、私のノウハウを詰め込みたいと思います。
ただ、分量が多くなるので、いくつかの記事に分けたいと思います。
CAD設計からGazeboまでの流れ
- 完成までの手順 <-今ここ
- 好きなCADソフトを使ってSTLファイルを作る
- 好きなソフトを使ってCOLLADAファイルを作る
- URDFファイルを作る
- GazeboとROSの連携
- ros_controlについて
- 実際にlaunchしてみる
任意のモデルを作るためには、上記の手順で行います。
それぞれの手順について記事を書こうと思いますので、よろしくお願いします。
最終的には、こんな感じで、自分だけのモデルをlaunchできるようにする予定です。
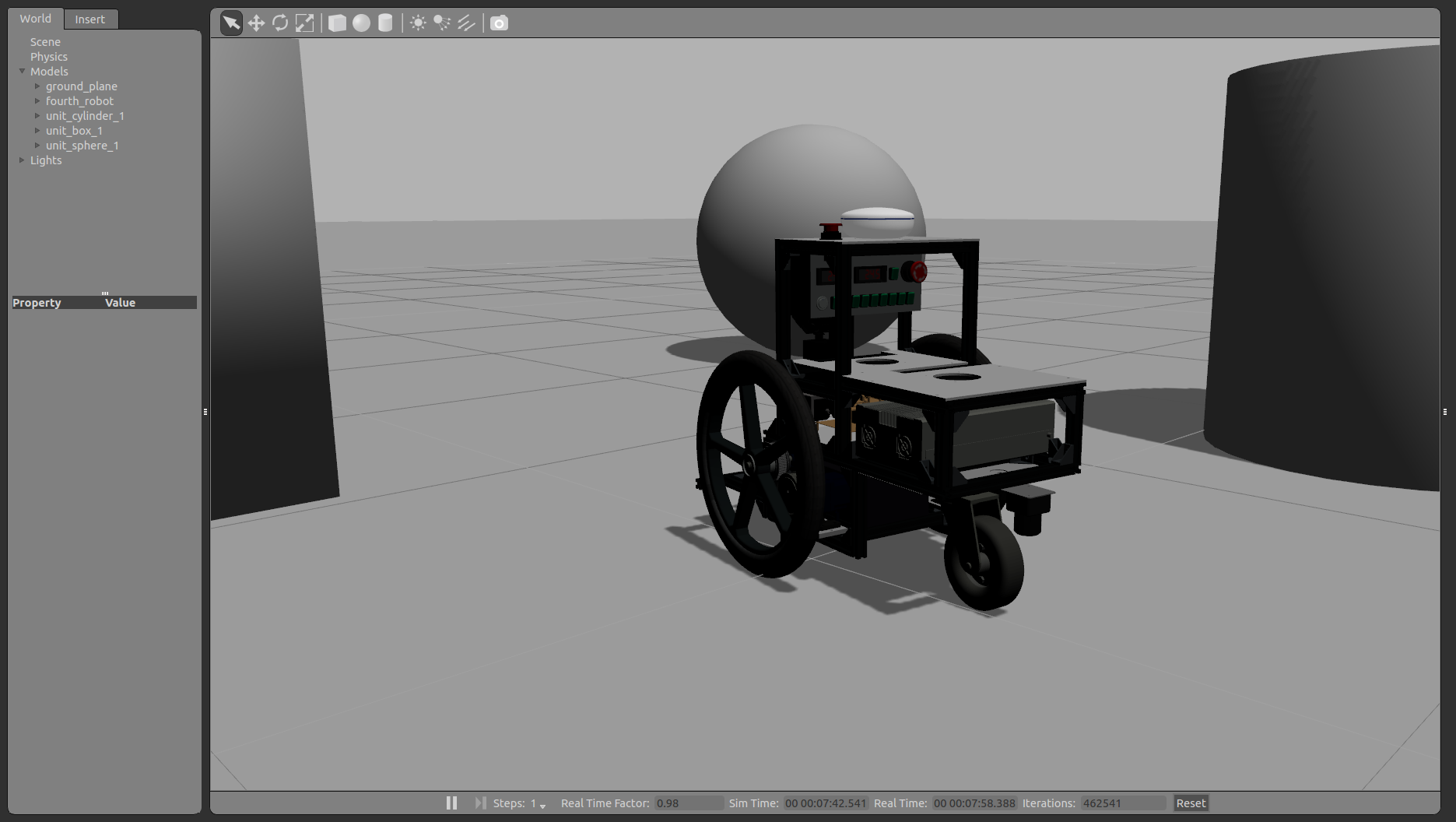
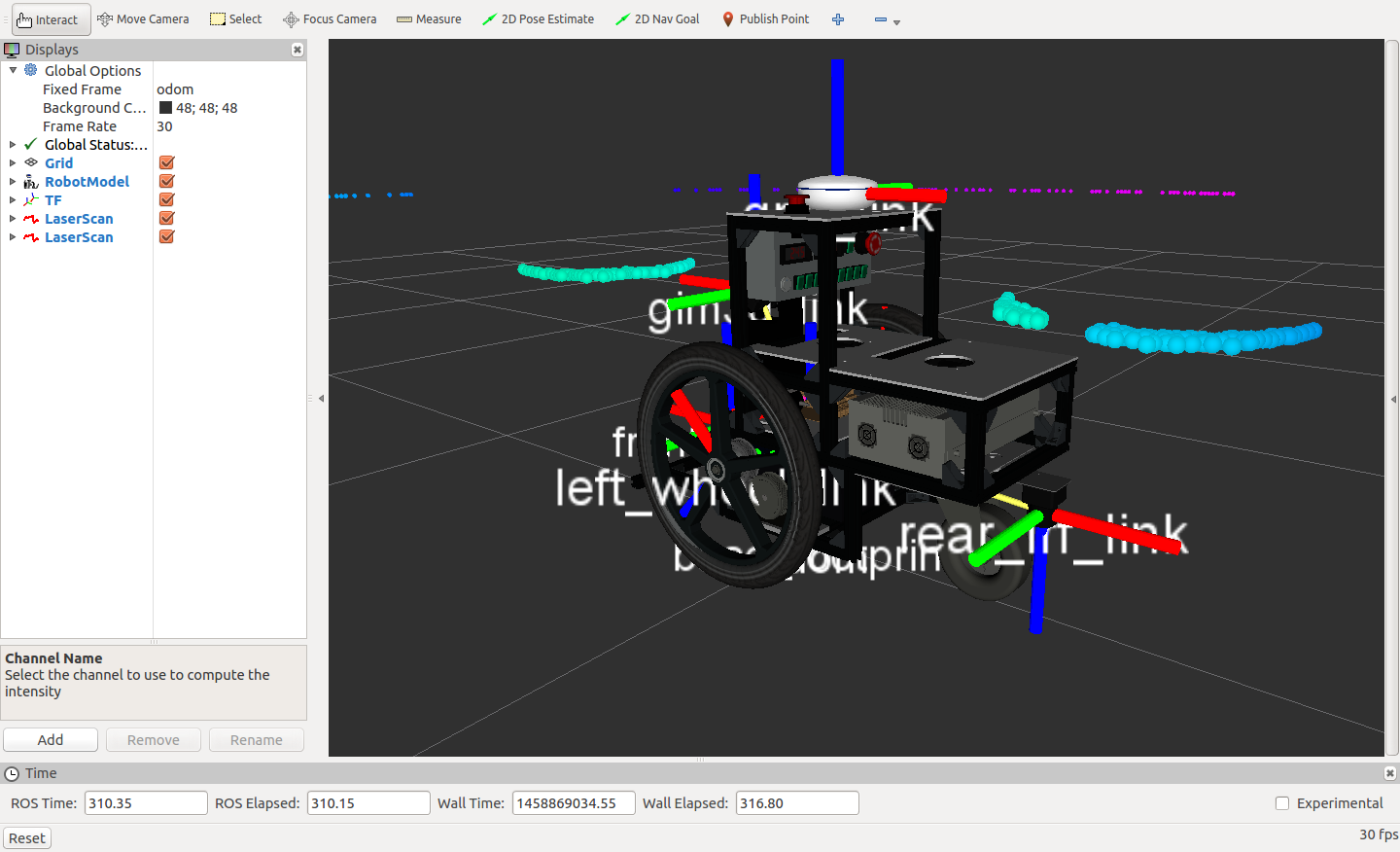
因みに、キャプチャのロボットについては、下記Githubにて公開しておりますので、よろしければご覧ください。
https://github.com/CIR-KIT/fourth_robot_pkg