DJI Robomaster Assistantについての情報がネットにあまりなかったので、M3508とM2006の設定画面のスクリーンショットを貼っていきます。
2024年6月9日にあったNHK学生ロボコンでも大量に使われていました。
M3508のユーザーガイド(ドキュメント)
接続方法などは、GM6020を解説した下のページを参考にしてください。
うまくつなぐと、認識されるので「ESC C620」を選択します。
「パラメーターの設定」タブ
「ベーシック」タブ
初期状態だと以下のようになっていました。翻訳がガバガバですね。
簡単な実験は、PWM制御で動かすのが楽なので、単方向モードから双方向モードに変えました。
PWMモードのPゲイン、Iゲイン、最大RPM、回転方向などが設定できます。

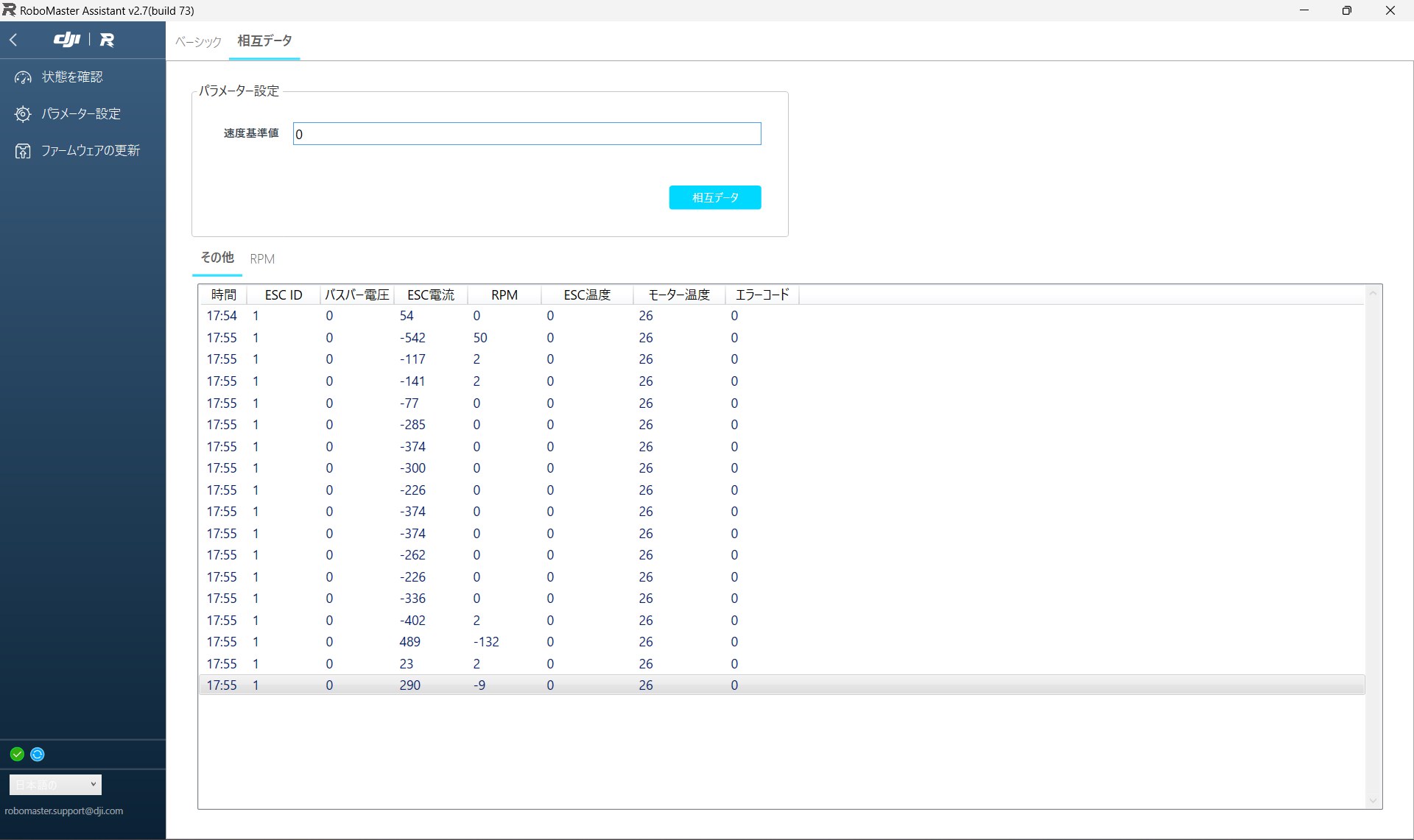
「相互データ」タブ
モーターの回転数などが、リアルタイムで確認できます。
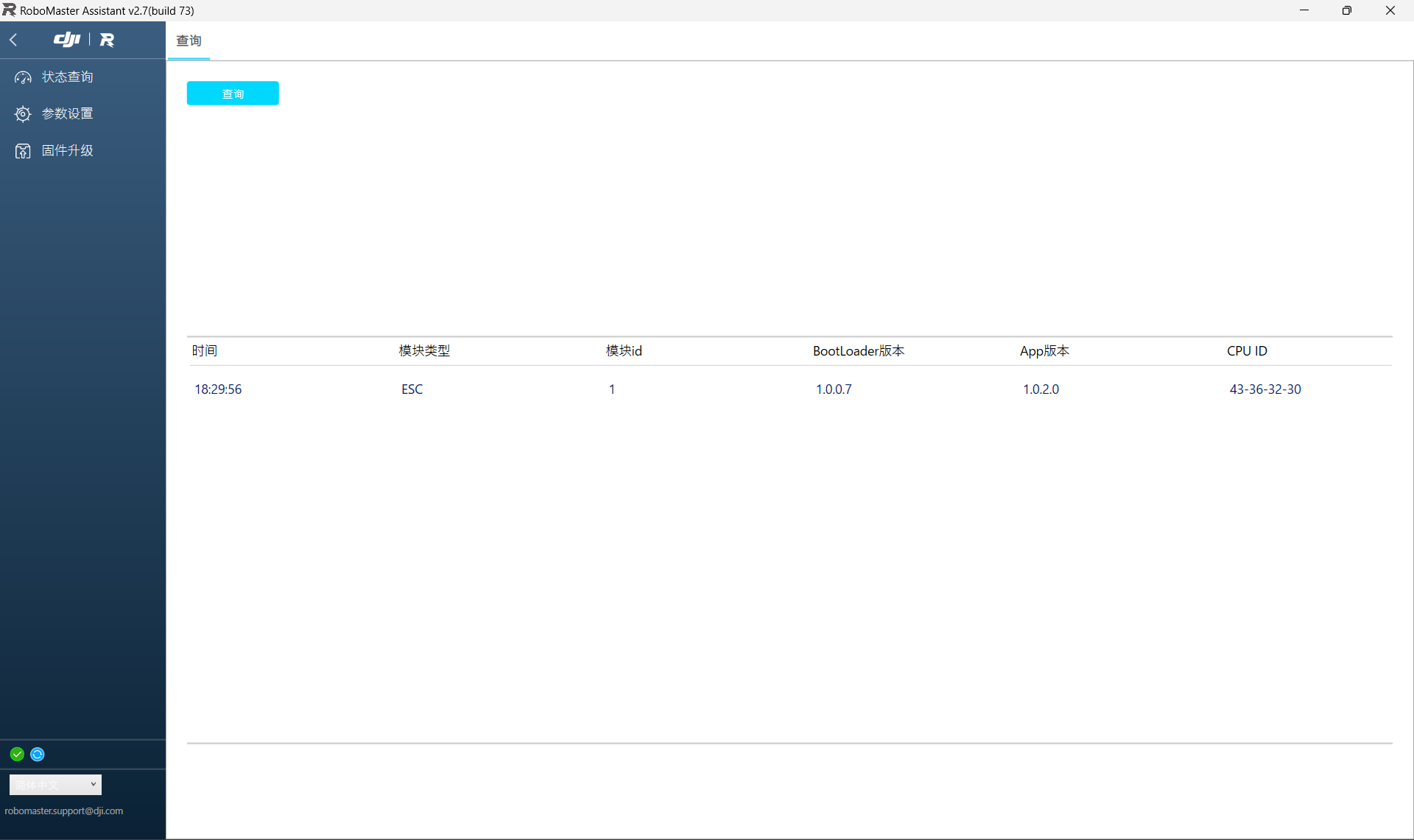
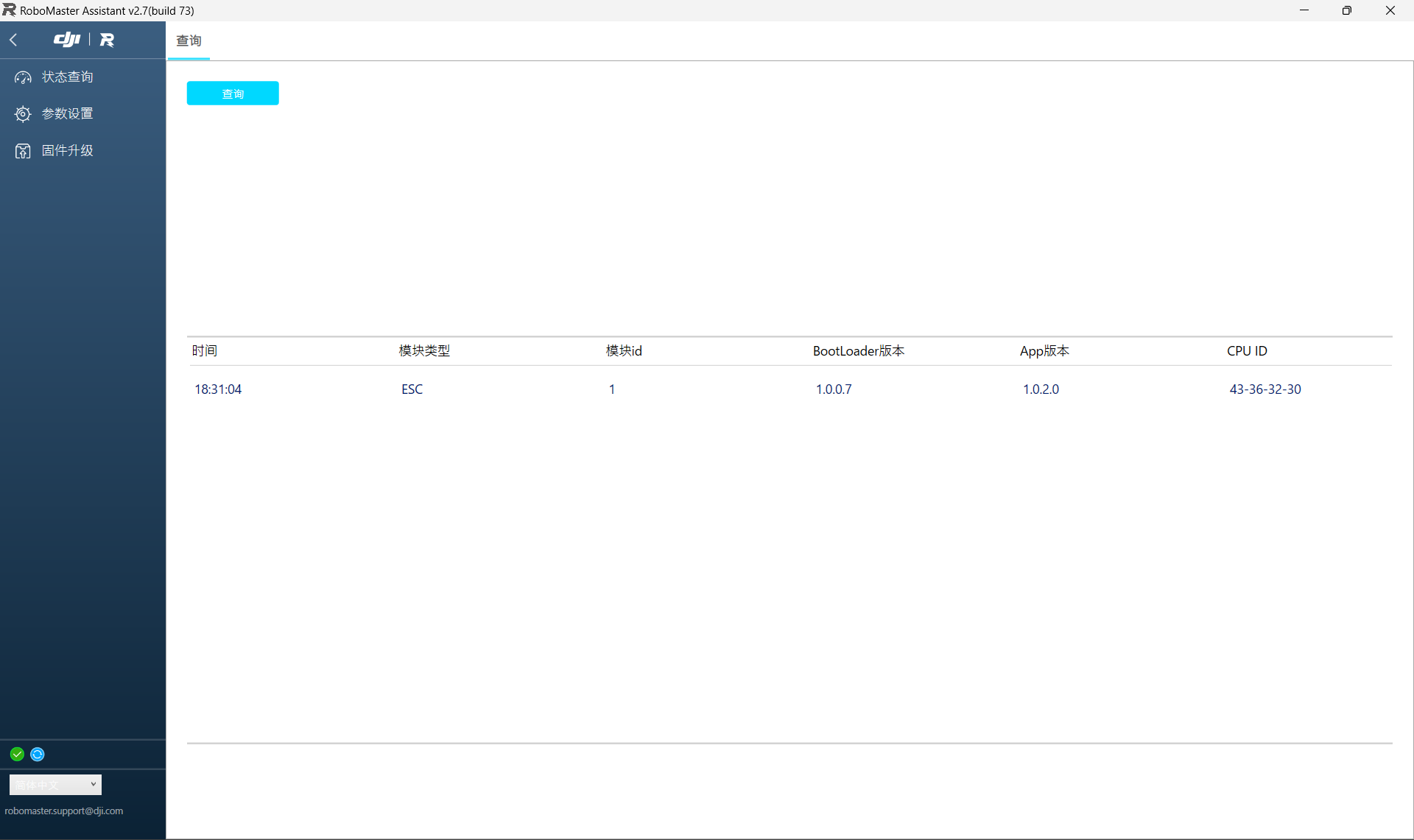
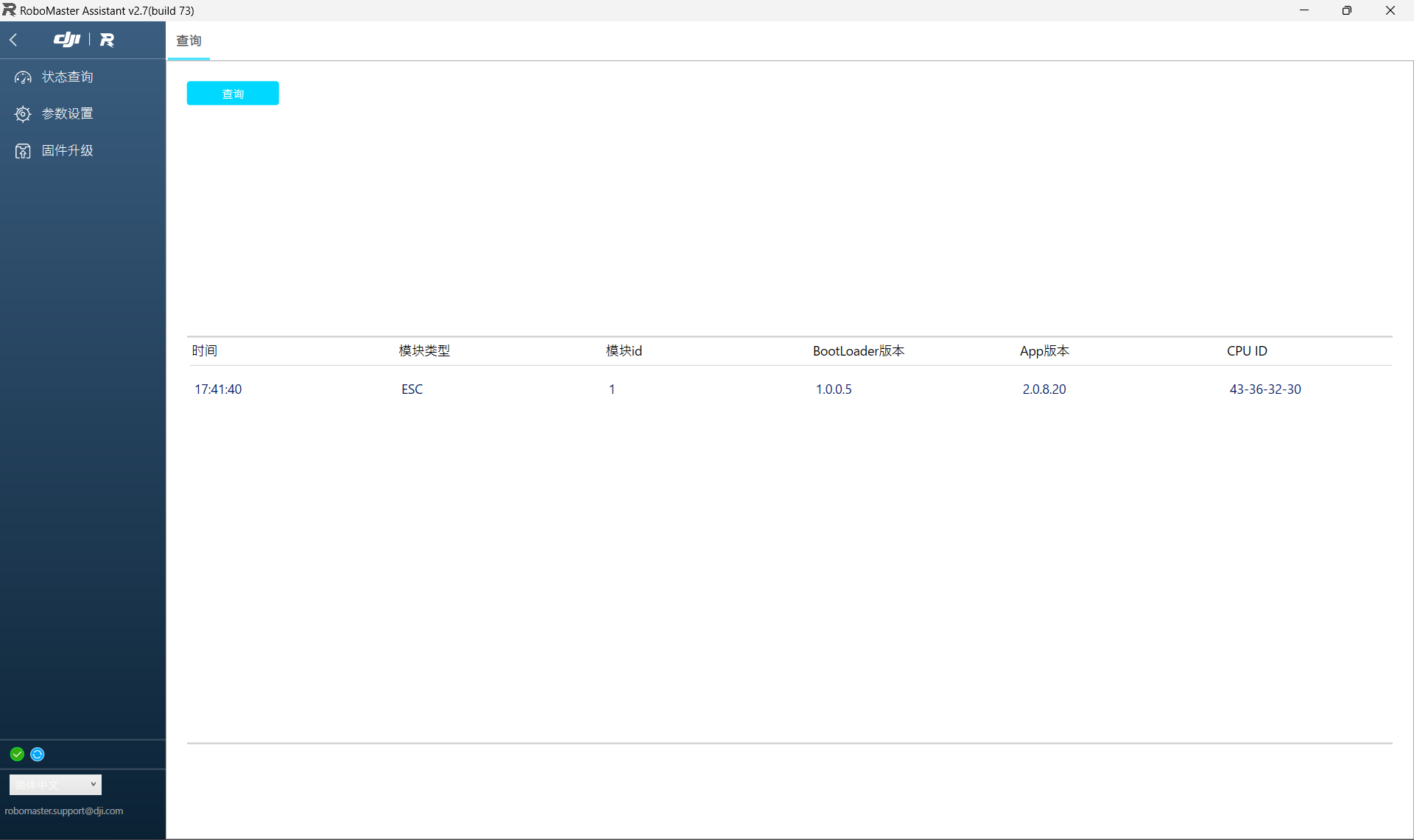
「ファームウェアの更新」タブ
初期状態でLatest version (2.0.8.20)であったので、アップグレードする必要はありませんでした。(2024年5月時点)

M2006
M2006はPWM制御に対応していないので、M3508やGM6020のように、PWM制御時のPゲインやIゲインを変えられるわけではないです。
ESCがCAN-BUSにフィードバックするメッセージの送信頻度のみを1KHz,500Hz,250Hz,125Hzから変えられるようです。デフォルトは1KHzでした。
| DATA | 内容 |
|---|---|
| DATA[0] | ローターの機械的角度 (上位8バイト) |
| DATA[1] | ローターの機械的角度 (下位8バイト) |
| DATA[2] | 回転速度 (上位8バイト) |
| DATA[3] | 回転速度 (下位8バイト) |
| DATA[4] | トルク電流 (上位8バイト) |
| DATA[5] | トルク電流 (下位8バイト) |
| DATA[6] | なし |
| DATA[7] | なし |