MobileNet-SSD-RealSense 
◆ 前回記事
◆ はじめに
前回の記事までで、Stickの本数を増やせば増やした分だけパフォーマンスアップする仕組みの構築は終わった。
Neural Compute Stick が 100GFLOPS で、TX2 が 2TFLOPS だから、NCSを20本挿せば勝てるのかな?
ともかくとして、 公式のフォーラム で各国のエンジニアが怒り騒いでいるネタとして、「熱暴走問題」が残っている。
USB2.0の転送レートの限界まで画像認識の性能をスペックアップできたとしても、長時間の可用性が担保できなければ使い物にならない、と。
どうも、スティックの内部温度が70℃〜75℃あたりに到達した時点で自己保全のためにパワースロットリングが自動で働いて、縮退運転モードに突入する仕様のようだ。
じゃあ、プンプン怒る前にテメエらでなんとかしろよ、お前らプロなんだろ、とか思うわけだが、一応、熱暴走回避のために、複数スティックをクラスタリングしながら、一定周期 あるいは 一定の内部温度をしきい値に、クラスタをシームレスに切り替える仕組みを実装してみた。
クラスタごとにクールダウンタイム(推論休止時間)を確保するのが狙いだ。
◆ 実装イメージ
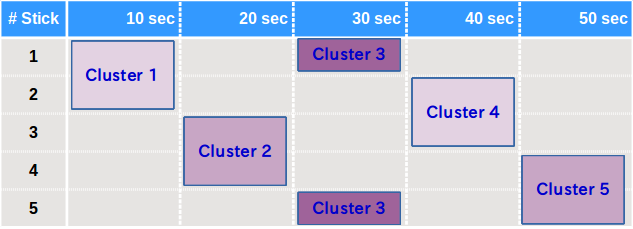
- MultiStickの複数並列推論のパフォーマンスを維持しつつ、一定数のスティックを1つのクラスタとしてグルーピングする。
- 一定周期(10秒や1分)ごとにアクティブクラスタをシームレスにスイッチする。
- スティックの内部温度を計測し、しきい値温度に到達したらアクティブクラスタをシームレスにスイッチする。
- クールダウンタイムを確保するため、インアクティブなスティックには推論を一切させない。
- アクティブなクラスタ内のスティックには全力で推論を継続させる。
<合計5本のスティックで2本づつクラスタリングしたイメージ>
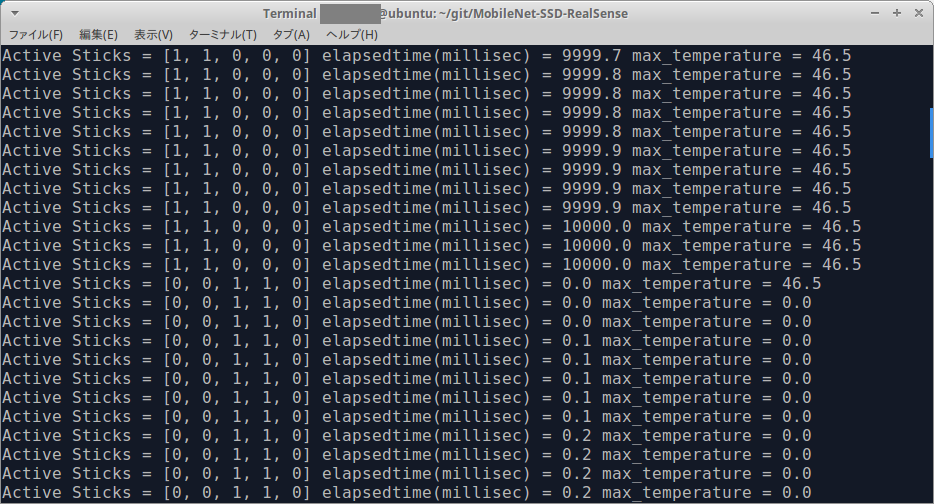
<クラスタスイッチングの様子、ほぼゼロタイムでクラスタスイッチしてパフォーマンスを落とすことなく推論を継続している>
ひとつのクラスタを構成するスティックの数を増やせば、推論のパフォーマンスを最大限発揮しつつクールダウンタイムを十分に確保できる、はず。
長時間駆動が必要な環境下では少しは使えるのではないだろうか。
◆ 実装
Github (MobileNet-SSD-RealSense) に詳細な仕様は書いておいたが、こちらにもロジックをそのまま貼っておく。
RealSenseを所有していなくても、USB Cameraだけで動く。
$ python3 MultiStickSSDwithRealSense.py -mod 1 -snc 2 -csc 10000 -cst 65.0
import sys
if sys.version_info.major < 3 or sys.version_info.minor < 4:
print("Please using python3.4 or greater!")
sys.exit(1)
import pyrealsense2 as rs
import numpy as np
import cv2, io, time, argparse, re
from mvnc import mvncapi as mvnc
from os import system
from os.path import isfile, join
from time import sleep
import multiprocessing as mp
pipeline = None
lastresults = None
threads = []
processes = []
frameBuffer = None
results = None
fps = ""
detectfps = ""
framecount = 0
detectframecount = 0
time1 = 0
time2 = 0
graph_folder = ""
cam = None
camera_mode = 0
camera_width = 320
camera_height = 240
window_name = ""
background_transparent_mode = 0
ssd_detection_mode = 1
face_detection_mode = 0
elapsedtime = 0.0
temperature = 0.0
max_temperature = 0.0
active_stick_pointer = 0
mp_active_stick_number = None
stick_num_of_cluster = 0
cluster_switch_cycle = 10000
cluster_switch_temperature = 65.0
background_img = None
depth_sensor = None
depth_scale = 1.0
align_to = None
align = None
LABELS = [['background',
'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair',
'cow', 'diningtable', 'dog', 'horse',
'motorbike', 'person', 'pottedplant',
'sheep', 'sofa', 'train', 'tvmonitor'],
['background', 'face']]
def camThread(LABELS, results, frameBuffer, camera_mode, camera_width, camera_height, background_transparent_mode, background_img):
global fps
global detectfps
global lastresults
global framecount
global detectframecount
global time1
global time2
global cam
global window_name
global depth_scale
global align_to
global align
# Configure depth and color streams
# Or
# Open USB Camera streams
if camera_mode == 0:
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
profile = pipeline.start(config)
depth_sensor = profile.get_device().first_depth_sensor()
depth_scale = depth_sensor.get_depth_scale()
align_to = rs.stream.color
align = rs.align(align_to)
window_name = "RealSense"
elif camera_mode == 1:
cam = cv2.VideoCapture(0)
if cam.isOpened() != True:
print("USB Camera Open Error!!!")
sys.exit(0)
cam.set(cv2.CAP_PROP_FPS, 37)
cam.set(cv2.CAP_PROP_FRAME_WIDTH, camera_width)
cam.set(cv2.CAP_PROP_FRAME_HEIGHT, camera_height)
window_name = "USB Camera"
cv2.namedWindow(window_name, cv2.WINDOW_AUTOSIZE)
while True:
t1 = time.perf_counter()
# 0:= RealSense Mode
# 1:= USB Camera Mode
if camera_mode == 0:
# Wait for a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
if frameBuffer.full():
frameBuffer.get()
color_image = np.asanyarray(color_frame.get_data())
elif camera_mode == 1:
# USB Camera Stream Read
s, color_image = cam.read()
if not s:
continue
if frameBuffer.full():
frameBuffer.get()
frames = color_image
height = color_image.shape[0]
width = color_image.shape[1]
frameBuffer.put(color_image.copy())
res = None
if not results.empty():
res = results.get(False)
detectframecount += 1
imdraw = overlay_on_image(frames, res, LABELS, camera_mode, background_transparent_mode,
background_img, depth_scale=depth_scale, align=align)
lastresults = res
else:
imdraw = overlay_on_image(frames, lastresults, LABELS, camera_mode, background_transparent_mode,
background_img, depth_scale=depth_scale, align=align)
cv2.imshow(window_name, cv2.resize(imdraw, (width, height)))
if cv2.waitKey(1)&0xFF == ord('q'):
# Stop streaming
if pipeline != None:
pipeline.stop()
sys.exit(0)
## Print FPS
framecount += 1
if framecount >= 15:
fps = "(Playback) {:.1f} FPS".format(time1/15)
detectfps = "(Detection) {:.1f} FPS".format(detectframecount/time2)
framecount = 0
detectframecount = 0
time1 = 0
time2 = 0
t2 = time.perf_counter()
elapsedTime = t2-t1
time1 += 1/elapsedTime
time2 += elapsedTime
def inferencer(results, frameBuffer, ssd_detection_mode, face_detection_mode, devnum, mp_active_stick_number, mp_stick_temperature):
graphs = []
graph_buffers = []
graphHandles = []
graphHandle0 = None
graphHandle1 = None
mvnc.global_set_option(mvnc.GlobalOption.RW_LOG_LEVEL, 4)
devices = mvnc.enumerate_devices()
if len(devices) == 0:
print("No NCS devices found")
sys.exit(1)
print(len(devices))
# 1:= Enabled MobileNet-SSD Model
if ssd_detection_mode == 1:
with open(join(graph_folder, "graph"), mode="rb") as f:
graph_buffers.append(f.read())
graphs.append(mvnc.Graph('MobileNet-SSD'))
# 1:= Enabled Fullweight FaceDetection Model
if face_detection_mode == 1:
with open(join(graph_folder, "graph.fullfacedetection"), mode="rb") as f:
graph_buffers.append(f.read())
graphs.append(mvnc.Graph('FullFaceDetection'))
# 2:= Enabled Lightweight FaceDetection Model
if face_detection_mode == 2:
with open(join(graph_folder, "graph.shortfacedetection"), mode="rb") as f:
graph_buffers.append(f.read())
graphs.append(mvnc.Graph('ShortFaceDetection'))
devopen = False
for device in devices:
try:
device = mvnc.Device(device)
device.open()
for (graph, graph_buffer) in zip(graphs, graph_buffers):
graphHandles.append(graph.allocate_with_fifos(device, graph_buffer))
devopen = True
break
except:
continue
if devopen == False:
print("NCS Devices open Error!!!")
sys.exit(1)
print("Loaded Graphs!!! ")
THERMAL_STATS = mvnc.DeviceOption.RO_THERMAL_STATS
temperature = device.get_option
while True:
# 0:= Inactive stick, 1:= Active stick
if mp_active_stick_number[devnum] == 0:
continue
# Measure the temperature inside the stick
mp_stick_temperature[devnum] = temperature(THERMAL_STATS)[0]
try:
if frameBuffer.empty():
continue
color_image = frameBuffer.get()
prepimg = preprocess_image(color_image)
res = None
for (graph, graphHandle) in zip(graphs, graphHandles):
graphHandle0 = graphHandle[0]
graphHandle1 = graphHandle[1]
graph.queue_inference_with_fifo_elem(graphHandle0, graphHandle1, prepimg.astype(np.float32), None)
out, _ = graphHandle1.read_elem()
num_valid_boxes = int(out[0])
if num_valid_boxes > 0:
if isinstance(res, type(None)):
res = [out]
else:
res = np.append(res, [out], axis=0)
results.put(res)
except:
import traceback
traceback.print_exc()
def preprocess_image(src):
try:
img = cv2.resize(src, (300, 300))
img = img - 127.5
img = img * 0.007843
return img
except:
import traceback
traceback.print_exc()
def overlay_on_image(frames, object_infos, LABELS, camera_mode, background_transparent_mode, background_img, depth_scale=1.0, align=None):
try:
# 0:=RealSense Mode, 1:=USB Camera Mode
if camera_mode == 0:
# 0:= No background transparent, 1:= Background transparent
if background_transparent_mode == 0:
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
elif background_transparent_mode == 1:
aligned_frames = align.process(frames)
depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
depth_dist = depth_frame.as_depth_frame()
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
elif camera_mode == 1:
color_image = frames
if isinstance(object_infos, type(None)):
# 0:= No background transparent, 1:= Background transparent
if background_transparent_mode == 0:
return color_image
elif background_transparent_mode == 1:
return background_img
# Show images
height = color_image.shape[0]
width = color_image.shape[1]
entire_pixel = height * width
occupancy_threshold = 0.9
if background_transparent_mode == 0:
img_cp = color_image.copy()
elif background_transparent_mode == 1:
img_cp = background_img.copy()
for (object_info, LABEL) in zip(object_infos, LABELS):
num_valid_boxes = int(object_info[0])
if num_valid_boxes > 0:
drawing_initial_flag = True
for box_index in range(num_valid_boxes):
base_index = 7 + box_index * 7
if (not np.isfinite(object_info[base_index]) or
not np.isfinite(object_info[base_index + 1]) or
not np.isfinite(object_info[base_index + 2]) or
not np.isfinite(object_info[base_index + 3]) or
not np.isfinite(object_info[base_index + 4]) or
not np.isfinite(object_info[base_index + 5]) or
not np.isfinite(object_info[base_index + 6])):
continue
x1 = max(0, int(object_info[base_index + 3] * height))
y1 = max(0, int(object_info[base_index + 4] * width))
x2 = min(height, int(object_info[base_index + 5] * height))
y2 = min(width, int(object_info[base_index + 6] * width))
object_info_overlay = object_info[base_index:base_index + 7]
# 0:= No background transparent, 1:= Background transparent
if background_transparent_mode == 0:
min_score_percent = 60
elif background_transparent_mode == 1:
min_score_percent = 20
source_image_width = width
source_image_height = height
base_index = 0
class_id = object_info_overlay[base_index + 1]
percentage = int(object_info_overlay[base_index + 2] * 100)
if (percentage <= min_score_percent):
continue
box_left = int(object_info_overlay[base_index + 3] * source_image_width)
box_top = int(object_info_overlay[base_index + 4] * source_image_height)
box_right = int(object_info_overlay[base_index + 5] * source_image_width)
box_bottom = int(object_info_overlay[base_index + 6] * source_image_height)
# 0:=RealSense Mode, 1:=USB Camera Mode
if camera_mode == 0:
meters = depth_dist.get_distance(box_left+int((box_right-box_left)/2), box_top+int((box_bottom-box_top)/2))
label_text = LABEL[int(class_id)] + " (" + str(percentage) + "%)"+ " {:.2f}".format(meters) + " meters away"
elif camera_mode == 1:
label_text = LABEL[int(class_id)] + " (" + str(percentage) + "%)"
# 0:= No background transparent, 1:= Background transparent
if background_transparent_mode == 0:
box_color = (255, 128, 0)
box_thickness = 1
cv2.rectangle(img_cp, (box_left, box_top), (box_right, box_bottom), box_color, box_thickness)
label_background_color = (125, 175, 75)
label_text_color = (255, 255, 255)
label_size = cv2.getTextSize(label_text, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)[0]
label_left = box_left
label_top = box_top - label_size[1]
if (label_top < 1):
label_top = 1
label_right = label_left + label_size[0]
label_bottom = label_top + label_size[1]
cv2.rectangle(img_cp, (label_left - 1, label_top - 1), (label_right + 1, label_bottom + 1), label_background_color, -1)
cv2.putText(img_cp, label_text, (label_left, label_bottom), cv2.FONT_HERSHEY_SIMPLEX, 0.5, label_text_color, 1)
elif background_transparent_mode == 1:
clipping_distance = (meters+0.05) / depth_scale
depth_image_3d = np.dstack((depth_image, depth_image, depth_image))
fore = np.where((depth_image_3d > clipping_distance) | (depth_image_3d <= 0), 0, color_image)
area = abs(box_bottom - box_top) * abs(box_right - box_left)
occupancy = area / entire_pixel
if occupancy <= occupancy_threshold:
if drawing_initial_flag == True:
img_cp = fore
drawing_initial_flag = False
else:
img_cp[box_top:box_bottom, box_left:box_right] = cv2.addWeighted(img_cp[box_top:box_bottom, box_left:box_right],
0.85,
fore[box_top:box_bottom, box_left:box_right],
0.85,
0)
cv2.putText(img_cp, fps, (width-170,15), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
cv2.putText(img_cp, detectfps, (width-170,30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
return img_cp
except:
import traceback
traceback.print_exc()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('-grp','--graph',dest='graph_folder',type=str,default='./',help='MVNC graphs Path. (Default=./)')
parser.add_argument('-mod','--mode',dest='camera_mode',type=int,default=0,help='Camera Mode. (0:=RealSense Mode, 1:=USB Camera Mode. Defalut=0)')
parser.add_argument('-wd','--width',dest='camera_width',type=int,default=320,help='Width of the frames in the video stream. (USB Camera Mode Only. Default=320)')
parser.add_argument('-ht','--height',dest='camera_height',type=int,default=240,help='Height of the frames in the video stream. (USB Camera Mode Only. Default=240)')
parser.add_argument('-tp','--transparent',dest='background_transparent_mode',type=int,default=0,help='TransparentMode. (RealSense Mode Only. 0:=No background transparent, 1:=Background transparent)')
parser.add_argument('-sd','--ssddetection',dest='ssd_detection_mode',type=int,default=1,help='SSDDetectionMode. (0:=Disabled, 1:=Enabled Default=1)')
parser.add_argument('-fd','--facedetection',dest='face_detection_mode',type=int,default=0,help='FaceDetectionMode. (0:=Disabled, 1:=Full, 2:=Short Default=0)')
parser.add_argument('-snc','--sticknumofcluster',dest='stick_num_of_cluster',type=int,default=0,help='Number of sticks to be clustered. (0:=Clustering invalid, n:=Number of sticks Default=0)')
parser.add_argument('-csc','--clusterswitchcycle',dest='cluster_switch_cycle',type=int,default=10000,help='Cycle of switching active cluster. (n:=millisecond Default=10000)')
parser.add_argument('-cst','--clusterswittemperature',dest='cluster_switch_temperature',type=float,default=65.0,help='Temperature threshold to switch active cluster. (n.n:=temperature(Celsius) Default=65.0)')
args = parser.parse_args()
graph_folder = args.graph_folder
camera_mode = args.camera_mode
camera_width = args.camera_width
camera_height = args.camera_height
background_transparent_mode = args.background_transparent_mode
ssd_detection_mode = args.ssd_detection_mode
face_detection_mode = args.face_detection_mode
stick_num_of_cluster = args.stick_num_of_cluster
cluster_switch_cycle = args.cluster_switch_cycle
cluster_switch_temperature = args.cluster_switch_temperature
# 0:=RealSense Mode, 1:=USB Camera Mode
if camera_mode != 0 and camera_mode != 1:
print("Camera Mode Error!! " + str(camera_mode))
sys.exit(0)
if camera_mode != 0 and background_transparent_mode == 1:
background_transparent_mode = 0
if background_transparent_mode == 1:
background_img = np.zeros((camera_height, camera_width, 3), dtype=np.uint8)
if face_detection_mode != 0:
ssd_detection_mode = 0
if ssd_detection_mode == 0 and face_detection_mode != 0:
del(LABELS[0])
devices = None
try:
mp.set_start_method('forkserver')
frameBuffer = mp.Queue(10)
results = mp.Queue()
# Start streaming
p = mp.Process(target=camThread,
args=(LABELS, results, frameBuffer, camera_mode, camera_width, camera_height, background_transparent_mode, background_img),
daemon=True)
p.start()
processes.append(p)
# Start detection MultiStick
devices = mvnc.enumerate_devices()
if len(devices) == 0:
print("No devices found")
sys.exit(0)
device_count = len(devices)
if stick_num_of_cluster > 0 and stick_num_of_cluster > (device_count // 2):
print("`stick_num_of_cluster` must be less than half of the total number of sticks.")
sys.exit(0)
# Initialization of clustering stick
mp_active_stick_number = mp.Array('i', device_count)
mp_stick_temperature = mp.Array('f', device_count)
# 0:= Clustering invalid, n:= Number of sticks to be clustered
if stick_num_of_cluster > 0:
# Activate only the sticks in the cluster
for devnum in range(stick_num_of_cluster):
# 0:= Inactive, 1:= Active
mp_active_stick_number[devnum] = 1
else:
# Activate all sticks
for devnum in range(device_count):
# 0:= Inactive, 1:= Active
mp_active_stick_number[devnum] = 1
# Activation of inferencer
for devnum in range(device_count):
p = mp.Process(target=inferencer,
args=(results, frameBuffer, ssd_detection_mode, face_detection_mode, devnum, mp_active_stick_number, mp_stick_temperature),
daemon=True)
p.start()
processes.append(p)
# Cluster switching determination
t1 = time.perf_counter() * 1000
while True:
# Switch cluster
if stick_num_of_cluster > 0:
# Measure inside temperature of stick
relative_pointer = active_stick_pointer
counta = 0
max_temperature = 0.0
while True:
temperature = mp_stick_temperature[relative_pointer]
if max_temperature < temperature:
max_temperature = temperature
relative_pointer += 1
counta += 1
if relative_pointer > (device_count - 1):
relative_pointer = 0
if counta >= stick_num_of_cluster:
break
# Cluster switching judgment
if (cluster_switch_cycle > 0 and elapsedtime >= cluster_switch_cycle) or max_temperature >= cluster_switch_temperature:
# Cluster inactivate
counta = 0
while True:
mp_active_stick_number[active_stick_pointer] = 0
active_stick_pointer += 1
counta += 1
if active_stick_pointer > (device_count - 1):
active_stick_pointer = 0
if counta >= stick_num_of_cluster:
break
# Cluster activate
relative_pointer = active_stick_pointer
counta = 0
while True:
mp_active_stick_number[relative_pointer] = 1
relative_pointer += 1
counta += 1
if relative_pointer > (device_count - 1):
relative_pointer = 0
if counta >= stick_num_of_cluster:
break
elapsedtime = 0.0
t1 = time.perf_counter() * 1000
t2 = time.perf_counter() * 1000
elapsedtime = (t2-t1)
print("Active Sticks =", mp_active_stick_number[:],
"elapsedtime(millisec) = {:.1f}".format(elapsedtime),
"max_temperature = {:.1f}".format(max_temperature))
else:
sleep(1)
except:
import traceback
traceback.print_exc()
finally:
for p in range(len(processes)):
processes[p].terminate()
print("\n\nFinished\n\n")
仕事では1mmもプログラムを書かないので、荒い部分があれば、ご指摘歓迎いたします。