はじめに
1.LifeCycleとは
1.1 LifeCycleによってノードの状態を制御できる
ROS1までの通常のノードに加えて、ROS2ではLifeCycle Node(もしくはManeged Nodes)という仕組みが導入されています。通常のノードは起動した直後から動作し始め、途中で再起動したり、動作を一時停止することはできません。一方LifeCycleNodeは下の画像のような4つの状態を持ちます。
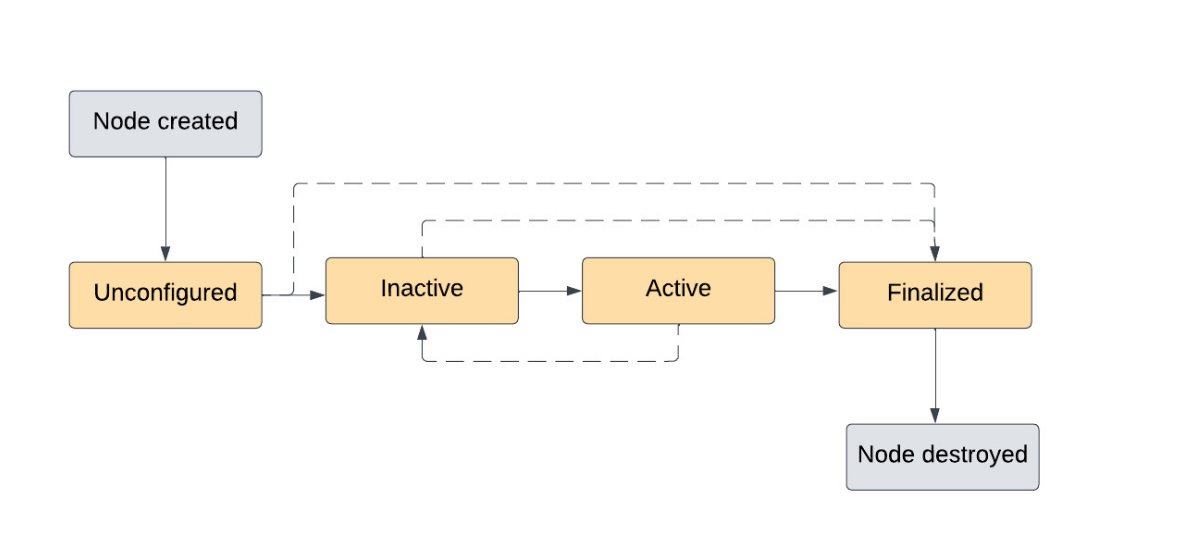
1引用
- Unconfigured
- Inactive
- Active
- Finalized:
状態遷移詳細。実はこの他に6つの中間状態を持ち、これらによって柔軟に状態遷移を制御することができる。
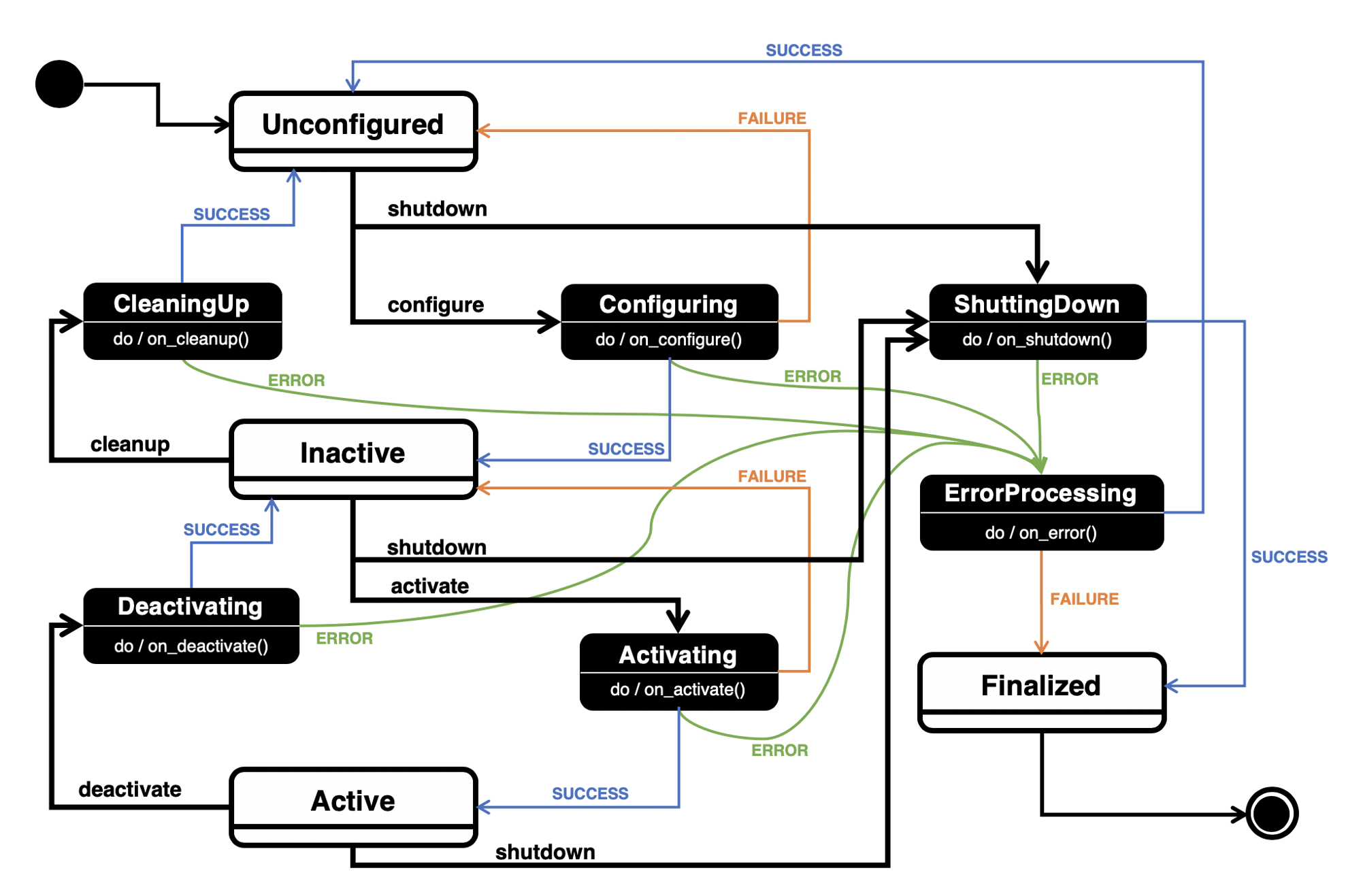
- Configuring: 構成中.ノードの初期化やメモリの確保などを行っている状態
- CleaningUp: 終了処理中
- ShuttingDown: 停止中
- Activating: 活動状態へ移行中。成功するとノードの状態はActiveとなり動作を開始する
- Deactivating: 未活動状態へ移行中。成功するとInactiveとなり動作停止
- ErrorProcessing: エラー処理中
更に詳細については[2],[3]がわかりやすいです。
1.2 使用例
-
ノード間に依存関係がある場合
ノードXが正しく動作するために,ノードYが起動して計算結果をパブリッシュしている必要があるとき、ノードYが動作しているのを確認してから、初めてノードXをactivateするという処理を簡単に作れる。これによってエラーや誤動作をしない仕組みが作れる。 -
リアルタイムでモードを切り替えたりしたい時にも有効
ノードA,ノードBによる処理によって二つのモードがあるとき,activate, deactivateを使うことでうまくモードを切り替えることができる.自立走行ロボットを用いて,以下のようなシナリオを想定してみましょう.
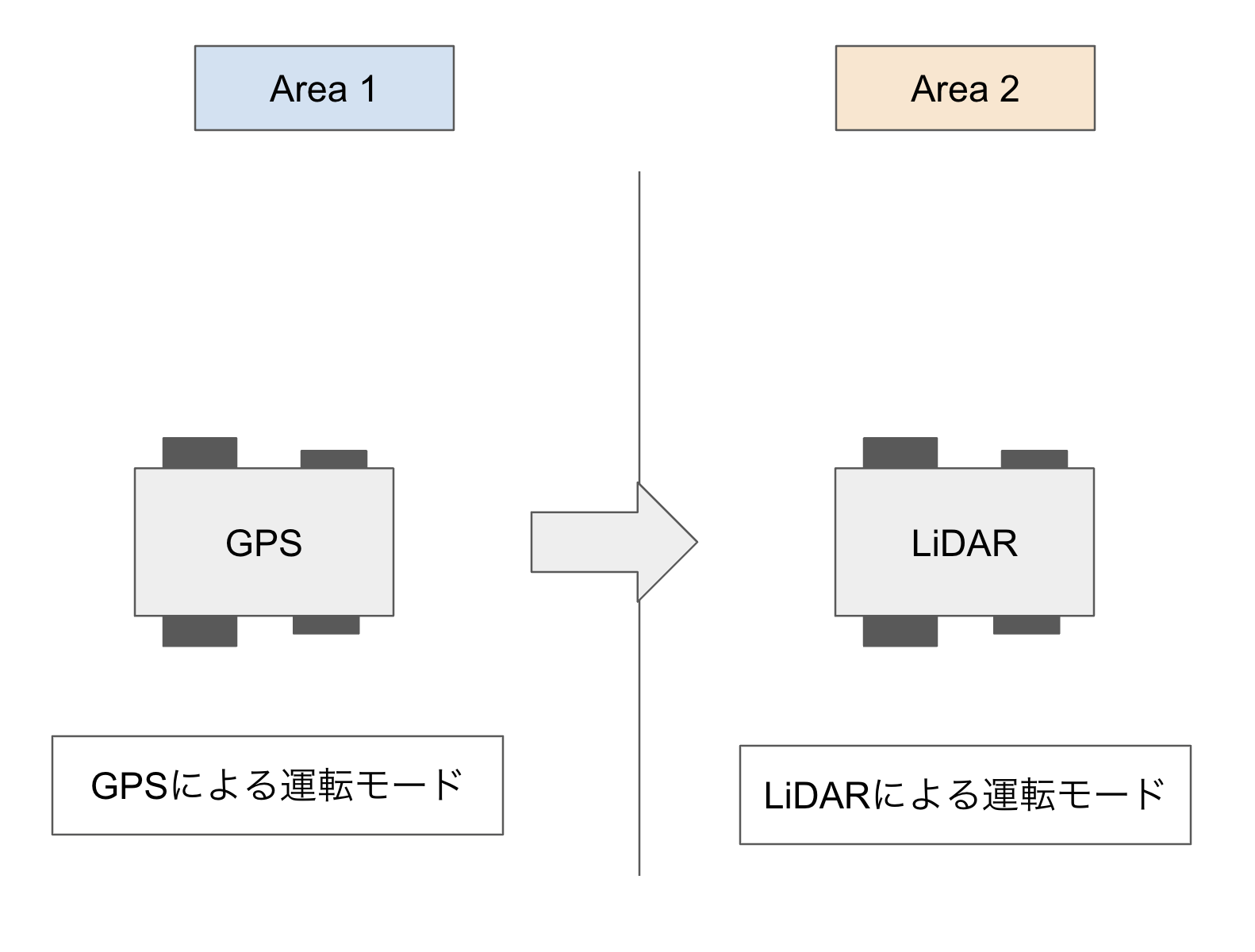
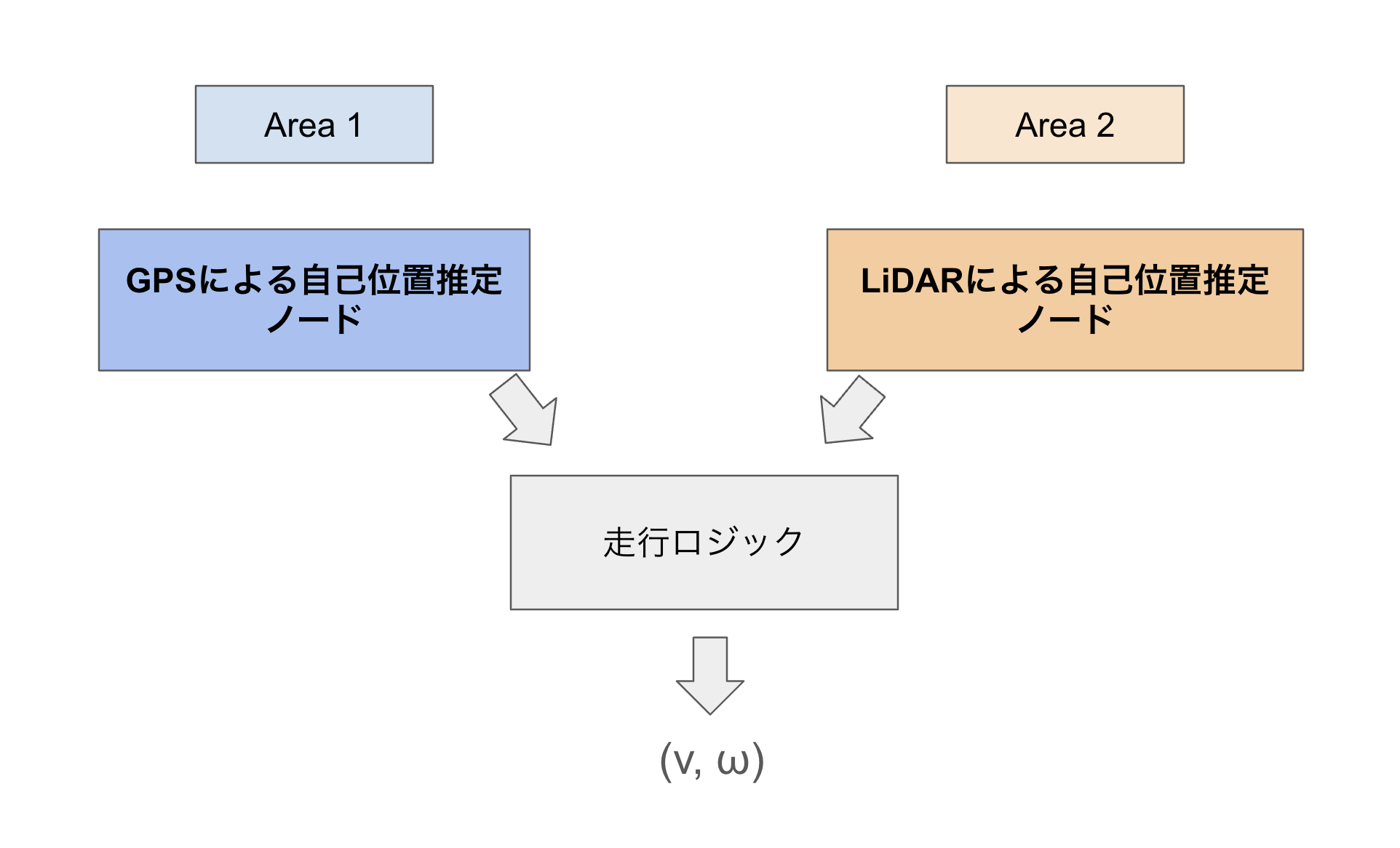
エリア1ではGPSを使った運転モードで,エリア2ではLiDARを使った運転モードで走行したいとします.走行のアルゴリズムは適当なものを仮定すると,外界認識-自己位置推定を行う別々のノードを用意しておいて,切り替え時にactivate, deactivateを行うことで切り替えることができます.
2.チュートリアル
今回は2つ目の例を用いた実装を行っていきます.先ほどのシナリオを簡略化し,擬似的に再現してみましょう.
以下の画像のようなものを実装してみます.
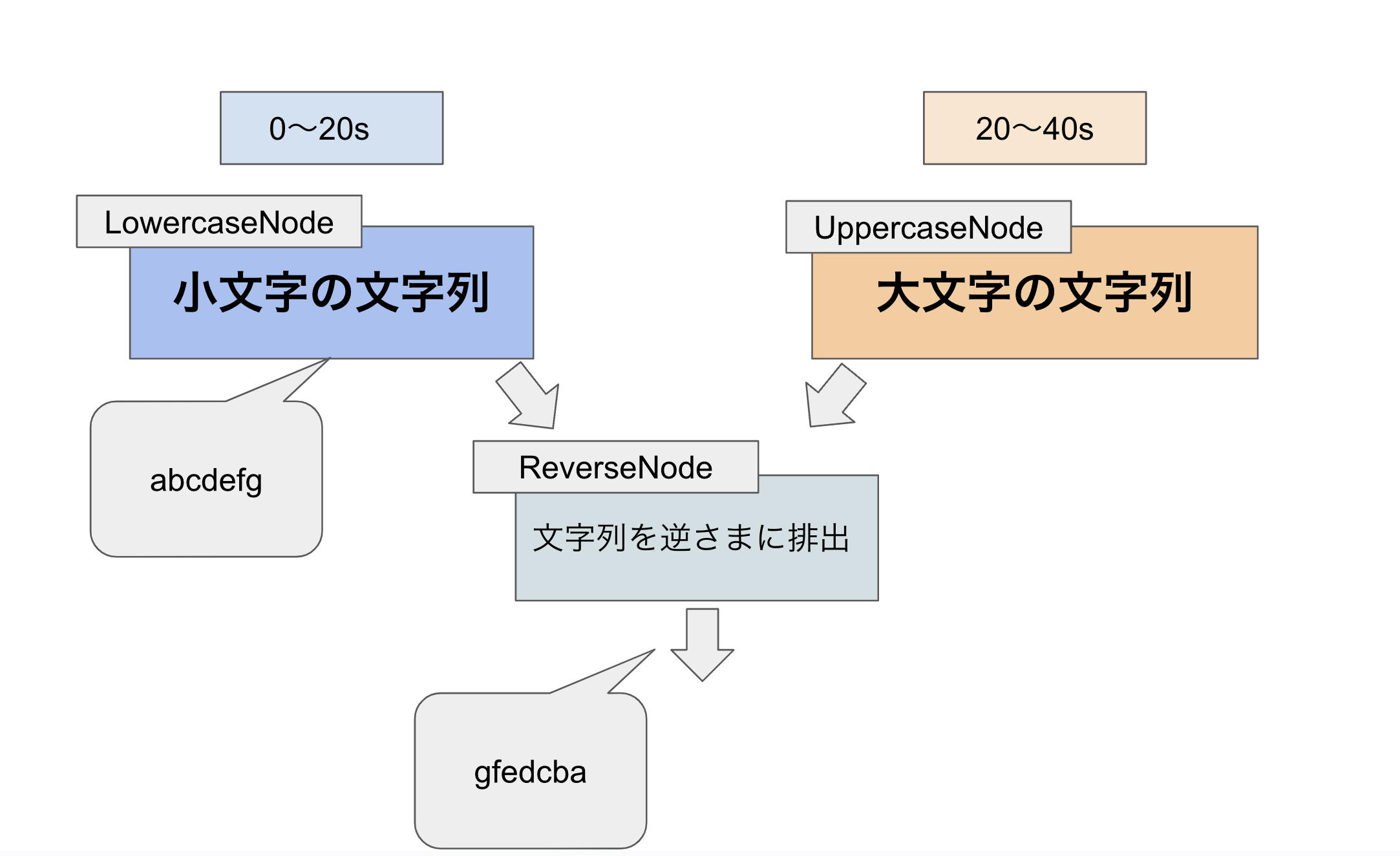
- 始まって20秒間,LowercaseNodeはabcdefg(小文字)をパブリッシュする
- 20秒後,UppercaseNodeはABCDEFG(大文字)をパブリッシュする
- ReverseNodeはサブスクライブした文字列を逆さまにパブリッシュする
- 40秒経つと終了する
実装方法
実装コードはこちらにあります.
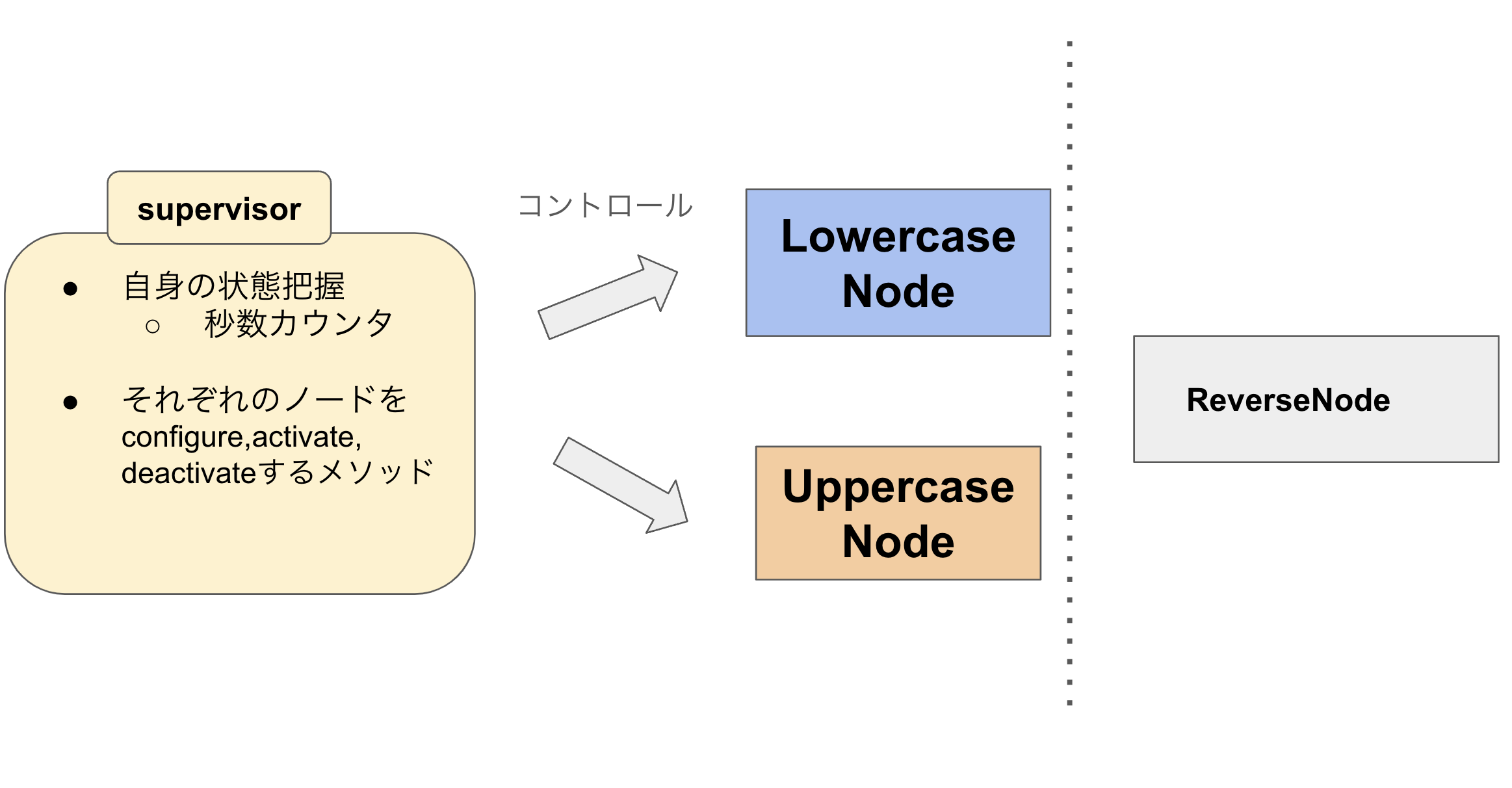
今回は自立ロボットを想定しています.ロボットが自分でエリアAからBへ移ったことを認識して,自身でモードを切り替えてくれると嬉しいです.今まで出てきた3つのノードに加えて,状態を監視し,lifecycle nodeの管理を行うsupervisorというノードを用意します.
このノードが,自身の状態変数としてタイマーを使い.ノードが立ち上がってからの秒数に応じてノードを管理します.
lowercase_node
#include <chrono>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_lifecycle/lifecycle_node.hpp"
#include "rclcpp_lifecycle/lifecycle_publisher.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
using rclcpp_lifecycle::LifecycleNode;
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn;
class LowercaseNode : public LifecycleNode
{
public:
explicit LowercaseNode(const rclcpp::NodeOptions & options = rclcpp::NodeOptions())
: LifecycleNode("lowercase_node", options)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode constructor");
}
protected:
CallbackReturn on_configure(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode: on_configure()");
publisher_ = this->create_publisher<std_msgs::msg::String>("string_topic", 10);
return CallbackReturn::SUCCESS;
}
CallbackReturn on_activate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode: on_activate()");
if (publisher_) {
publisher_->on_activate();
}
timer_ = this->create_wall_timer(1s, [this]() {
auto msg = std::make_shared<std_msgs::msg::String>();
msg->data = "abcdefg";
publisher_->publish(*msg);
RCLCPP_INFO(this->get_logger(), "[LowercaseNode] Publishing: %s", msg->data.c_str());
});
return CallbackReturn::SUCCESS;
}
CallbackReturn on_deactivate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode: on_deactivate()");
if (timer_) {
timer_->cancel();
timer_.reset();
}
if (publisher_) {
publisher_->on_deactivate();
}
return CallbackReturn::SUCCESS;
}
CallbackReturn on_cleanup(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode: on_cleanup()");
publisher_.reset();
return CallbackReturn::SUCCESS;
}
CallbackReturn on_shutdown(const rclcpp_lifecycle::State & state)
{
RCLCPP_INFO(this->get_logger(), "LowercaseNode: on_shutdown() from [%s]", state.label().c_str());
return CallbackReturn::SUCCESS;
}
private:
rclcpp_lifecycle::LifecyclePublisher<std_msgs::msg::String>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<LowercaseNode>();
rclcpp::executors::SingleThreadedExecutor exe;
exe.add_node(node->get_node_base_interface());
exe.spin();
rclcpp::shutdown();
return 0;
}
uppercase_node
#include <chrono>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_lifecycle/lifecycle_node.hpp"
#include "rclcpp_lifecycle/lifecycle_publisher.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
using rclcpp_lifecycle::LifecycleNode;
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn;
class UppercaseNode : public LifecycleNode
{
public:
explicit UppercaseNode(const rclcpp::NodeOptions & options = rclcpp::NodeOptions())
: LifecycleNode("uppercase_node", options)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode constructor");
}
protected:
CallbackReturn on_configure(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode: on_configure()");
publisher_ = this->create_publisher<std_msgs::msg::String>("string_topic", 10);
return CallbackReturn::SUCCESS;
}
CallbackReturn on_activate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode: on_activate()");
if (publisher_) {
publisher_->on_activate();
}
timer_ = this->create_wall_timer(1s, [this]() {
auto msg = std::make_shared<std_msgs::msg::String>();
msg->data = "ABCDEFG";
publisher_->publish(*msg);
RCLCPP_INFO(this->get_logger(), "[UppercaseNode] Publishing: %s", msg->data.c_str());
});
return CallbackReturn::SUCCESS;
}
CallbackReturn on_deactivate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode: on_deactivate()");
if (timer_) {
timer_->cancel();
timer_.reset();
}
if (publisher_) {
publisher_->on_deactivate();
}
return CallbackReturn::SUCCESS;
}
CallbackReturn on_cleanup(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode: on_cleanup()");
publisher_.reset();
return CallbackReturn::SUCCESS;
}
CallbackReturn on_shutdown(const rclcpp_lifecycle::State & state)
{
RCLCPP_INFO(this->get_logger(), "UppercaseNode: on_shutdown() from [%s]", state.label().c_str());
return CallbackReturn::SUCCESS;
}
private:
rclcpp_lifecycle::LifecyclePublisher<std_msgs::msg::String>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<UppercaseNode>();
rclcpp::executors::SingleThreadedExecutor exe;
exe.add_node(node->get_node_base_interface());
exe.spin();
rclcpp::shutdown();
return 0;
}
reverse_node
#include <chrono>
#include <memory>
#include <string>
#include <algorithm>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
class SakasamaNode : public rclcpp::Node
{
public:
explicit SakasamaNode(const rclcpp::NodeOptions & options = rclcpp::NodeOptions())
: Node("reverse_node", options)
{
RCLCPP_INFO(this->get_logger(), "SakasamaNode constructor");
// サブスクライブ: string_topic
subscription_ = this->create_subscription<std_msgs::msg::String>(
"string_topic", 10,
std::bind(&SakasamaNode::callbackString, this, std::placeholders::_1));
// パブリッシャ: sakasama_topic
publisher_ = this->create_publisher<std_msgs::msg::String>("sakasama_topic", 10);
}
private:
void callbackString(const std_msgs::msg::String::SharedPtr msg)
{
auto reversed_str = msg->data;
std::reverse(reversed_str.begin(), reversed_str.end());
std_msgs::msg::String out_msg;
out_msg.data = reversed_str;
// 受け取ったら即パブリッシュ
publisher_->publish(out_msg);
RCLCPP_INFO(this->get_logger(), "[ReverseNode] Reversed Letters: %s", out_msg.data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<SakasamaNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
supervisor
// supervisor_node.cpp
#include <chrono>
#include <memory>
#include <string>
#include <unordered_map>
#include <vector>
#include "rclcpp/rclcpp.hpp"
#include "lifecycle_msgs/srv/change_state.hpp"
#include "lifecycle_msgs/msg/transition.hpp"
using namespace std::chrono_literals;
class Supervisor : public rclcpp::Node
{
public:
Supervisor()
: Node("supervisor")
{
RCLCPP_INFO(this->get_logger(), "Supervisor constructor");
// ライフサイクル制御対象ノード (SakasamaNodeは除く)
target_nodes_ = {
"lowercase_node",
"uppercase_node"
};
// /ノード名/change_state クライアントを作成
for (auto & node_name : target_nodes_) {
auto client = this->create_client<lifecycle_msgs::srv::ChangeState>(
node_name + "/change_state"
);
clients_[node_name] = client;
}
start_time_ = now().seconds();
// 1秒おきに状態を管理
timer_ = this->create_wall_timer(1s, std::bind(&Supervisor::timerCallback, this));
}
private:
void timerCallback()
{
double elapsed = now().seconds() - start_time_;
// 0秒でLowercaseNodeをActivate
if (!hiragana_activated_ && elapsed >= 0.0) {
RCLCPP_INFO(this->get_logger(), "Activating LowercaseNode...");
configure_and_activate("lowercase_node");
hiragana_activated_ = true;
}
// 20秒でLowercaseNodeをDeactivate → UppercaseNodeをActivate
if (!katakana_activated_ && elapsed >= 20.0) {
RCLCPP_INFO(this->get_logger(), "Switching to UppercaseNode...");
deactivate("lowercase_node");
configure_and_activate("uppercase_node");
katakana_activated_ = true;
}
// 40秒で全LifecycleノードをShutdown
if (!done_ && elapsed >= 40.0) {
RCLCPP_INFO(this->get_logger(), "Shutting down all lifecycle nodes...");
shutdown_lifecycle_node("lowercase_node");
shutdown_lifecycle_node("uppercase_node");
done_ = true;
// Supervisor自体も終了
rclcpp::shutdown();
}
}
// Configure → Activate
void configure_and_activate(const std::string & node_name)
{
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_CONFIGURE);
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_ACTIVATE);
}
// Deactivate
void deactivate(const std::string & node_name)
{
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_DEACTIVATE);
}
// Deactivate → Cleanup → Shutdown
void shutdown_lifecycle_node(const std::string & node_name)
{
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_DEACTIVATE);
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_CLEANUP);
change_state(node_name, lifecycle_msgs::msg::Transition::TRANSITION_UNCONFIGURED_SHUTDOWN);
}
/**
* ライフサイクルノードの /change_state サービスを呼んで状態を変更
*/
bool change_state(const std::string & node_name, uint8_t transition_id)
{
auto it = clients_.find(node_name);
if (it == clients_.end()) {
RCLCPP_ERROR(this->get_logger(), "No client for node: %s", node_name.c_str());
return false;
}
auto client = it->second;
// サービスが起動するまで待機 (これはOK。spin不要)
if (!client->wait_for_service(std::chrono::seconds(2))) {
RCLCPP_ERROR(this->get_logger(), "Service not available for node: %s", node_name.c_str());
return false;
}
// リクエスト作成
auto request = std::make_shared<lifecycle_msgs::srv::ChangeState::Request>();
request->transition.id = transition_id;
// 非同期でサービス呼び出し
auto future = client->async_send_request(
request,
[this, node_name](rclcpp::Client<lifecycle_msgs::srv::ChangeState>::SharedFuture response) {
// ここは別スレッドで呼ばれるコールバック
if (!response.get()->success) {
RCLCPP_ERROR(this->get_logger(),
"Failed to change state for node: %s", node_name.c_str());
} else {
RCLCPP_INFO(this->get_logger(),
"Succeeded to change state for node: %s", node_name.c_str());
}
}
);
// ここでは同期待ちせず、即returnする
// 成否はコールバック内でログを出すだけにする
return true;
}
std::vector<std::string> target_nodes_;
std::unordered_map<std::string, rclcpp::Client<lifecycle_msgs::srv::ChangeState>::SharedPtr> clients_;
rclcpp::TimerBase::SharedPtr timer_;
double start_time_;
bool hiragana_activated_{false};
bool katakana_activated_{false};
bool done_{false};
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto supervisor = std::make_shared<Supervisor>();
rclcpp::spin(supervisor);
rclcpp::shutdown();
return 0;
}
デモ
launchファイルで起動します
ros2 launch my_lifecycle_tutorial lifecycle_tutorial.py
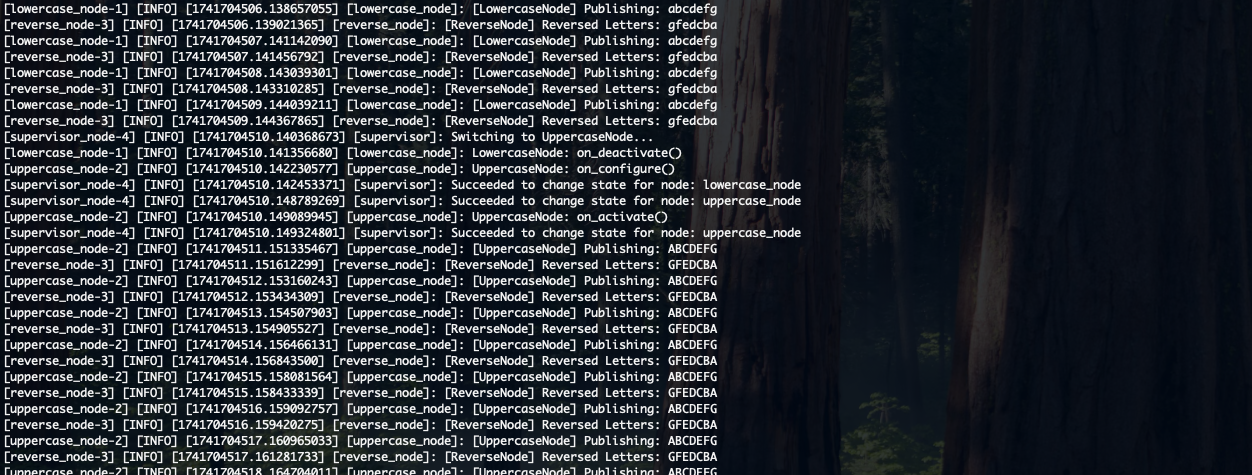
動画
中盤のこの部分で小文字→大文字になっているのが確認できました!
参考
- ROS2 Launchでライフサイクル制御
- Managed nodes
- ROS 2ノードのライフサイクルを理解する (1) | Yutaka Kondo
- ROS 2ノードのライフサイクルを理解する (2) | Yutaka Kondo
謝辞
この取り組みは, GxP(グロースエクスパートナーズ)株式会社様のサポートを受けて実施しています. 貴重なアドバイスや, ロボットに必要な機材の支援をいただきました. 心より感謝申し上げます.
Arcanain