今回は、巷でコンパクトで使いやすいと有名なM5StickCを利用して、追跡カメラを制御してみた。
M5StickCの仕様は以下のとおりです
最初の絵のようにいろいろつかえそうです。
ベースは、ESP32 PICO-4Mということで、今まで扱ってきたマイコンの線上にあるものだと分かります.
・ArduinoIDEやMicroPythonで開発出来る
・80mAhバッテリーも内蔵
・Wifi対応
・赤外線
・MIC
・6軸IMUセンサー
・LCD
などなど

以下が、裏面拡大図です.

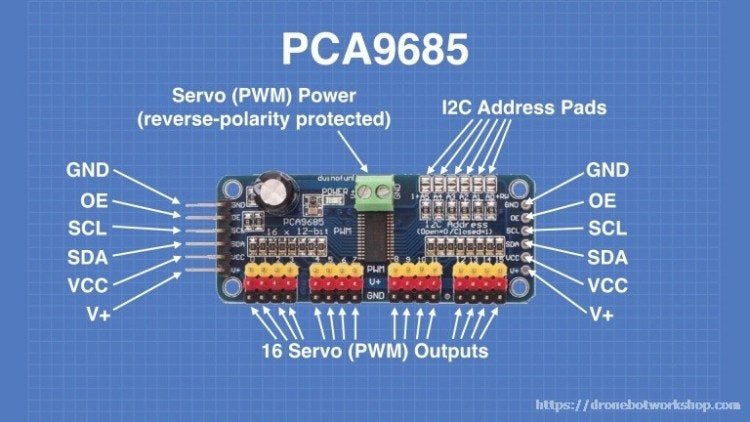
今回は、内蔵IMUセンサーと2個のServoを独立に制御するために、PCA9685をI2Cで利用するために、SLC(G26Pin), SDA(G0Pin)及びGROVEのGNDとVoutを利用しました。
・接続
・(SDA, SCL)=(G0,G26)または(G32, G33)
・Wire.begin(0,26) またはWire.begin(32,33); の宣言が必要
| M5StickC | mpu6886(内蔵) | PCA9685 | Servo | comment |
|---|---|---|---|---|
| GND | GND | |||
| 3.3V | VCC | PCA9685led点灯 | ||
| SCL(G26) | SCL(内部) | SCL | GROVEG33も可 | |
| SDA(G0) | SDA(内部) | SDA | GROVEG32も可 | |
| 0_(yellow) | Servo1(yellow) | |||
| 0_(Black) | Servo1(Black) | |||
| 0_(red) | Servo1(red) | |||
| ... | ... | 16台制御可 | ||
| 15_(yellow) | Servo2(yellow) | |||
| 15_(Black) | Servo2(Black) | |||
| 15_(red) | Servo2(red) | |||
| PILO(4.2v)+ | + | ServoPower+ | ||
| PILO(4.2v)- | - | ServoPower- |
・Servoを動かす
・IO26利用
IO26のPWM信号を分けて二つのサーボに入力すれば二個動く。
M5StickCとサーボでつくる、API連動のかっこいいアナログメーター
結線
| M5StickC | Servo | comment |
|---|---|---|
| GND | GND | GND共通 |
| IO26 | yellow | |
| PILO(4.2v)+ | + | 外部電源 |
| PILO(4.2v)- | - | 外部電源 |
m5stickcでservo制御のためのコード
# include <Servo.h>
# include <M5StickC.h>
static const int servoPin1 = 26;
Servo servo1;
/*
Geekservo(灰色)のパルス間隔範囲は500〜2500。
最大パルスの位置を0にあわせ、最小パルスの数値を調整してメーターの最大値に合わせる。
https://akizukidenshi.com/download/ds/towerpro/SG90_a.pdf
*/
const int channel = -1;
const int minAngle = -90; // 最小アングル(ステップ)
const int maxAngle = 90; // 最大アングル(ステップ)
const int minPalseWidth = 500; // 最小パルス間隔(メーターの最大位置:この値を調節する)
const int maxPalseWidth = 2400; // 最小パルス間隔(メーターの最小位置)
void setup() {
servo1.attach(servoPin1,channel,minAngle,maxAngle,minPalseWidth,maxPalseWidth);
M5.begin();
M5.Lcd.setRotation(3);
M5.Lcd.setTextSize(4);
M5.Lcd.setCursor(0, 0, 2);
M5.Lcd.println("Ready");
}
void loop() {
for(int posDegrees = -90; posDegrees <= 90; posDegrees++) {
servo1.write(posDegrees);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0, 2);
M5.Lcd.println(posDegrees);
delay(100);
}
delay(1000);
for(int posDegrees = 90; posDegrees >= -90; posDegrees--) {
servo1.write(posDegrees);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0, 2);
M5.Lcd.println(posDegrees);
delay(100);
}
}
PWM(LED Control)@M5StickC非公式日本語リファレンス
ESP32のPWM出力は255が最大じゃなかった
Arduino – ESP32 の PWM ( LEDC )で 40MHzまでの安定した高周波パルスを思い通りに出せたぞ
結線
| M5StickC | PILO(4.2v) | Servo | comment |
|---|---|---|---|
| GND | GND | GND | GND共通 |
| IO26 | servo0;yellow | PWM信号線 | |
| + | servo0;red+ | 外部電源+ | |
| GND | - | servo0;black- | 外部電源− |
※注意;m5stickcの電源出力でサーボ二個接続だと内部回路が壊れました
上記参考より引用(ただし、Servo駆動に応用出来るという記載はありません)
「3.3V出力をON/OFFすることで擬似的に出力を制御するPWMを利用することができます。」
| PIN | IO26 | IO36 | IO0 | IO32 | IO33 |
|---|---|---|---|---|---|
| ledcWrite() | ○ | NG | ○ | ○ | ○ |
PWM(LED Control)でservo制御のためのコード
# include <M5StickC.h>
int PIN = 26;
int PWMCH = 0;
void setup() {
M5.begin();
pinMode(PIN, OUTPUT);
ledcSetup(PWMCH, 50, 12); //12bit 4096
ledcAttachPin(PIN, PWMCH);
}
void loop() {
ledcWrite(PWMCH, 103); // 0.5msec(-90) for sg90
delay(500);
ledcWrite(PWMCH, 246); // 1.2msec(0) for sg90
delay(500);
ledcWrite(PWMCH, 491); // 2.4msec(90) for sg90
delay(500);
}
| M5StickC | PILO(4.2v) | Servo | comment |
|---|---|---|---|
| GND | GND | GND | GND共通 |
| IO26 | servo0;yellow | PWM信号線 | |
| IO0 | servo1;yellow | PWM信号線 | |
| + | servo0;red+ | 外部電源+ | |
| + | servo1;red+ | 外部電源+ | |
| GND | - | servo0;black- | 外部電源− |
| GND | - | servo1;black- | 外部電源− |
PWM(LED Control)で複数servo制御のためのコード
# include <M5StickC.h>
int PIN0 = 26;
int PIN1 = 0;
int PWMCH = 0;
int PWMCH1 = 1;
void setup() {
M5.begin();
pinMode(PIN0, OUTPUT);
pinMode(PIN1, OUTPUT);
ledcSetup(PWMCH, 50, 12); //8bit
ledcAttachPin(PIN0, PWMCH);
ledcSetup(PWMCH1, 50, 12); //8bit
ledcAttachPin(PIN1, PWMCH1);
}
void loop() {
ledcWrite(PWMCH, 103); // 0.5msec(-90)
ledcWrite(PWMCH1, 103); // 0.5msec(-90)
delay(1000);
ledcWrite(PWMCH, 123); // 246 = 1.2msec(0)
ledcWrite(PWMCH1, 123); // 0.5msec(-90)
delay(1000);
ledcWrite(PWMCH, 246); // 491 = 2.4msec(90)
ledcWrite(PWMCH1, 246); // 0.5msec(-90)
delay(1000);
}
結線
| M5StickC | PILO(4.2v) | PCA9685 | Servo | comment |
|---|---|---|---|---|
| GROVE GND | GND | |||
| GROVE 3.3V | VCC | PCA9685led点灯 | ||
| SCL(G26orG33) | SCL | GROVE G33も可 | ||
| SDA(G0orG32) | SDA | GROVE G32も可 | ||
| 0_(yellow) | Servo1(yellow) | |||
| 0_(Black) | Servo1(Black) | |||
| 0_(red) | Servo1(red) | |||
| ... | ... | 合計16台制御可 | ||
| 15_(yellow) | Servo2(yellow) | |||
| 15_(Black) | Servo2(Black) | |||
| 15_(red) | Servo2(red) | |||
| + | + | PCA外部電源+入力 | ||
| − | - | PCA外部電源-入力 |
PCA9685のパッケージはいろいろあるが、最終的にAdafruit_PWMServoDriverが動いた.
Adafruit-PWM-Servo-Driver-Library
install;ライブラリーマネジャーで検索してインストールが簡単
i2c通信の(SDA, SCL)の組み合わせについて、Wire.begin(0,26); がとても重要で、(32.33)を指定すれば、こちらも使えるようになった。
PCA9685は、外部電源をつなげるタイプであり、今回はPILO(4.2V)を利用した。servoのコネクトもまんま3本させるので安定して使える。
PCA9685複数servo制御のためのコード
# include <M5StickC.h>
# include <Wire.h>
# include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
# define SERVOMIN 102
// 下で設定するPWM設定周波数を4096で分割したタイミングで制御する最小パルス幅 :4096/20×0.5=102.4 (0.5ms:SG90、0°の時のパルス幅)
# define SERVOMAX 492
// 下で設定するPWM設定周波数を4096で分割したタイミングで制御する最大パルス幅 :4096/20×2.4=491.5 (2.4ms:SG90、180°の時のパルス幅)
int sk =0;
void setup() {
Wire.begin(0,26); //i2cのpin宣言が重要
pwm.begin();
pwm.setPWMFreq(50); // SG90は 50 Hz で動く(PWM周波数設定)
M5.begin();
M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(40, 0, 2);
M5.Lcd.println("pca9685 TEST");
}
void loop() {
servo_write(0, 1*sk%70+80);
servo_write(15, 1*sk%70+80);
delay(50);
sk += 1;
M5.Lcd.setCursor(0, 15);
M5.Lcd.printf("output start");
M5.Lcd.printf("\n");
M5.Lcd.printf("1*sk");
M5.Lcd.printf("\n");
}
void servo_write(int ch, int ang){ //動かすサーボチャンネルと角度を指定
ang = map(ang, 0, 180, SERVOMIN, SERVOMAX); //角度(0~180)をPWMのパルス幅(150~500)に変換
pwm.setPWM(ch, 0, ang);
}
MPU6886で加速度・角速度計測のコード
# include <M5StickC.h>
# include <MadgwickAHRS.h> // 角度と角速度にMadgwickフィルタをかけるライブラリ
Madgwick MadgwickFilter; // Madgwickフィルタのオブジェクトを設定
float roll, pitch, yaw;
float preTime;
float accX = 0, accY = 0, accZ = 0;
float accX0 = 0, accY0 = 0, accZ0 = 0;
float gyroX = 0, gyroY = 0, gyroZ = 0;
float yaw_ =0;
void setup() {
M5.begin();
M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(40, 0, 2);
M5.Lcd.println("MPU6886 TEST");
M5.MPU6886.Init();
MadgwickFilter.begin(100); // Madgwickフィルタの周波数を100Hzに設定。
preTime = micros(); // 時間を記録
}
void loop() {
M5.MPU6886.getGyroData(&gyroX,&gyroY,&gyroZ);
M5.MPU6886.getAccelData(&accX,&accY,&accZ);
// Madgwickフィルターを用いて、PRY(pitch, roll, yaw)を計算
MadgwickFilter.updateIMU(gyroX, gyroY, gyroZ, accX, accY, accZ);
float pitch_ = MadgwickFilter.getPitch();
float roll_ = MadgwickFilter.getRoll();
//float dt = (micros()-preTime)/1000000. ;
Serial.print((micros()-preTime)/1000);
Serial.print("\n");
preTime = micros();
//yaw_ += gyroZ*dt;
yaw_ = MadgwickFilter.getYaw();
M5.Lcd.setCursor(0, 15);
M5.Lcd.printf("measurement start");
M5.Lcd.printf("\n");
M5.Lcd.printf("pitch,roll,yaw");
M5.Lcd.printf("\n");
M5.MPU6886.getAhrsData(&pitch, &roll, &yaw);
Serial.printf("%5.1f,%5.1f,%5.1f\n",pitch,roll,yaw);
M5.Lcd.printf("%5.1f,%5.1f,%5.1f\n",pitch,roll,yaw);
Serial.printf("%5.1f,%5.1f,%5.1f\n",pitch_,roll_,yaw_);
M5.Lcd.printf("%5.1f,%5.1f,%5.1f\n",pitch_,roll_,yaw_);
delay(0);
Serial.print("\n");
}
M5StickCの6軸IMU MPU6886を調べる
M5StickCのIMU(AHRS)研究 その2 パラメータ調整
接続は、冒頭に記載したとおり。
追跡カメラのコード
# include <M5StickC.h>
# include <Wire.h>
# include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
# include <M5StickC.h>
# include <MadgwickAHRS.h> // 角度と角速度にMadgwickフィルタをかけるライブラリ
Madgwick MadgwickFilter; // Madgwickフィルタのオブジェクトを設定
# define SERVOMIN 102
// 下で設定するPWM設定周波数を4096で分割したタイミングで制御する最小パルス幅 :4096/20×0.5=102.4 (0.5ms:SG90、0°の時のパルス幅)
# define SERVOMAX 492
// 下で設定するPWM設定周波数を4096で分割したタイミングで制御する最大パルス幅 :4096/20×2.4=491.5 (2.4ms:SG90、180°の時のパルス幅)
int sk =0;
float roll, pitch, yaw;
float preTime;
float accX = 0, accY = 0, accZ = 0;
float accX0 = 0, accY0 = 0, accZ0 = 0;
float gyroX = 0, gyroY = 0, gyroZ = 0;
float gyroX0 = 0, gyroY0 = 0, gyroZ0 = 0;
float gyro_x0 = 0, gyro_y0 = 0, gyro_z0 = 0;
float yaw_ =0;
void setup() {
Wire.begin(32,33);
pwm.begin();
pwm.setPWMFreq(50); // SG90は 50 Hz で動く(PWM周波数設定)
M5.begin();
M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(40, 0, 2);
M5.Lcd.println("pca9685-MPU6886 TEST");
M5.begin();
M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(40, 0, 2);
M5.MPU6886.Init();
MadgwickFilter.begin(100); // Madgwickフィルタの周波数を100Hzに設定。
int count = 1000; //ドリフト抑えるために初期値測定
for (int i = 0; i < count; i++) {
M5.MPU6886.getGyroData(&gyroX,&gyroY,&gyroZ);
gyro_x0 += gyroX;
gyro_y0 += gyroY;
gyro_z0 += gyroZ;
}
//係数はyaw_のドリフト最小で設定
gyroX0, gyroY0, gyroZ0 = -.87*gyro_x0/count, -.87*gyro_y0/count, .8*gyro_z0/count;
M5.MPU6886.getAccelData(&accX0,&accY0,&accZ0);
preTime = micros(); // 時間を記録
}
void loop() {
M5.MPU6886.getGyroData(&gyroX,&gyroY,&gyroZ);
M5.MPU6886.getAccelData(&accX,&accY,&accZ);
// Madgwickフィルターを用いて、PRY(pitch, roll, yaw)を計算
MadgwickFilter.updateIMU(gyroX-gyroX0, gyroY-gyroY0, gyroZ-gyroZ0, accX-accX0, accY-accY0, accZ-accZ0+1);
//MadgwickFilter.updateIMU(gyroX, gyroY, gyroZ, accX, accY, accZ);
float pitch_ = MadgwickFilter.getPitch();
float roll_ = MadgwickFilter.getRoll();
float dt = (micros()-preTime)/1000000. ;
//Serial.print((micros()-preTime)/1000);
//Serial.print("\n");
preTime = micros();
//yaw_ += gyroZ*dt; //MadgwickFilter.getYaw();
yaw_ = MadgwickFilter.getYaw();
M5.Lcd.setCursor(0, 15);
M5.Lcd.printf("measurement start");
M5.Lcd.printf("\n");
M5.Lcd.printf("pitch,roll,yaw");
M5.Lcd.printf("\n");
M5.MPU6886.getAhrsData(&pitch, &roll, &yaw);
//Serial.printf("%5.1f,%5.1f,%5.1f\n",pitch,roll,yaw-180);
M5.Lcd.printf("%5.1f,%5.1f,%5.1f\n",pitch,roll,yaw-180);
Serial.printf("%5.1f,%5.1f,%5.1f\n",pitch_,roll_,yaw_-180);
M5.Lcd.printf("%5.1f,%5.1f,%5.1f\n",pitch_,roll_,yaw_-180);
delay(0);
Serial.print("\n");
//servo_write(0, pitch+90); //pitchはドリフト小なのでyaw使えないとき
servo_write(0, yaw_-180+90);
servo_write(15, roll+90);
sk += 1;
}
void servo_write(int ch, int ang){ //動かすサーボチャンネルと角度を指定
ang = map(ang, 0, 180, SERVOMIN, SERVOMAX); //角度(0~180)をPWMのパルス幅(150~500)に変換
pwm.setPWM(ch, 0, ang);
}
・もう少しドリフトを抑える工夫をしよう
・異なるおもちゃを作ろう