どうでもいい話
いつも以上に備忘録なんですが、入れ直すたびにどれ入れたっけ?となるので、覚え書きしておこうと思います。
なんでXavierかって話ですが、持っているからというシンプルな理由です。
ThorやOrinに変えればいいのですが、やっぱり高いです。JetsonとGPGPUの新モデルごとの値上がりが・・・。
とはいえRaspberryPI5とかにはなかなか行けないわけです。
3D点群処理をしたりすると、CUDAにオフロードしないととてもじゃないですが回りきらない気がします。nVIDIAさまに負けた気がしますが。
きっと優秀な人は、さらさらっとベクトル計算とかでチューニングするとおもうのですが、さらさらっとできな私は、仕事でもないのにそんなのやってられないです・・・。
fp32演算がオフロードできるM.2モジュール作ってくれないかしらん。
TL;DR
Xavier-NXで基本サポートされないROS2 Humbleも以下のパッケージがインストールできました。
・realsense-ros
・ydlidar_ros2_driver
・navigation2
最低限いけますよね。ただし、導入の労力は10倍です。
動作確認
パラメータチューニングがイマイチで申し訳ない感じですが、動くってわかってることが大事ですよね。
2年くらい前に、Humbleだ、と思ったのですが、動いたって記事は有るのですが、どのへんまで動くのか書いてないんですよね。
入っているコマンド・ツール類の関係で、動かないことが多いっていう記事も多いので、当時私が知りたかった、とりあえず動くという備忘録になります。
いろんな先達達には感謝しかないですね。
リンクを貼りたかったのですが、だいぶん前の話で見つけられませんでした。
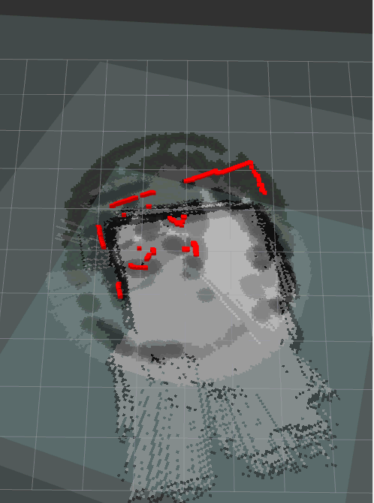
SLAMモードで動作
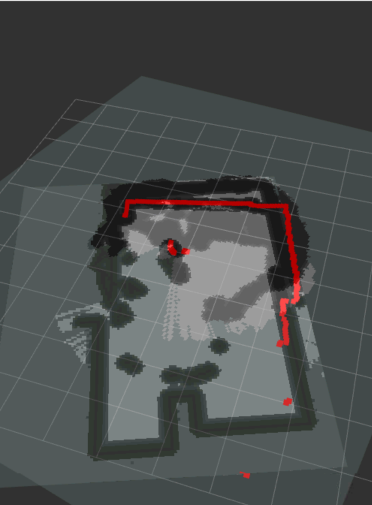
NAVIモードで動作
今は、Jazzy動かないかなっと思っているのですが・・・。
インストールされていたもの
私的に大事な備忘録
ros2 pkg list
action_msgs
action_tutorials_cpp
action_tutorials_interfaces
action_tutorials_py
actionlib_msgs
ament_cmake
ament_cmake_auto
ament_cmake_copyright
ament_cmake_core
ament_cmake_cppcheck
ament_cmake_cpplint
ament_cmake_export_definitions
ament_cmake_export_dependencies
ament_cmake_export_include_directories
ament_cmake_export_interfaces
ament_cmake_export_libraries
ament_cmake_export_link_flags
ament_cmake_export_targets
ament_cmake_flake8
ament_cmake_gen_version_h
ament_cmake_gmock
ament_cmake_google_benchmark
ament_cmake_gtest
ament_cmake_include_directories
ament_cmake_libraries
ament_cmake_lint_cmake
ament_cmake_nose
ament_cmake_pep257
ament_cmake_pytest
ament_cmake_python
ament_cmake_ros
ament_cmake_target_dependencies
ament_cmake_test
ament_cmake_uncrustify
ament_cmake_vendor_package
ament_cmake_version
ament_cmake_xmllint
ament_copyright
ament_cppcheck
ament_cpplint
ament_flake8
ament_index_cpp
ament_index_python
ament_lint
ament_lint_auto
ament_lint_cmake
ament_lint_common
ament_mypy
ament_package
ament_pep257
ament_pycodestyle
ament_uncrustify
ament_xmllint
angles
bond
bond_core
bondcpp
bondpy
builtin_interfaces
camera_calibration
camera_calibration_parsers
camera_info_manager
class_loader
common_interfaces
composition
composition_interfaces
compressed_depth_image_transport
compressed_image_transport
console_bridge_vendor
costmap_queue
cv_bridge
demo_nodes_cpp
demo_nodes_cpp_native
demo_nodes_py
depth_image_proc
depthimage_to_laserscan
desktop
diagnostic_aggregator
diagnostic_common_diagnostics
diagnostic_msgs
diagnostic_remote_logging
diagnostic_updater
diagnostics
domain_coordinator
dummy_map_server
dummy_robot_bringup
dummy_sensors
dwb_core
dwb_critics
dwb_msgs
dwb_plugins
eigen3_cmake_module
example_interfaces
examples_rclcpp_minimal_action_client
examples_rclcpp_minimal_action_server
examples_rclcpp_minimal_client
examples_rclcpp_minimal_composition
examples_rclcpp_minimal_publisher
examples_rclcpp_minimal_service
examples_rclcpp_minimal_subscriber
examples_rclcpp_minimal_timer
examples_rclcpp_multithreaded_executor
examples_rclpy_executors
examples_rclpy_minimal_action_client
examples_rclpy_minimal_action_server
examples_rclpy_minimal_client
examples_rclpy_minimal_publisher
examples_rclpy_minimal_service
examples_rclpy_minimal_subscriber
examples_tf2_py
fastrtps_cmake_module
geometry2
geometry_msgs
image_geometry
image_pipeline
image_proc
image_publisher
image_rotate
image_tools
image_transport
image_view
interactive_markers
intra_process_demo
joy
kdl_parser
keyboard_handler
laser_geometry
launch
launch_ros
launch_testing
launch_testing_ament_cmake
launch_testing_ros
launch_xml
launch_yaml
libcurl_vendor
libstatistics_collector
libyaml_vendor
lifecycle
lifecycle_msgs
logging_demo
map_msgs
message_filters
mimick_vendor
nav2_amcl
nav2_behavior_tree
nav2_behaviors
nav2_bringup
nav2_bt_navigator
nav2_collision_monitor
nav2_common
nav2_constrained_smoother
nav2_controller
nav2_core
nav2_costmap_2d
nav2_dwb_controller
nav2_graceful_controller
nav2_lifecycle_manager
nav2_map_server
nav2_mppi_controller
nav2_msgs
nav2_navfn_planner
nav2_planner
nav2_regulated_pure_pursuit_controller
nav2_rotation_shim_controller
nav2_route
nav2_rviz_plugins
nav2_simple_commander
nav2_smac_planner
nav2_smoother
nav2_theta_star_planner
nav2_util
nav2_velocity_smoother
nav2_voxel_grid
nav2_waypoint_follower
nav_2d_msgs
nav_2d_utils
nav_msgs
navigation2
orocos_kdl_vendor
osrf_pycommon
pcl_conversions
pcl_msgs
pendulum_control
pendulum_msgs
performance_test_fixture
pluginlib
pointcloud_to_laserscan
pybind11_vendor
python_cmake_module
python_qt_binding
qt_dotgraph
qt_gui
qt_gui_cpp
qt_gui_py_common
quality_of_service_demo_cpp
quality_of_service_demo_py
rcl
rcl_action
rcl_interfaces
rcl_lifecycle
rcl_logging_interface
rcl_logging_spdlog
rcl_yaml_param_parser
rclcpp
rclcpp_action
rclcpp_components
rclcpp_lifecycle
rclpy
rcpputils
rcutils
realsense2_camera
realsense2_camera_msgs
realsense2_description
resource_retriever
rmw
rmw_connextdds
rmw_connextdds_common
rmw_cyclonedds_cpp
rmw_dds_common
rmw_fastrtps_cpp
rmw_fastrtps_dynamic_cpp
rmw_fastrtps_shared_cpp
rmw_implementation
rmw_implementation_cmake
robot_state_publisher
ros2action
ros2bag
ros2cli
ros2cli_common_extensions
ros2cli_test_interfaces
ros2component
ros2doctor
ros2interface
ros2launch
ros2lifecycle
ros2lifecycle_test_fixtures
ros2multicast
ros2node
ros2param
ros2pkg
ros2run
ros2service
ros2test
ros2topic
ros_base
ros_core
ros_environment
ros_testing
rosbag2
rosbag2_compression
rosbag2_compression_zstd
rosbag2_cpp
rosbag2_interfaces
rosbag2_py
rosbag2_storage
rosbag2_storage_default_plugins
rosbag2_test_common
rosbag2_tests
rosbag2_transport
rosgraph_msgs
rosidl_adapter
rosidl_cli
rosidl_cmake
rosidl_default_generators
rosidl_default_runtime
rosidl_generator_c
rosidl_generator_cpp
rosidl_generator_py
rosidl_parser
rosidl_runtime_c
rosidl_runtime_cpp
rosidl_runtime_py
rosidl_typesupport_c
rosidl_typesupport_cpp
rosidl_typesupport_fastrtps_c
rosidl_typesupport_fastrtps_cpp
rosidl_typesupport_interface
rosidl_typesupport_introspection_c
rosidl_typesupport_introspection_cpp
rpyutils
rqt_action
rqt_bag
rqt_bag_plugins
rqt_common_plugins
rqt_console
rqt_graph
rqt_gui
rqt_gui_cpp
rqt_gui_py
rqt_image_view
rqt_msg
rqt_plot
rqt_publisher
rqt_py_common
rqt_py_console
rqt_reconfigure
rqt_service_caller
rqt_shell
rqt_srv
rqt_tf_tree
rqt_topic
rti_connext_dds_cmake_module
rttest
rviz2
rviz_assimp_vendor
rviz_common
rviz_default_plugins
rviz_ogre_vendor
rviz_rendering
rviz_rendering_tests
rviz_visual_testing_framework
sdl2_vendor
self_test
sensor_msgs
sensor_msgs_py
shape_msgs
shared_queues_vendor
slam_toolbox
smclib
spdlog_vendor
sqlite3_vendor
sros2
sros2_cmake
statistics_msgs
std_msgs
std_srvs
stereo_image_proc
stereo_msgs
tango_icons_vendor
teleop_twist_joy
teleop_twist_keyboard
test_bond
test_interface_files
test_msgs
test_tf2
tf2
tf2_bullet
tf2_eigen
tf2_eigen_kdl
tf2_geometry_msgs
tf2_kdl
tf2_msgs
tf2_py
tf2_ros
tf2_ros_py
tf2_sensor_msgs
tf2_tools
tf_transformations
tinyxml2_vendor
tinyxml_vendor
tlsf
tlsf_cpp
topic_monitor
topic_tools
topic_tools_interfaces
tracetools
tracetools_image_pipeline
trajectory_msgs
turtlesim
uncrustify_vendor
unique_identifier_msgs
urdf
urdf_parser_plugin
v4l2_camera
vision_msgs
vision_opencv
visualization_msgs
yaml_cpp_vendor
ydlidar_ros2_driver
zstd_vendor