Dronecode Foundation は、オープンソースのプロジェクトのためのベンダー中立な財団です。Linux Foundation の傘下で、米国を拠点とする非営利団体です。

オートパイロット、ミッションプランナー、通信プロトコル、宣言型 API、フライトコントローラーなどのプロジェクトを保有しています。
プロジェクト
Dronecode は、以下4つのUAV関連のプロジェクトを作成および維持しています。
PX4 Autopilot  7.1k
7.1k

PX4 Autopilot は、プロフェッショナルなオートパイロットです。自立型の固定翼・マルチコプター・VTOL 機体の誘導・ナビゲーション・制御アルゴリズムと、姿勢と位置の推定機能を提供します。
世界クラスの開発者によって開発され、活発な世界規模のコミュニティによってサポートされています。レーシングドローンや貨物ドローン、地上車両や潜水艦に至るまで、あらゆる種類の車両に活用されています。
MAVLink 1.5k

MAVLink は、ドローン(及びドローンが搭載しているコンポーネント)と通信するための非常に軽量なメッセージングプロトコルです。
MAVLink は、最新のハイブリッド パブリッシュ/サブスクライブ及びP2Pの設計パターンに則っています。データストリームはトピックとして公開されますが、ミッションプロトコルやパラメータプロトコルなどの構成サブプロトコルは再送信を伴う P2P 通信です。
MAVSDK 0.5k

MAVLink ベースの UAV 向けのコントロールステーションです。機体の更新、構成、調整に使用できます。コントロールステーションにはミッションプランナーが備わっていて、ミッションを追跡します。
このライブラリは、1台以上の車両を管理し、車両情報やテレメトリへのプログラムによるアクセス、及びミッション・移動・その他の操作を行うためのシンプルな API を提供します。ライブラリは、ドローンに搭載されたコンピュータ上で使用したり、地上局やモバイルデバイスとして使用できたりします。
Linux、macOS、Windows、Android、iOS のクロスプラットフォームです。
QGroundControl 2.7k

QGroundControl は、PX4 または ArduPilot 搭載車両の完全な飛行制御と車両セットアップを提供します。初心者にとっては分かりやすく、ベテランのユーザにはハイエンドな機能を提供します。
特徴
- 車両のセットアップ
- 車両の飛行サポート
- 自立飛行のためのミッション作成
- 車両の位置、飛行軌跡、ウェイポイント、車両計器を示すフライトマップ
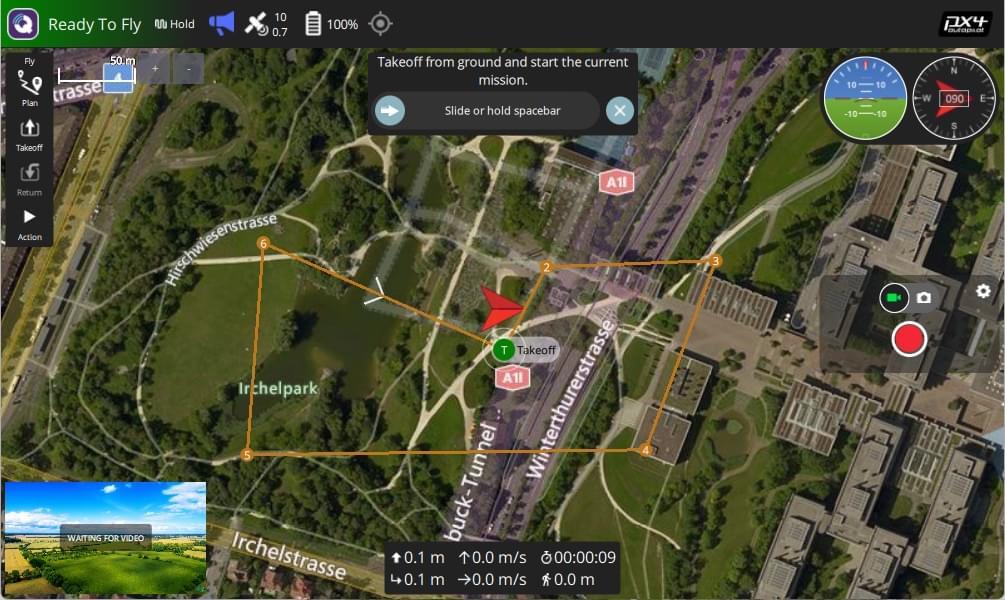
- 計器をオーバーレイ表示したビデオストリーミング

- 複数の車両の管理
- クロスプラットフォーム(Windows、OS X、Linux、iOS、Android)
歴史
始まりは 2011 年に、ドローンやその他の無人車両用のオープンソース飛行制御ソフトウェアである PX4 が誕生したことです。スイスのチューリッヒ工科大学のエンジニアチームによって開発され、ドローンコミュニティですぐに人気を博しました。
数年が経ち、2014 年に Dronecode Foundation が設立されました。この財団は、ドローンやその他の無人車両のオープンソースプロジェクトの促進と開発を目的とした非営利団体です。ドローンの進歩という共通の目標を目指す開発者、メーカー、ユーザーのコミュニティで構成されています。
2019 年に MAVSDK が MAVLink プロジェクトの下に移動されたのは重要な出来事でした。MAVSDK は開発者がドローンのアプリケーションを作成するためのライブラリであり、MAVLink はドローンシステムのさまざまなコンポーネントが相互に通信できるようにするメッセージングプロトコルです。これら2つのプロジェクトを1つの傘下に収めることで、開発者は強力な統合ドローンアプリケーションを簡単に作成できるようになりました。
2021 年には、ペイロードバスの表中を含む複数の Pixhawk 標準を立ち上げました。これは、ペイロードモジュールをドローンのフライトコントローラに接続する方法を定義する新しい規格です。これは、異なるペイロードモジュール間の柔軟性と相互運用性の向上を可能にするため、ドローンペイロードの世界において大きな前進となります。
2011: PX4 の誕生
2014: Dronecode Foundation の創設
2019: MAVSDK が MAVLink プロジェクトに移行
2021: Pixhawk 標準の開始: ペイロード バス標準、FMUv5X Dronecode Foundation の参加メンバーは 33 を超え、さらに増加中
メンバー
Drone Foundation のメンバーには、33 の企業が属しています。


