どうもこんにちは!
ご覧いただきありがとうございます。
エンジニアをやっているまるさんかく(@Marusankaku_E)と申します。
初投稿です。
前置き(読み飛ばし推奨)
皆さん、ダイエットは行っていますでしょうか。
自分は正月でかなり太ってしまったこともあってダイエットに勤しんでいます。
継続していきたいとは考えつつ、飽き性の自分にはいつまで続けられるのやらと不安の中過ごしています。
物事を習慣化するためには記録をとると良いというのを知り、顔を定期的に撮影することでダイエット状況を記録したいと思ったのが作成のきっかけです。
実現したいこと
毎日特定の時間に顔を撮影してくれるマシンを作成する
機能
- 指定した日時になったら顔を探して撮影する
- 撮影後、次回撮影時刻を設定し待ち状態に入る
- 撮影できなかった場合は一定時間待ってから再度トライする
実現方法
ハード
Raspberry pi + サーボモータ + カメラ
ソフト
python(カスケード分類器による顔検出)
構成
- raspberry pi 4B
- カメラモジュール
- Pan/Tilt 機構作成キット
カメラの向きを制御するのに使用します。
サーボモータが二つ付いており、縦横方向にカメラを動かすことができます。
組み立ても簡単です。
接続図

動作
モードを5つに分割して、状態を遷移させることによって動作を実現しました。
また、キー入力によって動作を停止できるような作りにしました。
- WAITモード
指定された時刻まで待つモード - SEARCHモード
サーボを動かしながら顔を探すモード - ADJUSTモード
カメラ位置を微調整して撮影タイミングを調整するモード - CAPTUREモード
画像を撮影するモード - ENDモード
終了するモード

ソースコード
GitHubにソースコードをアップロードしています。
AutoCaptureFace GitHub
全部記載すると記事が長くなり過ぎるのでメインコードのみ下記に記載します。
注意
下記コードは単体では動作しません。
使用する場合は上記GitHubからCloneして使用してください。
import argparse
import cv2
import datetime
import multiprocessing
import os
import time
from enum import Enum
from pynput import keyboard
from common import load_yaml, dump_yaml
from wait_time import wait_at_time
from ServoMotor import ServoMotor
from FaceDetector import FaceDetector
class Mode(Enum):
"""
動作モード
"""
WAIT = 0 # 待ち状態
SEARCH = 1 # 顔探索状態
ADJUST = 2 # カメラ調整状態
CAPTURE = 3 # 撮影状態
END = 4 # 終了
class AutoCaptureFace():
"""
顔を検出して写真を撮影・保存するクラス
撮影間隔は設定ファイルで調整する
"""
def __init__(self, setting_path: str, output_dir: str) -> None:
"""
Args:
setting_path (str): 設定ファイルのパス
output_dir (str): 撮影画像保存フォルダのパス
"""
self.mode = multiprocessing.Value('i', Mode.WAIT.value)
self.output_dir = output_dir
self.setting = load_yaml(setting_path)
self.setting_path = setting_path
self.update_interval = self.setting['update_interval']
self.research_interval = self.setting['research_interval']
servo_setting = load_yaml(self.setting["servo_setting_path"])
self.servo_motor_horizontal = ServoMotor() # 横方向のサーボモータ
self.servo_motor_vertical = ServoMotor() # 縦方向のサーボモータ
self.servo_motor_horizontal.load_setting(servo_setting["horizontal"])
self.servo_motor_vertical.load_setting(servo_setting["vertical"])
self.detector = FaceDetector(self.setting["camera_setting_path"])
self.detector.start()
def change_mode(self, mode: Enum) -> None:
"""
実行モードを変更する
Args:
mode (str): 実行モード
"""
if self.mode.value != Mode.END.value: # 終了フラグON時はモードを変更しない
self.mode.value = mode.value
def waiting(self) -> None:
"""
待ち状態
設定された時刻まで待機する
"""
target_date = self.setting['target_date']
target_time = datetime.datetime(int(target_date["year"]),
int(target_date["month"]),
int(target_date["day"]),
int(target_date["hour"]),
int(target_date["minute"]),
int(target_date["second"]))
# target_time = datetime.datetime.now() + datetime.timedelta(seconds=1)
print(f"wait at: {target_time}")
wait_at_time(target_time, self.mode)
self.change_mode(Mode.SEARCH)
def serching(self) -> None:
"""
顔探索状態
カメラを動かしながら顔を探す
"""
self.servo_motor_horizontal.start()
self.servo_motor_vertical.start()
self.detector.start()
is_detected = False
min_angle_h = self.servo_motor_horizontal.min_angle
max_angle_h = self.servo_motor_horizontal.max_angle
min_angle_v = self.servo_motor_vertical.min_angle
max_angle_v = self.servo_motor_vertical.max_angle
for angle_v in range(min_angle_v, max_angle_v, 10):
self.servo_motor_vertical.set_angle(angle_v)
for angle_h in range(min_angle_h, max_angle_h, 10):
self.servo_motor_horizontal.set_angle(angle_h)
_, face = self.detector.detect()
time.sleep(0.5)
print(face)
if len(face) > 0:
print("detected")
is_detected = True
break
if is_detected or self.mode.value == Mode.END.value:
break
if is_detected or self.mode.value == Mode.END.value:
self.change_mode(Mode.ADJUST)
else:
self.servo_motor_horizontal.set_ini_angle()
self.servo_motor_vertical.set_ini_angle()
self.servo_motor_horizontal.stop()
self.servo_motor_vertical.stop()
self.detector.stop()
time.sleep(self.research_interval["second"])
def adjusting(self) -> None:
"""
カメラ調整状態
顔を追従して撮影タイミングを調整する
"""
detected_time = time.perf_counter()
center_x = self.detector.cam_setting["center"][0]
center_y = self.detector.cam_setting["center"][1]
while True:
# 顔検出して座標取得
_, face = self.detector.detect()
if len(face) > 0:
is_adjusted_h = False
is_adjusted_v = False
face_x = face[0][0] + face[0][2] / 2
face_y = face[0][1] + face[0][3] / 2
if face_x > center_x + 10:
self.servo_motor_horizontal.set_angle(self.servo_motor_horizontal.angle + 1)
elif face_x < center_x - 10:
self.servo_motor_horizontal.set_angle(self.servo_motor_horizontal.angle - 1)
else:
is_adjusted_h = True
if face_y > center_y + 10:
print("y+")
self.servo_motor_vertical.set_angle(self.servo_motor_vertical.angle + 1)
elif face_y < center_y - 10:
print("y-")
self.servo_motor_vertical.set_angle(self.servo_motor_vertical.angle - 1)
else:
is_adjusted_v = True
if is_adjusted_h and is_adjusted_v:
print("ready")
self.change_mode(Mode.CAPTURE)
break
print(f"h:{self.servo_motor_horizontal.angle}, v:{self.servo_motor_vertical.angle}")
detected_time = time.perf_counter()
else:
if time.perf_counter() - detected_time > 30: # 30秒以上未検出
print("time_over")
self.change_mode(Mode.SEARCH)
break
if self.mode.value == Mode.END.value:
break
def capturing(self) -> None:
"""
撮影状態
画像を撮影する
"""
img, _ = self.detector.detect()
date_now = datetime.datetime.now()
output_dir = os.path.join(self.output_dir, str(date_now.year), str(date_now.month))
output_file_name = f"{date_now.year}_{str(date_now.month).zfill(2)}_{str(date_now.day).zfill(2)}_{str(date_now.hour).zfill(2)}_{str(date_now.minute).zfill(2)}_face.jpg"
output_file = os.path.join(output_dir, output_file_name)
os.makedirs(output_dir, exist_ok=True)
cv2.imwrite(output_file, img)
print("capture")
self.change_mode(Mode.WAIT)
self.servo_motor_vertical.pi.stop()
self.servo_motor_horizontal.pi.stop()
self.detector.stop()
self.update_target_date()
def update_target_date(self) -> None:
"""
次の撮影日時を設定する
"""
target_date = self.setting['target_date']
target_time = datetime.datetime(target_date["year"],
target_date["month"],
target_date["day"],
target_date["hour"],
target_date["minute"],
target_date["second"])
target_time += datetime.timedelta(days=self.update_interval["day"],
hours=self.update_interval["hour"],
minutes=self.update_interval["minute"],
seconds=self.update_interval["second"])
self.setting["target_date"]["year"] = target_time.year
self.setting["target_date"]["month"] = target_time.month
self.setting["target_date"]["day"] = target_time.day
self.setting["target_date"]["hour"] = target_time.hour
self.setting["target_date"]["minute"] = target_time.minute
self.setting["target_date"]["second"] = target_time.second
dump_yaml(self.setting_path, self.setting)
def press(self, key) -> None:
"""
キーボードのタイピングを検出し、終了フラグをONにする
Args:
key (keyboard.KeyCode): キー入力
"""
try:
print(f'アルファベット {0} が押されました'.format(key.char))
self.change_mode(Mode.END)
except AttributeError:
print(f'スペシャルキー {0} が押されました'.format(key))
self.change_mode(Mode.END)
def __call__(self):
listener = keyboard.Listener(on_press=self.press)
listener.start()
while True:
if self.mode.value == Mode.WAIT.value:
self.waiting()
elif self.mode.value == Mode.SEARCH.value:
self.serching()
elif self.mode.value == Mode.ADJUST.value:
self.adjusting()
elif self.mode.value == Mode.CAPTURE.value:
self.capturing()
elif self.mode.value == Mode.END.value:
break
else:
break
self.servo_motor_horizontal.stop()
self.servo_motor_vertical.stop()
def main(setting_path: str, output_dir: str) -> None:
"""
メイン関数
Args:
setting_path (str): 設定ファイルのパス
output_dir (str): 撮影画像保存フォルダのパス
"""
AutoCaptureFace(setting_path, output_dir)()
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument('--setting_path', default="../data/yaml/auto_capture_setting.yaml")
parser.add_argument('--output_dir', default="../output/")
args = parser.parse_args()
main(args.setting_path, args.output_dir)
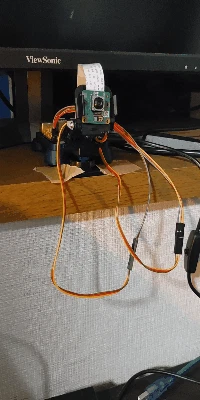
完成物
完成物が以下です。
固定方法が雑なのは目を瞑ってください。

-
SEARCHモード中の動作
-
ADJUSTモード中の動作
動作が緩やかになる後半部分がADJUSTモード中の動作です。

感想
記事化を意識してこういったものを作ったのは初めてだったので、かなり時間がかかってしまいました。(一か月)
時間はかかりましたが、結構使えるものができたんじゃないかなと思います。
1月頭から2キロ痩せましたが、顔ってあんまり痩せないですね。
最後に
毎日自分の顔を撮影してくれるマシンを作りました。
既に遅れが出始めていますが、今年は毎月1本を目標に記事投稿を続けていく予定です!
作りたてですが、良ければTwitter(X)もよろしくお願いします。
参考にさせていただいた記事