1.今回の環境
- 本体 AGX Xavier
- Orin が手に入れば良かったのですが…JetPack5.0.1DPがインストール可能というとで
- JetPackはNVMeにインストール
- 今回は普通にUbuntu上のSDKmanagerよりインストール
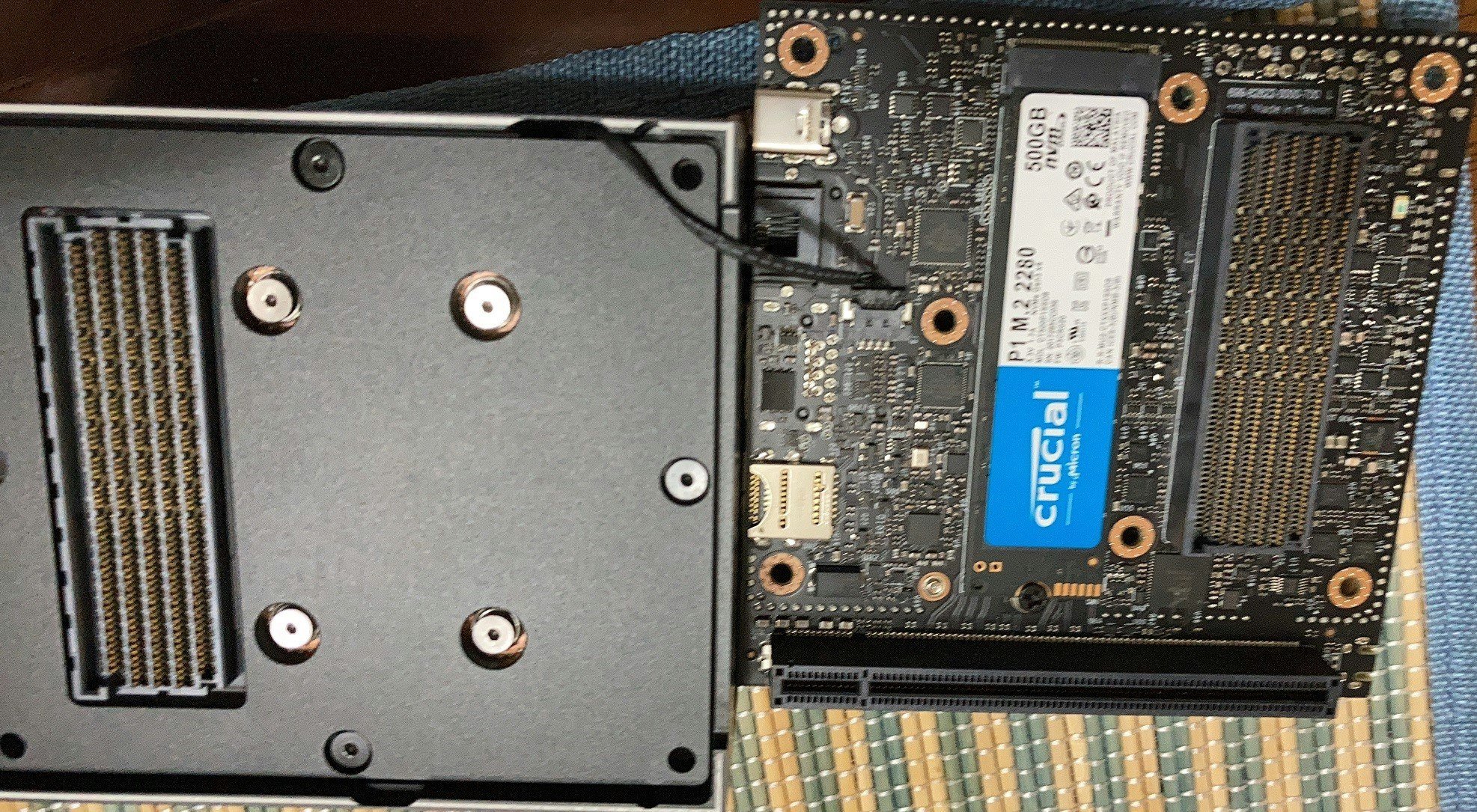
- 写真左がAGX Xavierのボード(ヒートシンクつき)で、右側がキャリアボードになります。
- NVMe SSDは500GBを使用。
- eMMCは使いませんでした。
注意
無線LAN使用の場合はPCIeのものかUSB WiFiドングルになると思いますが、予め有線でセットアップした方いいです。
- 素のOSだけでいきなりWiFi ドングルを接続しても通信できません。
- 今回TP Linkのrtl8812auドングルでしたので情報が豊富でドライバも準備していました。
- 一般的にはDKMSでインストールになるのでその時にネットにつなげていないと使えないという…
- 今回はDKMSにせずに普通にビルドしてインストール。なんとかなりました。

- 参考リンク(その他紹介されている方のサイトでご自分にあうものを参照下さい)
2. ROS, ROS2セットアップ
- 手抜きですいませんが、拙作のROS, ROS2セットアップのページを挙げておきます。
- こちらにはOmniverseはインストールしません。
- ROSの設定後、ROS2の設定後のbashrcの編集は気を付けてください。
インフォメーション
- ROSはnoetic
- ROS2はFoxyをインストールできます。
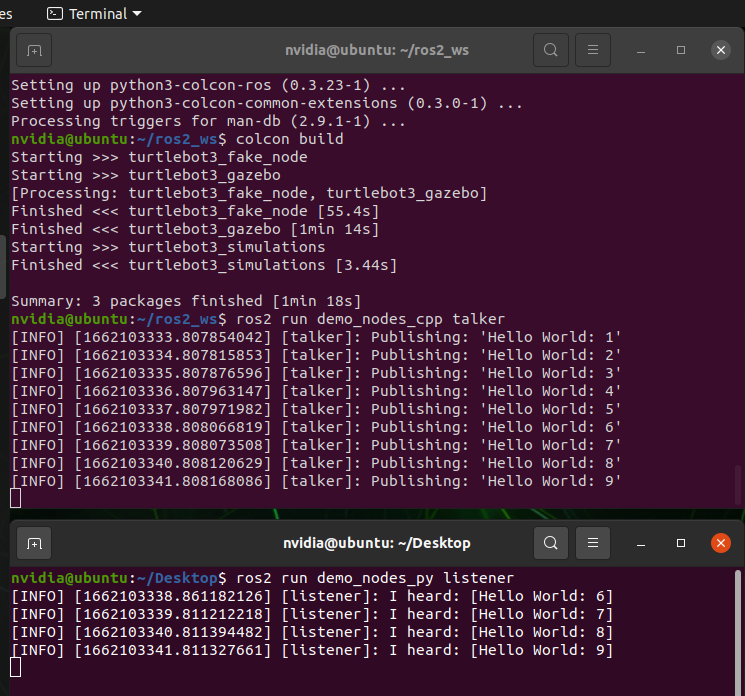
- セットアップが正常にできているか2つターミナルを立ち上げて応答をみます。
terminal_1(送る側)
ros2 run demo_nodes_py talker
terminal_2(受ける側)
ros2 run demo_nodes_py listener
- 正常に応答すれば画面の様に受け側が応えます。