はじめに
この記事はWHILL Advent Calendar 2018の15日目の記事です。
前回同様に、大好きなM5StackでWHILLを動かしてみたシリーズです。
前回の記事はこちら
M5StackでWHILL Model CRの電源をON/OFFしてみた
今回はJoystick moduleでModel CRを動かしてみます。

接続方法やModel CR Arduino SDK(esp32)の使用方法は前回記事を参照ください。
注意点
今回の記事は実際に機体を走行させるものになります。
Model CRは人も乗れるモビリティですので、誤った操作でケガや物損する可能性があります。
実際に実施する場合は自己責任かつ、事故などに十分注意して行ってください。
もし危険だと思った際は、
- 電源OFFする
- バッテリーを抜く
- RS232Cケーブルを外す
- 機体を持ち上げて後輪を浮かせる
など即時に対応してください。
また、最初お試しで動かす際は、後輪を浮かせた状態で実験するのがオススメです。

準備するもの
- WHILL Model CR
- M5Stack
- M5Stack Joystick module
- M5Stack comm module(WANT)
comm moduleはJoystickを接続するのにあれば便利ですが、なくてもI2Cのポートに接続すれば使えます。
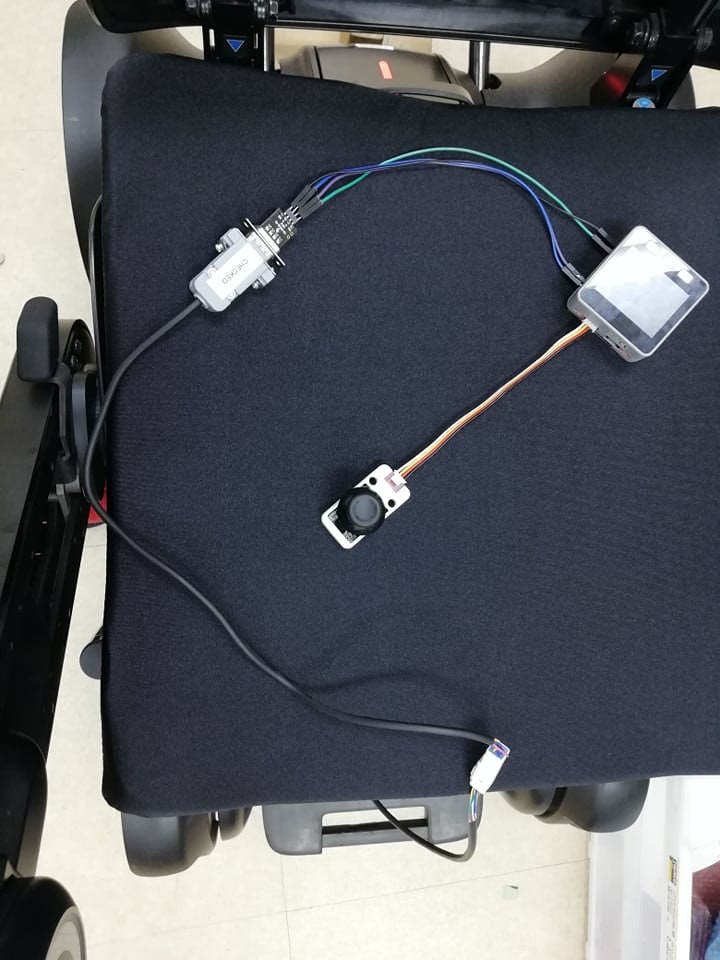
接続するとこのようになります。
Joystick制御のコーディング
Joystick moduleのセンサー値の取得はM5Stack exampleのJoystickのコードを参考にしました。
Model CR側は、Arduino SDKのsetJoystick(joy_x, joy_y)関数を使用すれば実際に動きます。
joy_x, joy_yには-100 ~ 100の値を設定してください。
前進後進:joy_y
左右:joy_x
となります。
joystick moduleの値は中心 128程度の0 ~ 256程度の範囲を取るuint8_tの値になっていましたので、
適当に-100 ~ 100に変換します。
具体的にはコードはこのようになります。
このコードも動作補償をしたものではありませんですので、参考にされる方は自己責任でご使用ください。
# include <M5Stack.h>
# include "WHILL.h"
# include "Wire.h"
# define JOY_ADDR 0x52
uint8_t x_data;
uint8_t y_data;
uint8_t button_data;
char data[100];
const uint8_t NEUTRAL = 120;
const int8_t MAX_TH = 100;
const int8_t MIN_TH = 10;
WHILL whill(&Serial2);
bool is_power_on = false;
void setup()
{
Serial.begin(115200);
// Power ON Stabilizing...
delay(500);
M5.begin();
Wire.begin(21, 22, 400000);
}
int8_t convertJoystick(uint8_t ext_joy)
{
int8_t conv_joy = ext_joy - NEUTRAL;
if(conv_joy >= 0){
if(abs(conv_joy) < MIN_TH) return 0;
conv_joy -= MIN_TH; //offset;
if(abs(conv_joy) >= MAX_TH) return MAX_TH;
return conv_joy;
}else{
if(abs(conv_joy) < MIN_TH) return 0;
conv_joy += MIN_TH; //offset;
if(abs(conv_joy) >= MAX_TH) return -MAX_TH;
return conv_joy;
}
}
void loop() {
Wire.requestFrom(JOY_ADDR, 3);
if (Wire.available()) {
x_data = Wire.read();
y_data = Wire.read();
int8_t conv_y = convertJoystick(y_data);
int8_t conv_x = convertJoystick(x_data);
button_data = Wire.read();
sprintf(data, "x:%d y:%d button:%d\n", conv_x, conv_y, button_data);
Serial.print(data);
if(button_data == 1){
if(is_power_on){
whill.setPower(false);
is_power_on = false;
}else{
whill.setPower(true);
is_power_on = true;
}
}else{
whill.setJoystick(conv_x, conv_y);
}
}
delay(10);
}
ついでに、joystick押し込むとボタンになっていたので、それで電源ON/OFFも出来るようにしました。
実際に動かしている様子です。
乗りながら撮ったからずっと見てると酔いますので注意。
M5Stackのjoystick moduleでWHILL Model CRを動かしてみた。#M5Stack #WHILL pic.twitter.com/igMAd2uzi8
— Katsushun89 (@katsushun89) 2018年12月14日
Joystickが引っかかるところがあってたまに中心に戻ってこないので、ちょっと怖かったです。(笑)
最後に
前回同様にM5StackでModel CRを動かしてみました。
SDKが用意してあるので動かすのもかなり簡単に出来ました。
コードも添付したもの+SDKだけです。
是非試してみてください。