経緯
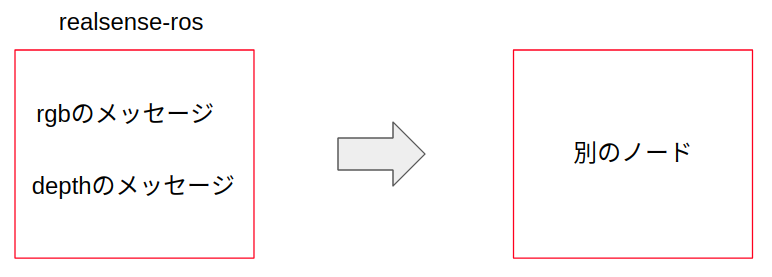
最近realsenseの入力ノードであるrealsense-ros(intel公式)に触れる機会があったのですが、あることに気が付きました。あれ、これってrgbデータとdepthデータがセットでメッセージとして送られてないやん、と。自分は下のような状態を期待していました。
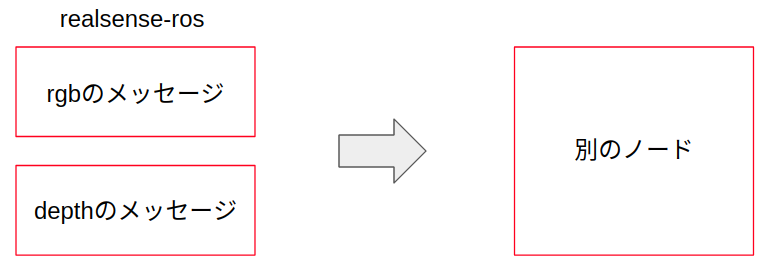
しかし、実際は下のようにrgbデータとdepthデータは別々のノードでpublishされていました。
これでは、同じ瞬間に撮影されたrgbデータとdepthデータをセットとして使いたい場合、不便です。そこで、自分が思いついた方法は2つあります。1つは同じタイムスタンプのrgbとdepthのmessageを結合してpublishする方法です。もう1つは、受け取るノード側で、同じタイムスタンプのrgbとdepthのmessageが来た場合のみcallback関数を呼ぶというものです。今回は2つ目の方法を、ROSのmessage_filtersを使ってやってみた手順を共有します。
手順
1. realsense-ros側の設定
まず入力ノードであるrealsense-ros側での設定をしていきます。rs_camera.launchのenable_syncというパラメーターをtrueにします。これにより、rgbとdepthで同じタイムスタンプがあった場合、同じタイミングでまとめてpublishしてくれます。ただし、同じタイムスタンプが無い場合もどちらか1つだけでpublishするので、以下のようにソースコードを変更しました。if文を加えて、publishするvectorのサイズが2(rgbとdetphが揃っている)の場合のみpublishするようにしています。
void BaseRealSenseNode::frame_callback(rs2::frame frame)
{
~~省略~~
if (frames_to_publish.size() == 2)
{
for (auto it = frames_to_publish.begin(); it != frames_to_publish.end(); ++it)
{
}
}
}
これにより、pubilshされるrgbとdepthのメッセージのタイムスタンプは同じになりました。次に、メッセージを受け取るノード側の処理を書いていきます。
2. message_filtersによる同期処理
メッセージのタイムスタンプは同じですが、rgbとdepthでノードは別々です。そこで、message_filtersを使います。message_filtersは複数のメッセージタイムスタンプが同じ場合、指定のcallback関数を呼び出せるというものです。最大9つまで同期させることができます。公式に詳しい説明が書いてあります。今回は公式通りにやってみました。
# include <message_filters/subscriber.h>
# include <message_filters/synchronizer.h>
# include <message_filters/sync_policies/exact_time.h>
# include <sensor_msgs/Image.h>
# include <sensor_msgs/CameraInfo.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& rgb_msg, const ImageConstPtr& depth_msg)
{
// Solve all of perception here...
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> rgb_sub(nh, "/camera/image_raw", 1);
message_filters::Subscriber<Image> depth_sub(nh, "/camera/depth_raw", 1);
typedef sync_policies::ExactTime<Image, Image> MySyncPolicy;
// ExactTime takes a queue size as its constructor argument, hence MySyncPolicy(10)
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), rgb_sub, depth_sub);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
これで、rbgとdepthからのメッセージのタイムスタンプが同じ場合のみcallback関数が呼ばれるようになりました。ただ、気をつけてほしいのは、受けとり側のノードをクラスとして作成している場合、subscriberをどこで初期化すればいいかわかりませんでした。クラスのコンストラクタで初期化してみましたが、うまくいかなかったので、クラスでやるのをやめました。もし、やり方を知ってる方いらしたら教えていただきたいです。タイムスタンプが近い場合にcallback関数を呼び出したい場合は、ApproximateTime Policyを使えばいけます。
まとめ
ROS面白くなってきました。
間違いや質問、ご意見等ありましたらお気軽にコメントください。頑張って答えますので(笑)。