はじめに
DynamixelモータをROSで動かすための準備としてIDの振り分けの仕方についてまとめました。
IDの振り分けをしないとモータを識別できないので必ず最初に行いましょう。
前提
通信プロトコルが2.0のDynamixelモータであること
準備
用意するもの
- 設定するDynamixelモータ
- 給電用ケーブル
- MicroUSB(MicroB-USB A)ケーブル
- PC
- 電源(12V)
- U2D2
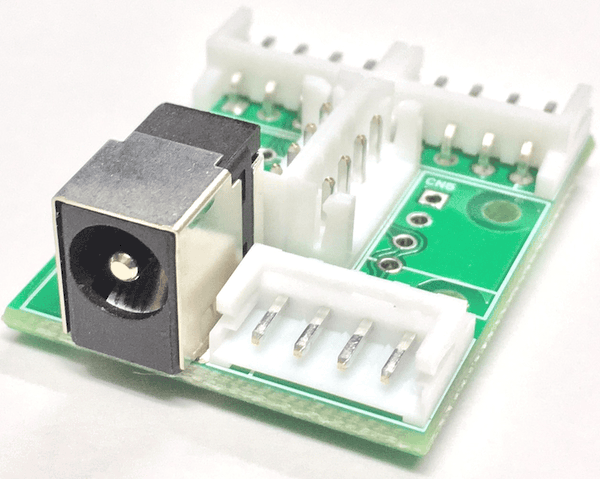
- DXSharingBoard(RS485)
- Robot Cable-X4P(U2D2, Dynamixelモータに付属のケーブル)
 |
 |
 |
|---|---|---|
| U2D2 | DXSharingBoard(RS485) | Robot Cable-X4P |
インストール
DynamixelモータをGUIで操作できるDYNAMIXEL Wizardをインストールします。
公式サイトからOSに合うインストーラをダウンロードし、記載されている手順通りに進めます。
セットアップ
インストールが完了したらDYNAMIXEL Wizardを使ってモータのセットアップをしていきます。
制御するにはモータ毎にIDを振り分ける必要があるので、そのやり方を見ていきましょう。
それでは、下の画像を参考に用意したものを配線してPCに接続し、電源を入れ、インストールしたDYNAMIXEL Wizardを起動しましょう。
※画像では複数のモータを接続していますが、セットアップの際に接続するモータは必ず一つにしてください

Scanの準備
接続したモータを検出するためにまずは左上のOptionsを選択
Scanのタブを選択し、上から順に
- Protocol2.0のみをチェック
- Select Allをチェック
- 57600 bpsをチェック(モータによっては異なる可能性あり)

画像のように選択したらOKを選択
ホーム画面に戻ったらScanを選択して検出を開始します。
左に接続したモータの型番が表示されればOK!
※検出ができない場合は電源の入れ忘れ、Optionsのbpsが合っていないなどの原因が考えられます。
Ubuntu環境ならUSBのパーミッションの変更し忘れも考えられます。
IDの振り分け
では、IDを振っていきましょう。
真ん中のAddress:7、 Item:IDの欄を選択します。
右下にIDを選択する欄が表示されるので指定する番号を選択し、SaveでIDの振り分けが完了します。画像のようになればOK!

IDの振り分けが完了したモータはDisconnectで接続を解除し、電源をOFFにしてモータを切断しましょう。
以上がIDの振り分けでした。 ![]()
セットアップのまとめ
まとめると
- モータを接続
- 電源ON
- Scan開始
- IDを振る
- Disconnect
- 電源OFF
- モータを切断
となります。モータが複数ある場合は、一つずつ接続し、1~7を繰り返してIDを振りましょう。