■ハックに走った動機
micro:bitに直接繋げられるサーボの台数は、どうやら3台までらしい。16台まで繋げられる拡張ボードなんかも市販されてはいるが、micro:bitのコンパクトさを生かすためにもなるべく拡張ボードは使わず、すっきりとスマートに接続したい。そこで、3台の制限をハックして、6台まで直接繋げる方法をあみ出したので紹介する。
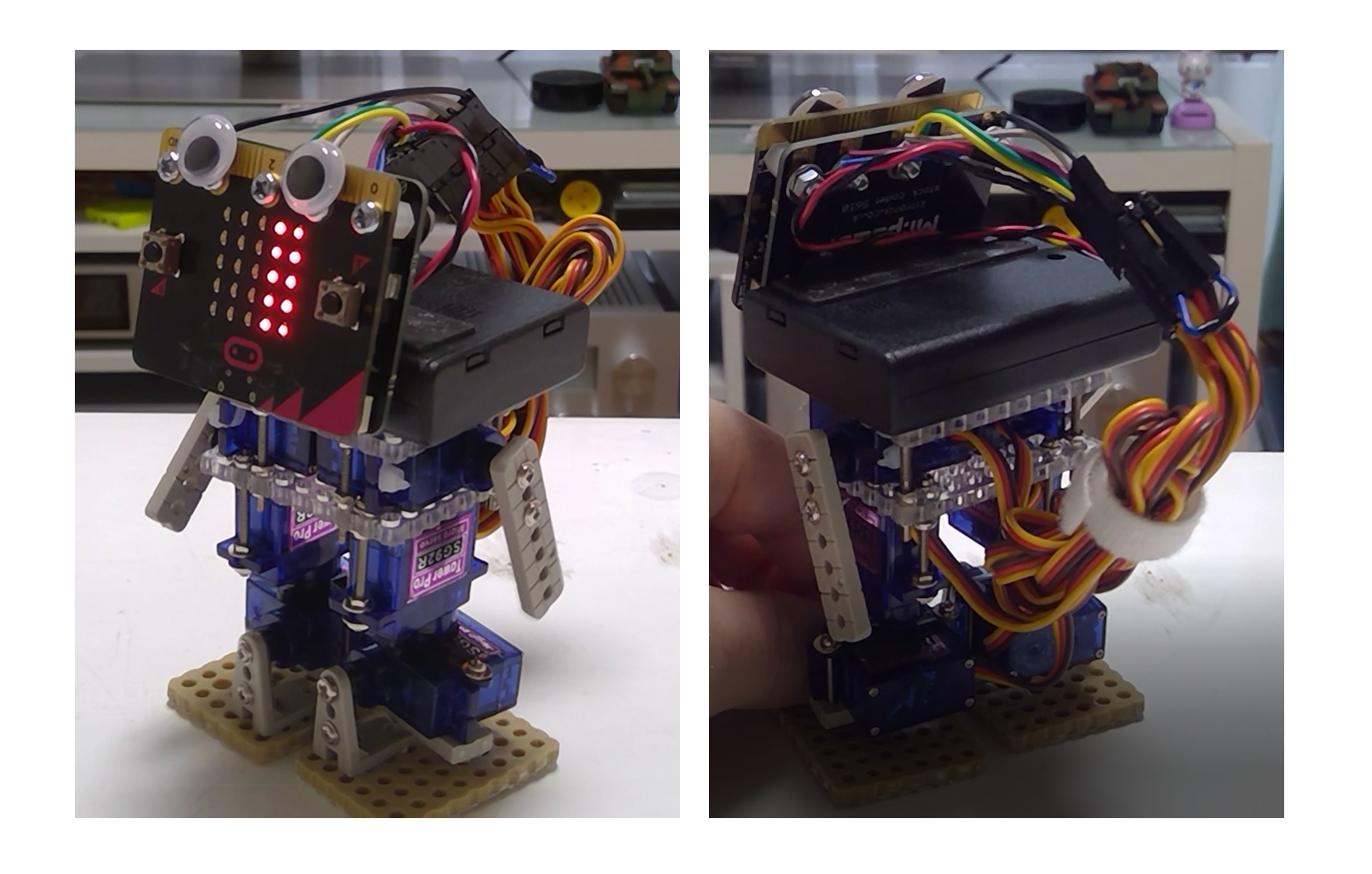
■まずは6台直接繋げて作った2足歩行ロボットの動画を見てほしい
・足2軸のロボット
・サーボは右脚/左脚/右足首/左足首/右腕/左腕の6台
https://youtu.be/G0M1QShnloM
関連記事で、ロボット筐体の作り方はこちらで紹介しています。
https://qiita.com/Google_Homer/items/bf269828fbdf3ce83a8e
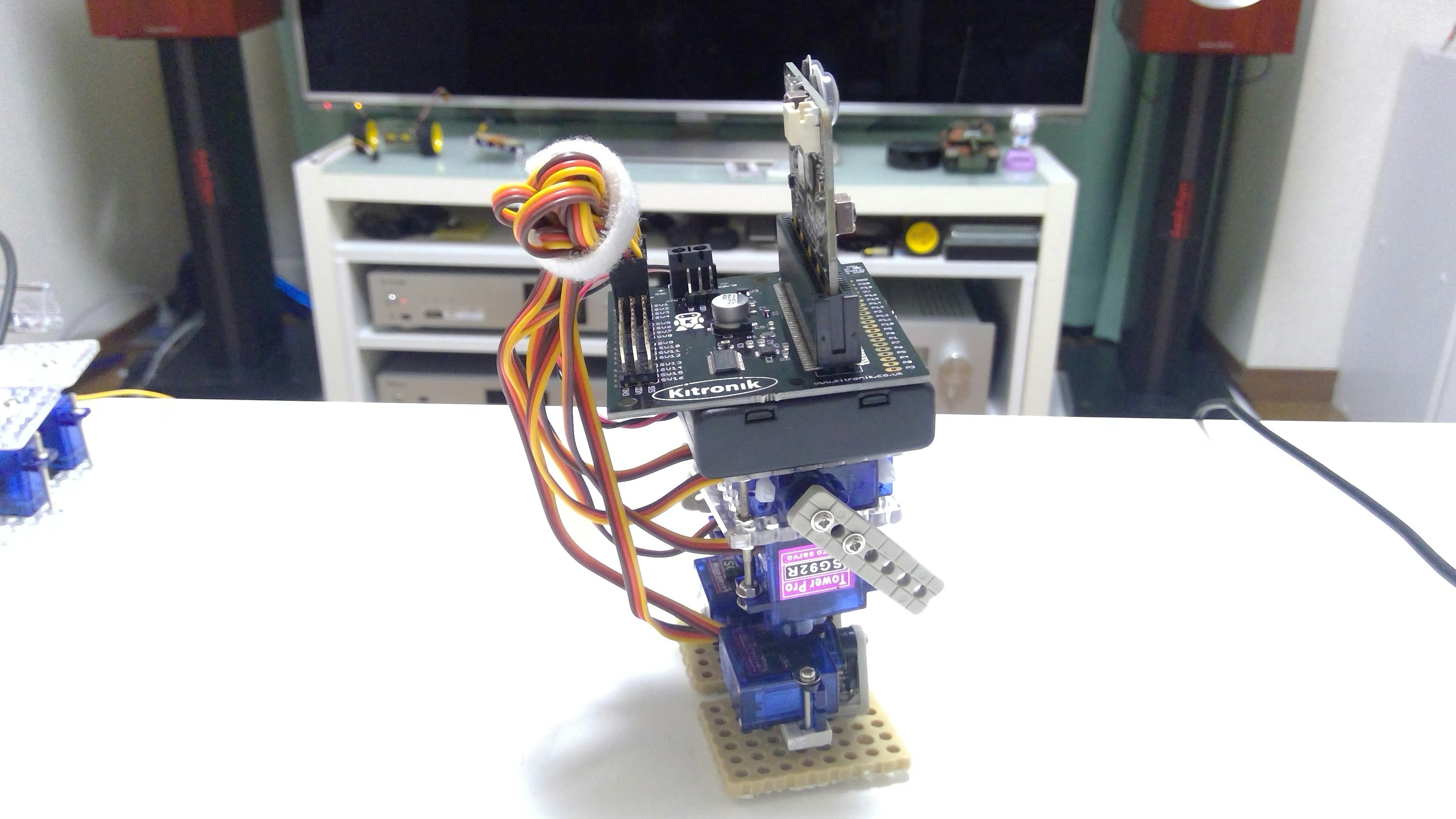
■6台直刺の構成
ロボット本体
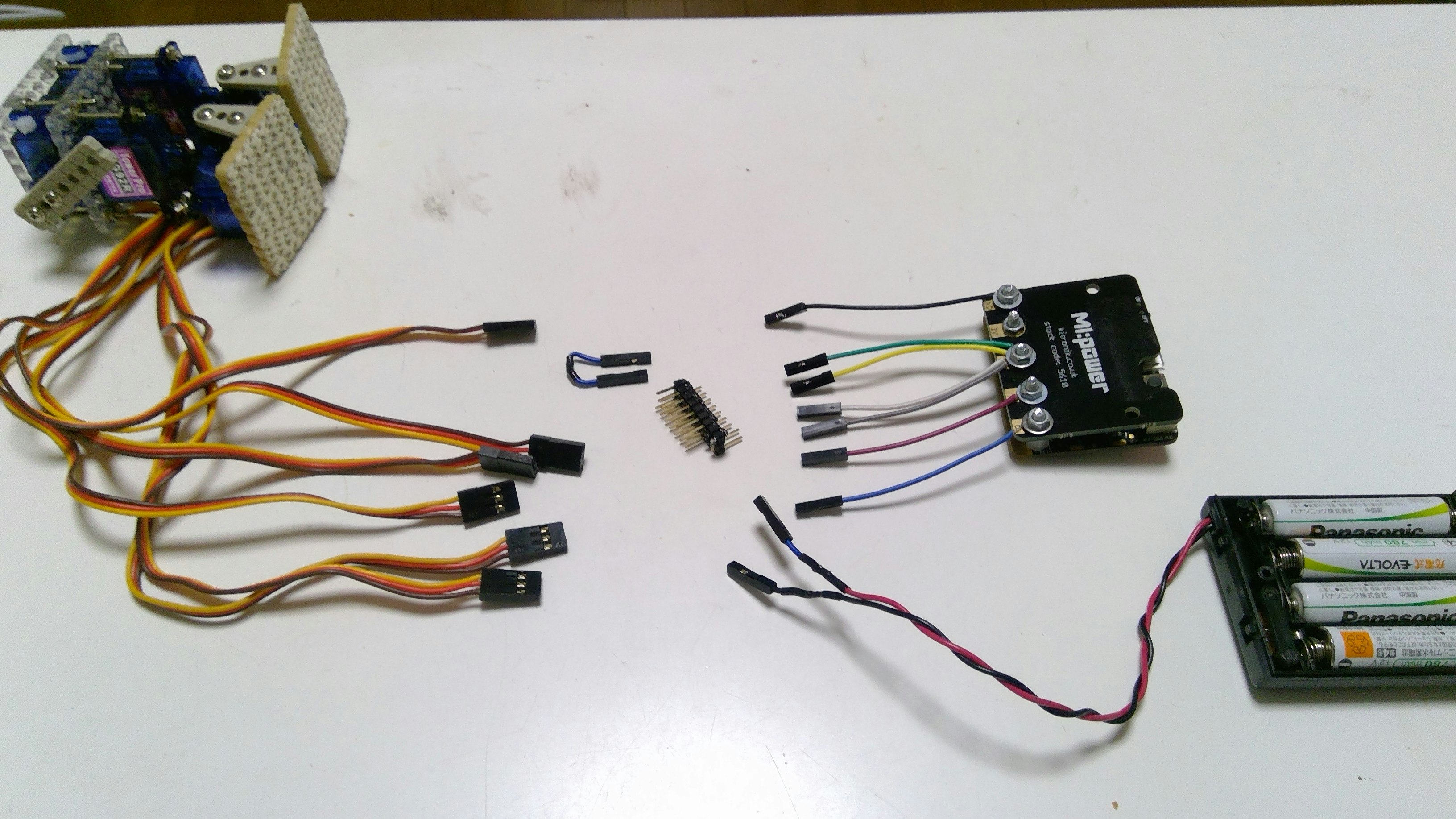
配線は、電子部品なしで単にピンヘッダを経由して接続しているだけ
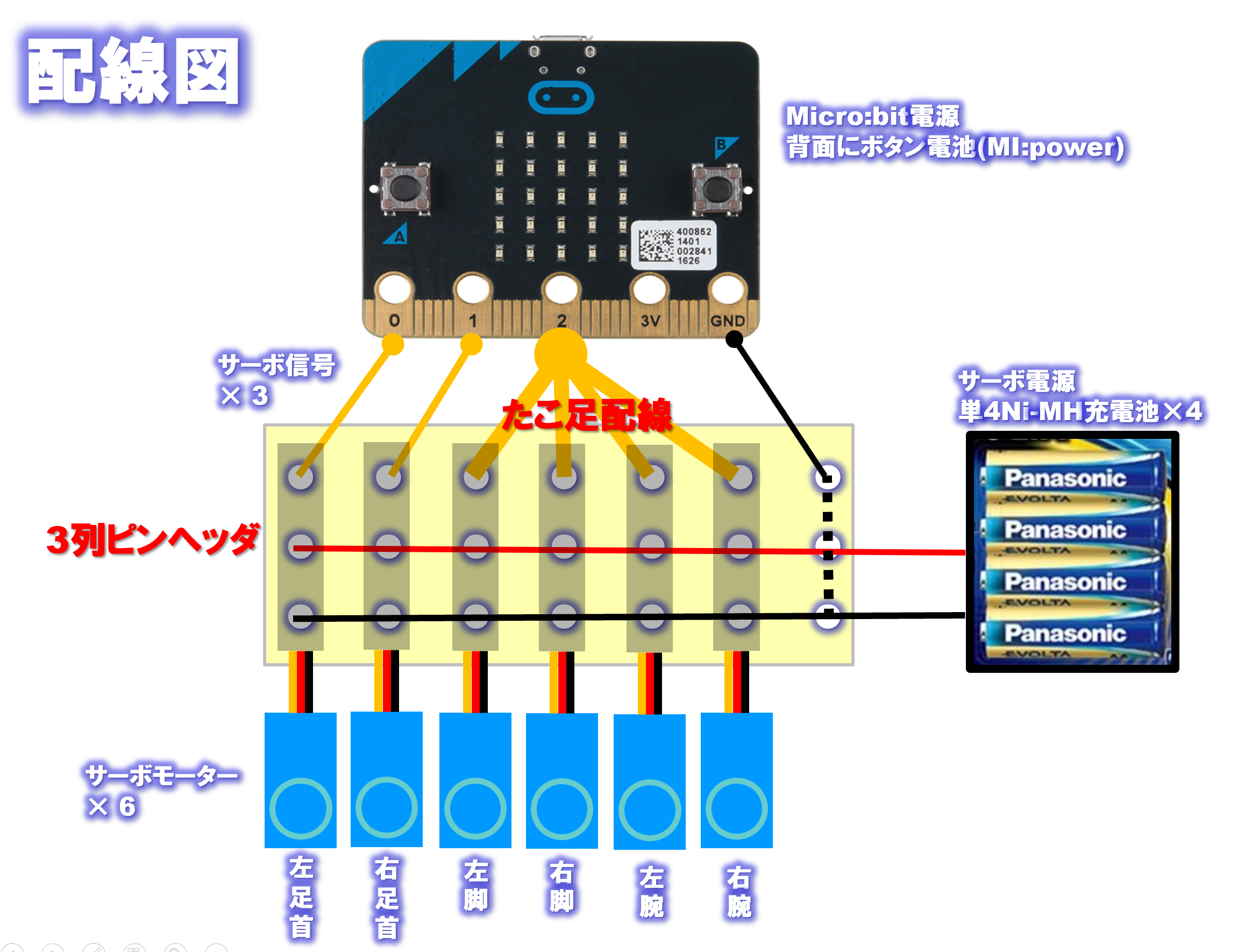
詳しい配線図・・・・なんとなくからくりが見えてくる・・・・
参考までに歩行のブロックプログラム

■はい、6台のサーボ直刺しのからくりは、たこ足配線です
サーボの電源を外部供給し、同一のサーボ信号のSignalを複数のサーボに送る事で実現しています。
■なぜたこ足で同じ角度なのに、ロボットは歩けているのか
たまたま自分の作ったロボットの複数個所のサーボが同じ角度で動作するロジックになっていたので可能*だっただけの話。
P2のサーボーのSignal端子を右腕/左腕/右脚/左脚のサーボにたこ足で接続している。
右脚と左脚が常に同じ角度で動作するという歩行ロジックに依存している。
同様に両脚と左右の腕も同じ角度で動作している。
本来は脚の歩幅と腕の振り幅は別々であるが、同じ幅で妥協している。
また、動画をよくみると脚と腕が同じ方向に動いているが、それもたこ足なので妥協。
まあ、こんな感じで特別な条件下でしか使えないハック技なのである。
今回6台まで試したが、電源の容量が持つ限りもっと行けると踏んでいる。
■結論
こんな記事を書いておいて、こういうのもなんであるが、あまりお勧めはできない。なぜなら、拡張ボードなしでスマートに接続したいというのが発端だったわけであるが、電気的には確かに直刺しになっているが、物理的にはサーボ端子がmicro:bitに直接刺さらないのでピンヘッダを介したり、micro:bit本体のとは別にサーボ用の電源が必要だったりと、あまりスマートではない絵面になってしまったからである。
ということで
利用したいサーボの台数にかかわらず、最初からサーボの拡張ボードを利用した方がよっぽどスマートであるという結論に達した。とはいうものの、何かの参考にはなるかもしれないと思い投稿した。
こなか感じでスッキリと。拡張ボード実装の図。