■昨日4足歩行ロボットの記事を投稿をしました
よくよくプログラムを見たら、左右の足の角度が同じではありませんか!!!

■ということは
①左右たこ足配線すれば、前用サーボ信号と後用サーボ信号の2つの信号を出すだけで行けるはず。
②サーボ2信号だけなら拡張ボードなしで行けるはず。
③ついでにmicro:bit本体の3vをサーボ電源に使っちゃおう。(無茶かな?)
かなりちっちゃいやつができそうである。
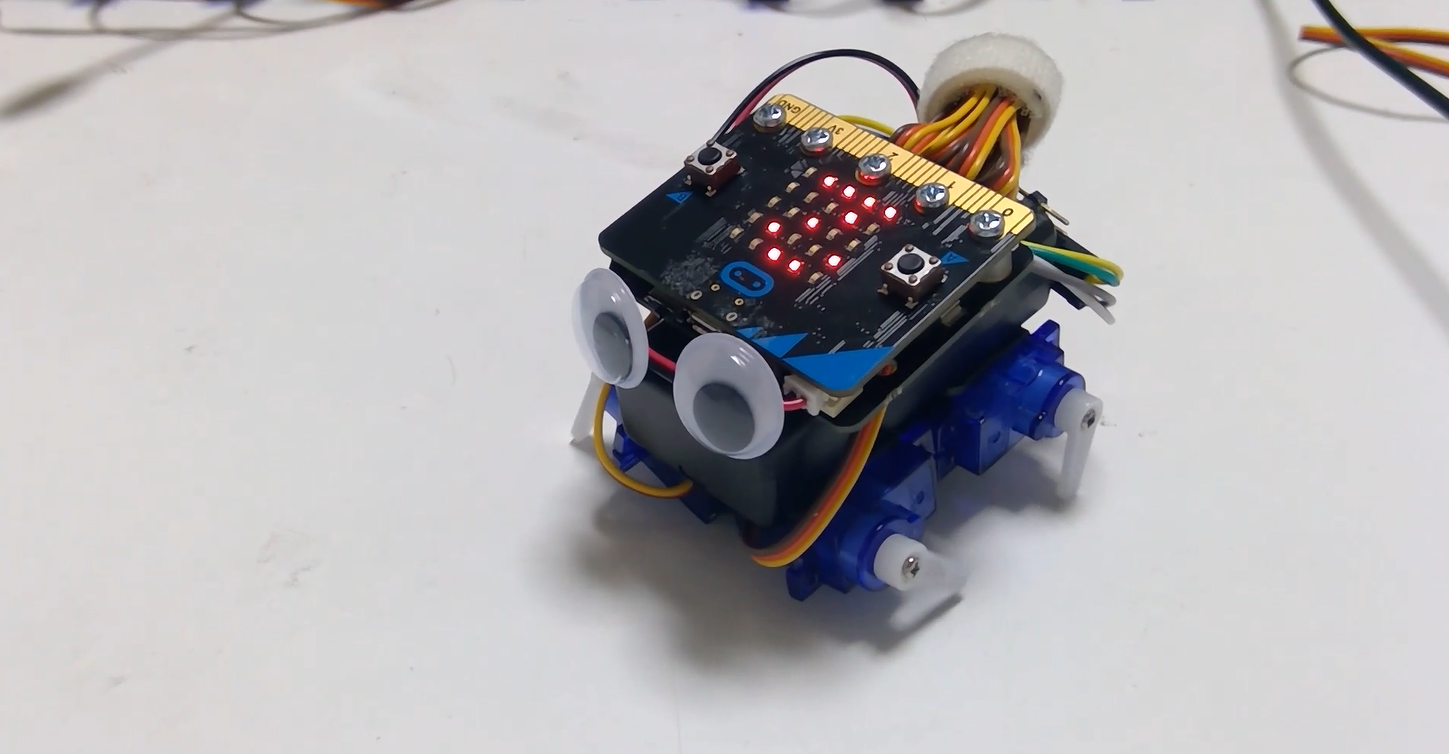
■ということで、サーボ4台直刺しのちっちゃい4足歩行ロボット作っちゃいました
#microbit #4足歩行ロボット
— Google Homer (@google_homer_) 2019年3月13日
4足歩行ロボット、サーボ4台直刺し(拡張基板レス)。micro:bit本体電源の単三乾電池1.5v×2本からの給電で4台のサーボSG90駆動できた。 pic.twitter.com/ofU2Z8sF27
■作り方
サーボはTower ProのSG90を使いました。
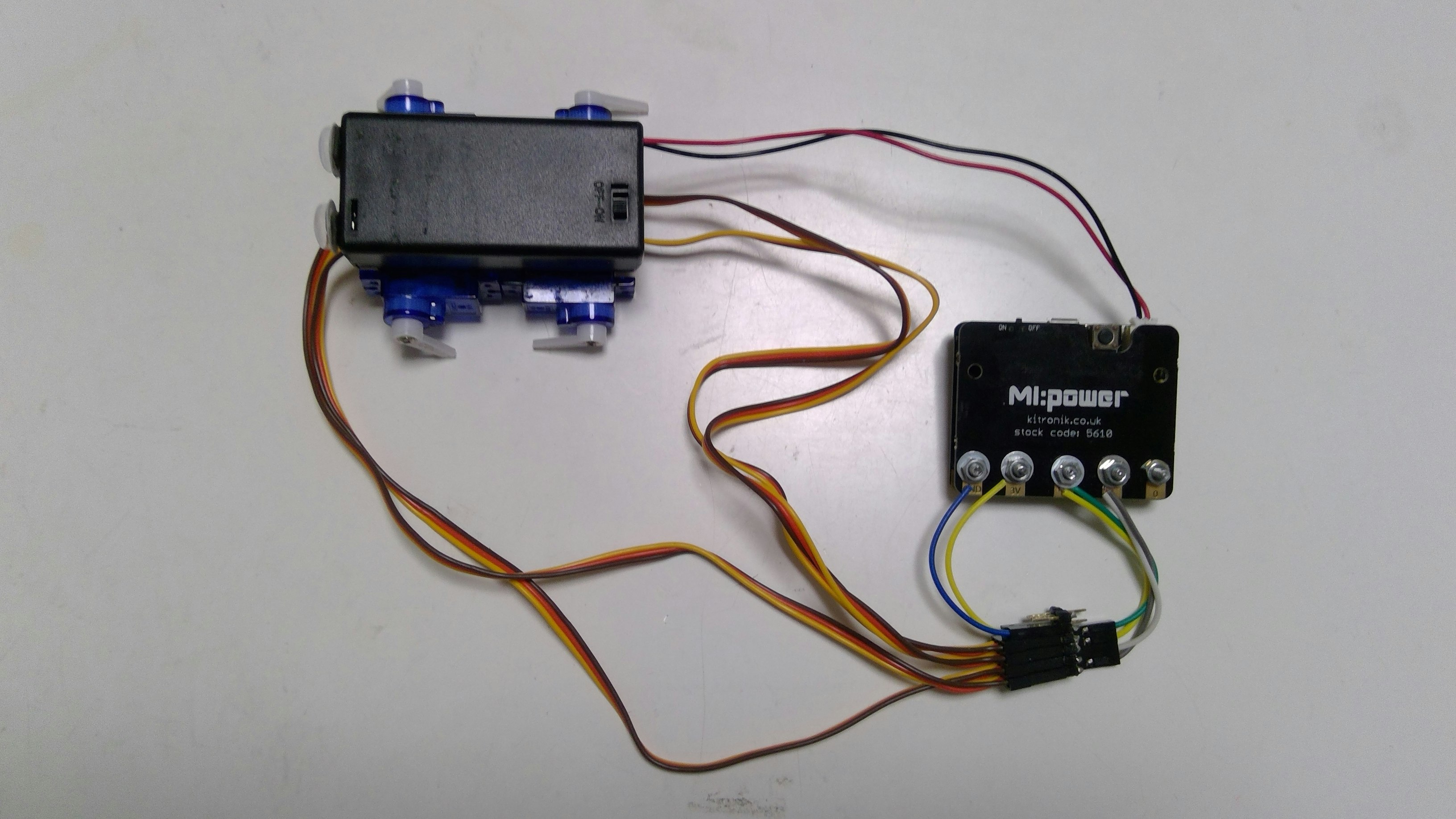
①サーボ4台を写真の方向と位置関係で電池BOXに両面テープで貼り付けます。
②足として、サーボ付属のホーンをネジ止めします。90°の位置で直立するようにして下さい。
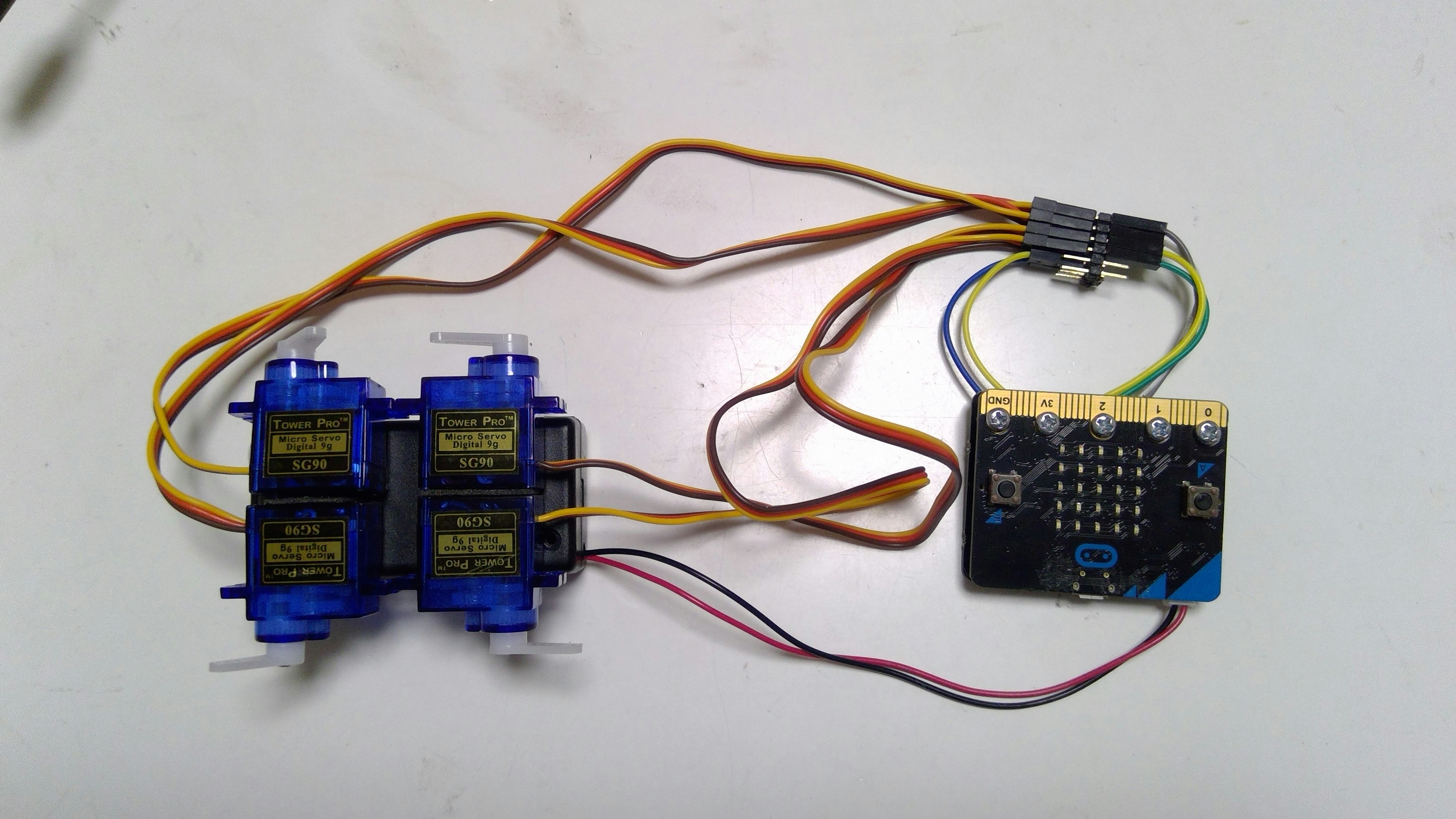
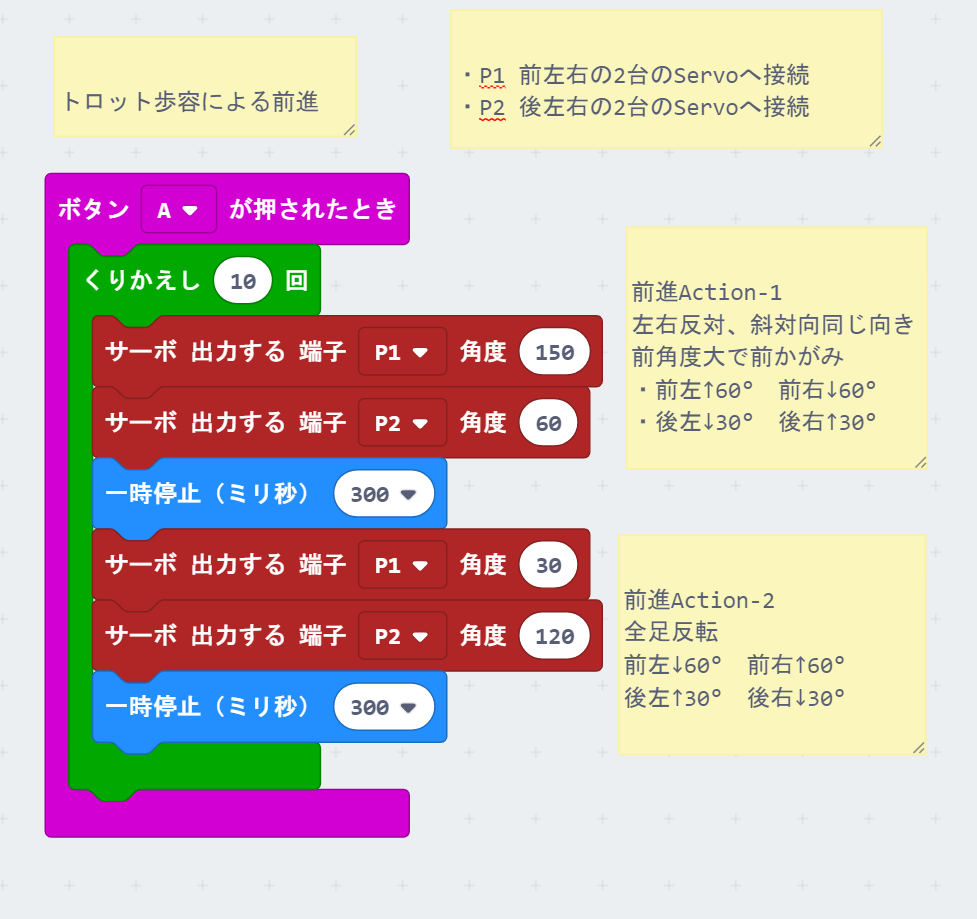
③エッジのP1に、前足のサーボ2台のSignal端子を接続します。
④エッジのP2に、後足のサーボ2台のSignal端子を接続します。
⑤エッジの3V/GNDに、4台のサーボの電源端子を接続します。
➅電源は単三乾電池1.5v×2本です。1.2vの充電池では動きませんでした。
配線は、私はピンヘッダでうまくやりましたが、各自工夫してください。
後は、適当に盛り付けて完成。
■プログラム
ボタンAを押すと10歩あるきます。
コメント中の角度は直立90°からの相対角度です。
まとめ
サーボSG90って3Vでも動くんですね、びっくりしました。ちっちゃいにはちっちゃいのですが、ケーブルが邪魔で、そんなにちっちゃくはなりませんでした。サーボのケーブルを切って短くするという邪心で揺れています。歩き方、少しあやしいのですが、角度微調整して何とかしてみて下さい。
以上です。