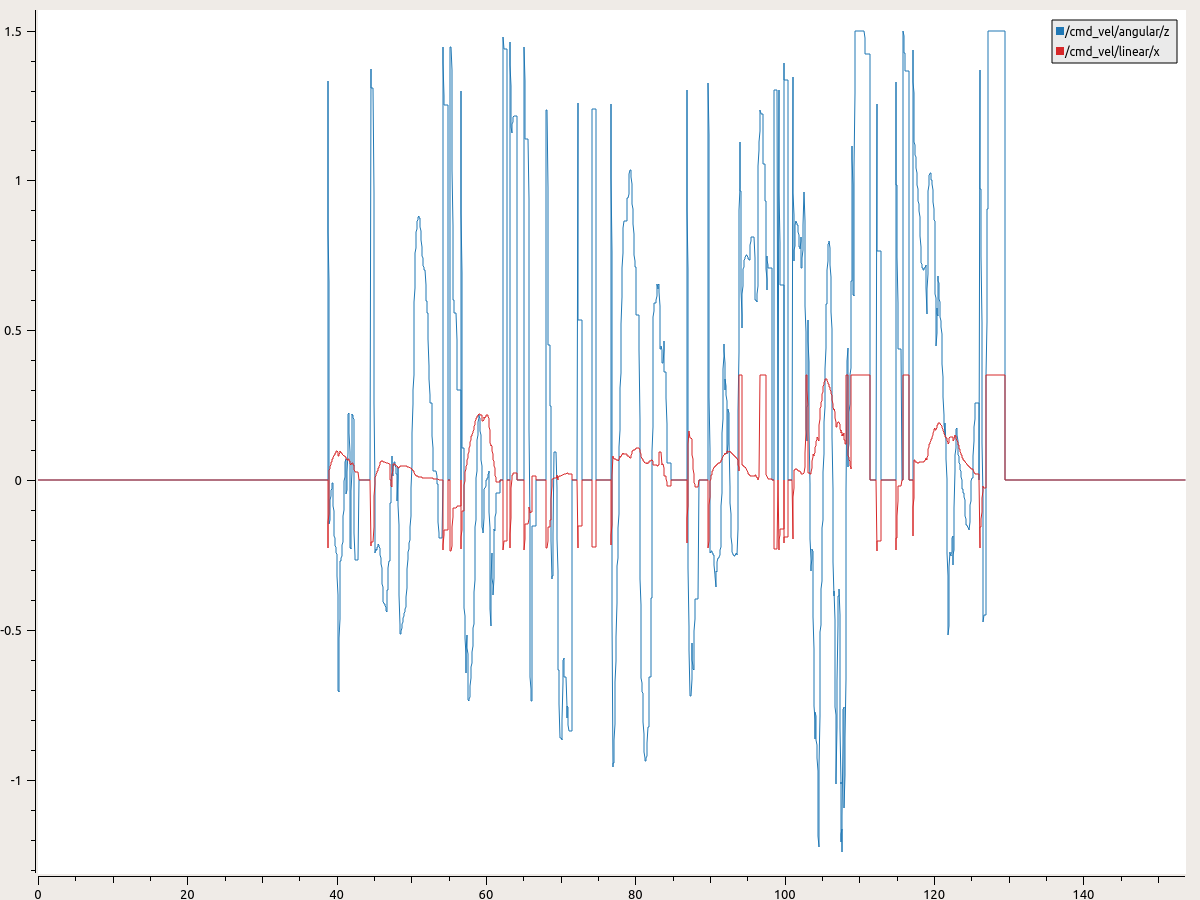
PlotJugglerを用いることでrosbag中のtopicの値を横軸時間, 縦軸topic値のグラフとして可視化することができる.
また, 一度に複数のTopic値の可視化が可能. ロード時間もrqt_bagに比べて短い(と思う)
もちろん再生も可能です
PlotJugglerのインストール
こちらをインストールします
https://index.ros.org/p/plotjuggler/
以下のコマンドでplotjugglerをインストールします。ROS Pluginも同時にインストールされます。
sudo apt install ros-${ROS_DISTRO}-plotjuggler-ros
実行
以下のコマンドで実行できる
rosrun plotjuggler plotjuggler
File>Load Dataと選択し, 解析したいrosbagデータを選択するとrosbag中のTopic一覧が表示されるので, 可視化したいTopicを選択する
あとは以下のgifのように操作すればOK
