1 はじめに
『確率ロボティクス』1によると、SLAMは大きく分けてオンラインSLAMとオフラインSLAM2つの手法に分類される。
オンラインSLAMとは、各時刻において地図と姿勢の事後確率が計算される。
\begin{align}
p(\ x_t,\ m\ |\ z_{1:t},\ u_{1:t}\ ) \tag{1.1}\\
\end{align}
式$(1.1)$を見ていただいてもわかるように、オンラインSLAMでは過去の観測、制御に対し、最新の姿勢$x_t$__だけ__を計算している。逐次最新の姿勢を計算するため、オンラインSLAMは__リアルタイム・アルゴリズム__である。
私が以前に作成した拡張カルマンフィルタ2やパーティクルフィルタ3による自己位置推定アルゴリズムはこのオンラインSLAMに該当する。
一方、オフラインSLAM(_完全SLAM__と言ったりもする)では、最新の姿勢$x_t$だけでなく、ロボットの軌跡全体$x{1:t}$に対して事後確率が計算される。
\begin{align}
p(\ x_{1:t},\ m\ |\ z_{1:t},\ u_{1:t}\ ) \tag{1.2}\\
\end{align}
オフラインSLAMは特定のタイミングで計算が実行されるため、__バッチ・アルゴリズム__となる。
2 Graph-Based SLAM
最近のSLAMの主流はグラフを用いたオフラインSLAMであり、グラフを用いたオフラインSLAMのことを一般的に__Graph-Based SLAM__という4。
今回はこのGraph-Based SLAMをPythonで実装し、その動作を確認していきたいと思う。
なお、実装の際に参考にした論文は"A Tutorial on Graph-based SLAM5"と"graph-based SLAMの解説6"となります。
3 ロボットの姿勢と動作モデル
ロボットの姿勢と動作モデルは書籍『確率ロボティクス』1の「5章 ロボットの動作」を適用するので、詳細は書籍を参考にしてほしい。
よって、ここでは簡単に説明をする。
まず、ある離散的な時刻$t$におけるロボットの姿勢$\boldsymbol{x}$を以下のように定義する。
\begin{align}
\boldsymbol{x}_{t} =
\begin{bmatrix}
x_{t} \\
y_{t} \\
\theta_{t} \\
\end{bmatrix} \tag{3.1}\\
\end{align}
時刻$t$において、ロボットは__並進速度$v_{t}$_と__回転速度$\omega{t}$を与えられ、時刻$t'$に姿勢$\boldsymbol x{t'}$が得られるものとする。しかし、実環境では__並進速度$v{t}$_と__回転速度$\omega{t}$__には雑音が乗るため、以下のような式で表すことができる。
\begin{align}
\begin{bmatrix}
x_{t'} \\
y_{t'} \\
\theta_{t'} \\
\end{bmatrix}
=
\begin{bmatrix}
x_{t} \\
y_{t} \\
\theta_{t} \\
\end{bmatrix}
+
\begin{bmatrix}
-\frac{v_{t}}{\omega_{t}}sin\theta_{t}
+ \frac{v_{t}}{\omega_{t}}sin(\theta_{t}+\omega_{t}\Delta t) \\
\frac{v_{t}}{\omega_{t}}cos\theta_{t}
- \frac{v_{t}}{\omega_{t}}cos(\theta_{t}+\omega_{t}\Delta t) \\
\omega_{t}\Delta t + \gamma_{t}\Delta t \\
\end{bmatrix}
\tag{3.2}\\
\end{align}
但し、
\begin{align}
\begin{bmatrix}
v_{t} \\
\omega_{t} \\
\gamma_{t} \\
\end{bmatrix}
=
\begin{bmatrix}
v^\ast_{t} \\
\omega^\ast_{t} \\
0 \\
\end{bmatrix}
+
\begin{bmatrix}
\varepsilon_{\alpha_1 {v_{t}^\ast}^2 + {\alpha_2 \omega_{t}^\ast}^2} \\
\varepsilon_{\alpha_3 {v_{t}^\ast}^2 + {\alpha_4 \omega_{t}^\ast}^2} \\
\varepsilon_{\alpha_5 {v_{t}^\ast}^2 + {\alpha_6 \omega_{t}^\ast}^2} \\
\end{bmatrix}
\tag{3.3}\\
\end{align}
である。ここで、$v_{t}^\ast$、$\omega_{t}^\ast$はそれぞれ、並進速度、回転速度の真値を表す。また、$\varepsilon$は雑音を表し、$\alpha_1$から$\alpha_6$はロボット固有の雑音パラメータである。ここで、$\varepsilon_b$は平均がゼロで標準偏差が$b$の誤差変数を意味する。
3.1 座標系の定義
Graph-Based SLAMを実装するにあたり、以下3つの座標系を定義する。
世界座標系
世界のある1点を基準とした座標系。静止したランドマークは基本的に世界座標系では移動しない。
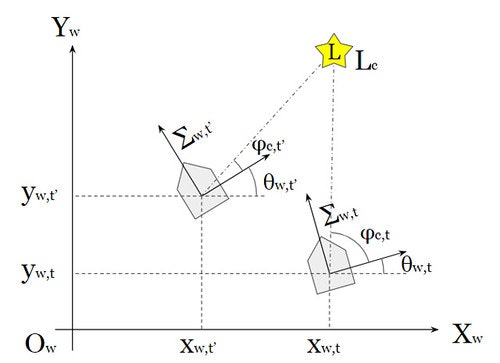
ロボット座標系
ロボット上のある1点を基準とした座標系。基準点はロボットと共に移動していく。よって、静止したランドマークはロボットの移動に伴い、移動していくことになる。
また、ランドマークは基本的にこのロボット座標系で観測される。
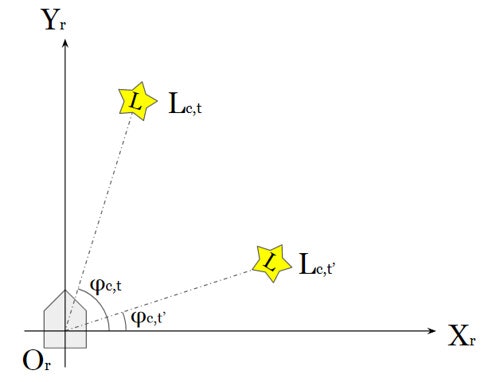
4 ランドマークの観測モデル
ランドマークの観測モデルは"graph-based SLAMの解説6"の「2.2 観測」を適用するのでそちらを参考にしてほしい。よって、ここでは簡単に説明する。
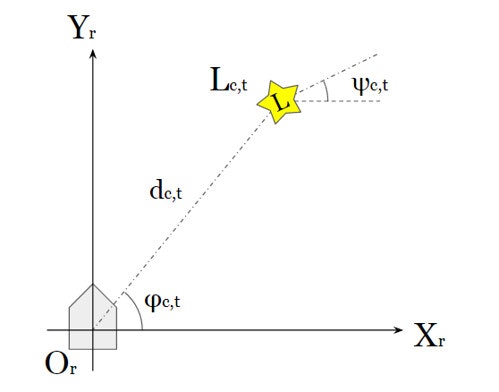
ある離散的な時刻$t$に、ロボット座標系にてランドマーク$L_c$を観測すると、以下3つのランドマークに関する情報が得られるものとする。
- ランドマーク$L_c$までの距離:$d_{c,t}$
- ランドマーク$L_c$が観測された方角:$\varphi_{c,t}$
- ランドマーク$L_c$自身が向いている方角:$\psi_{c,t}$
式で表すと以下のようになる。
\begin{align}
\begin{bmatrix}
d_{c,t} \\
\varphi_{c,t} \\
\psi_{c,t} \\
\end{bmatrix}
=
\begin{bmatrix}
d^\ast_{c,t} \\
\varphi^\ast_{c,t} \\
\psi^\ast_{c,t} \\
\end{bmatrix}
+
\begin{bmatrix}
\varepsilon_{\beta_1 {d^\ast_{c,t}}^2} \\
\varepsilon_{\beta_2} \\
\varepsilon_{\beta_3} \\
\end{bmatrix}
\tag{4.1}\\
\end{align}
$d^\ast_{c,t}$、$\varphi^\ast_{c,t}$、$\psi^\ast_{c,t}$、はそれぞれ真値を表し、$\beta_1$から$\beta_3$はロボット固有の雑音パラメータである。
5 Graph-Based SLAM 問題
5.1 ロボットの相対姿勢計算
問題を解くために、ノード(頂点)とエッジ(辺)を持つグラフを考える。ノードはロボットの各時刻の姿勢に対応しており、エッジは同一のランドマークを観測した2つのノード間に設定される。
このとき、各時刻のロボットの相対姿勢を算出する方法は以下の2通り存在することがわかる。
①各時刻でのノード間における、ロボット推定姿勢の差:$ \Delta \boldsymbol x_{t,t'}$
これは単純に姿勢差を計算すればよい。
\begin{align}
\Delta \boldsymbol{x}_{t,t'} = \boldsymbol{x}_{t'} - \boldsymbol{x}_t
\tag{5.1}\\
\end{align}
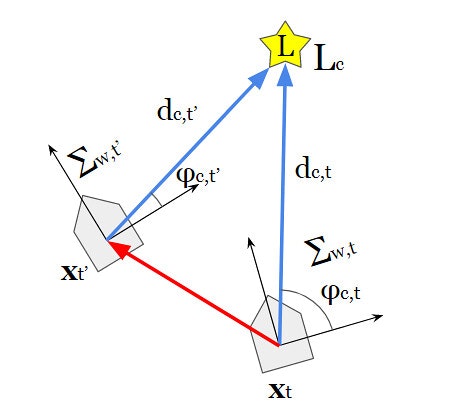
ランドマークを観測した際、観測結果を元にランドマークを基準とした座標系に変換した結果を下図に示す。
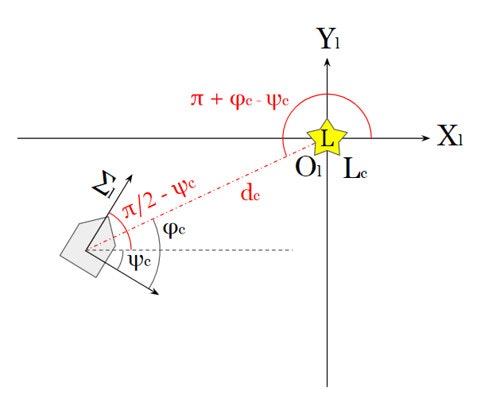
この図より、ランドマークを基準としたロボットの相対姿勢$\boldsymbol x^L_{c}$は以下の式で表される。
\begin{align}
\boldsymbol{x}^L_{c}
=
\begin{bmatrix}
x^L_{c} \\
y^L_{c} \\
\theta^L_{c} \\
\end{bmatrix}
=
\begin{bmatrix}
d_{c} \, cos \left( \pi + \varphi_{c} - \psi_{c} \right) \\
d_{c} \, sin \left( \pi + \varphi_{c} - \psi_{c} \right) \\
\frac{\pi}{2} - \psi_{c} \\
\end{bmatrix}
\tag{5.2}\\
\end{align}
これを、時刻$t$及び、$t'$について計算し、差を求める。
\begin{align}
\Delta \boldsymbol{x}^{L}_{c,t,t'} = \boldsymbol{x}^L_{c,t'} - \boldsymbol{x}^L_{c,t}
\tag{5.3}\\
\end{align}
ここで、$\Delta \boldsymbol x_{t,t'}$と$\Delta \boldsymbol x^L_{c,t,t'}$の差を考える。
\begin{align}
\boldsymbol{e}_{c,t,t'} = \Delta \boldsymbol{x}_{t,t'} - \Delta \boldsymbol{x}^L_{c,t,t'} \tag{5.4}\\
\end{align}
この誤差$\boldsymbol e_{c,t,t'}$がゼロとなるときの$\Delta \boldsymbol x_{t,t'}$つまり、$\boldsymbol x_{t}$と$\boldsymbol x_{t'}$が最適な推定姿勢であると言える。
しかし、各エッジには誤差が含まれていることと、各ノードは他のエッジとも紐付いているため、全ての誤差$\boldsymbol e_{c,t,t'}$がゼロになることはまず有りえない。
よって、全ての誤差$\boldsymbol e_{c,t,t'}$が最適と言える推定姿勢の計算方法を考える必要がある。
5.2 情報行列の計算
情報行列の計算モデルも"graph-based SLAMの解説6"の「3.1.2 $\Sigma_{c,t,t'}, \Omega_{c,t,t'}$の計算」を適用するのでそちらを参考にしてほしい。よって、ここでは簡単に説明する。
\begin{align}
\boldsymbol{\Sigma}_{c,t}
=
\begin{bmatrix}
\left(\beta_1 d^\ast_{c,t}\right)^2 & 0 & 0 \\
0 & \left(d^\ast_{c,t} \ sin \beta_2\right)^2 & 0 \\
0 & 0 & {\beta_2}^2 + {\beta_3}^2 \\
\end{bmatrix}
\tag{5.5}\\
\end{align}
次に、計測座標系で計算した$\boldsymbol \Sigma_{c,t}$ と$\boldsymbol \Sigma_{c,t'}$を世界座標系に変換する。
変換には以下の回転行列を用いる。
\begin{align}
\boldsymbol{R}_{c,t}
=
\begin{bmatrix}
c & -s & 0 \\
s & c & 0 \\
0 & 0 & 1 \\
\end{bmatrix}
\tag{5.6}\\
\end{align}
但し、
\begin{align}
c = cos(\theta_t + \varphi_t) \tag{5.7}\\
s = sin(\theta_t + \varphi_t) \tag{5.8}\\
\end{align}
である。
※参考文献の"graph-based SLAMの解説6"の式$(10)$と"s"の符号が異なっている。私は半時計回りの方向を正としているが、参考文献は時計回りの方向を正としたのだろうか?
最終的に世界座標系における、共分散行列$\boldsymbol \Sigma_{c,t,t'}$と情報行列$\boldsymbol \Omega_{c,t,t'}$は以下となる。
\begin{align}
\boldsymbol{\Sigma}_{c,t,t'} &= \boldsymbol{R}_{c,t}\,\boldsymbol{\Sigma}_{c,t}\,\boldsymbol{R}_{c,t}^T
+ \boldsymbol{R}_{c,t'}\,\boldsymbol{\Sigma}_{c,t'}\,\boldsymbol{R}_{c,t'}^T \tag{5.9}\\
\boldsymbol{\Omega}_{c,t,t'} &= \boldsymbol{\Sigma}_{c,t,t'}^{-1} \tag{5.10}\\
\end{align}
5.3 最適化の手法
いよいよ本題の肝となる最適化問題である。まず、ロボットが各時刻に得られた観測結果のエッジ2つ1組のペアを全通り作成する。この全ペアの集合を$\mathcal{C}$とし、2乗誤差の和を求める評価関数を定義する。
\begin{align}
\boldsymbol{F}(\boldsymbol{x}) = \displaystyle \sum_{ \boldsymbol{e}_{c,t,t'}
\in \mathcal{C} }^{ } \ \underbrace{\boldsymbol{e}_{c,t,t'}^T \, \boldsymbol{\Omega}_{c,t,t'} \, \boldsymbol{e}_{c,t,t'}}_{\boldsymbol{F}_{t,t'}} \tag{5.11}\\
\end{align}
この上式の$\boldsymbol{F}(\boldsymbol{x})$が最小となる$\hat{\boldsymbol{x}}$を求めることが最終的な目的である。
最小値$\hat{\boldsymbol{x}}$を求めるアプローチ方法としてはGauss-Newton法やLevenberg-Marquardt法を用いるのが一般的とのこと。
Gauss-Newton法やLevenberg-Marquardt法については以下のサイトが参考になると思いますので、興味あったら覗いてみてください。
今回は"A Tutorial on Graph-based SLAM5"と同じようにGauss-Newton法で解いていきます。
まず始めに、$\boldsymbol F_{c,t,t'}$と$\boldsymbol x_{t'}$をそれぞれ、$\Delta\boldsymbol x_{t}$、$\Delta\boldsymbol x_{t'}$変化させた場合を考える。
式で表すと、
\begin{align}
\boldsymbol{e}_{c}(\boldsymbol{x}_{t} + \Delta\boldsymbol{x}_{t},\,\boldsymbol{x}_{t'} + \Delta\boldsymbol{x}_{t'})
\ &=\ \boldsymbol{e}_{c}(\boldsymbol{x}_{t,t'}+\Delta\boldsymbol{x}) \tag{5.12}\\
\ &\simeq\ \boldsymbol{e}_{c,t,t'} +
\left.\frac{\partial \boldsymbol{e}_{c,t,t'}}
{\partial \boldsymbol{x}}
\right|_{\boldsymbol{x}=\boldsymbol{x}_{t,t'}}\Delta\boldsymbol{x}
\tag{5.13}
\end{align}
と表される。但し、ヤコビ行列は$\boldsymbol{J}_c$を使って
\boldsymbol{J}_{c,t,t'} = \left.\frac{\partial \boldsymbol{e}_{c,t,t'}}{\partial\boldsymbol{x}}\right|_{\boldsymbol{x}=\boldsymbol{x}_{t,t'}} \tag{5.14}
と表される。よって、
\begin{align}
\boldsymbol{F}(\boldsymbol{x}+\Delta\boldsymbol{x}) &= \sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \boldsymbol{F}(\boldsymbol{x}_{t,t'}+\Delta\boldsymbol{x}) \tag{5.15}\\
&\simeq \sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \
(\boldsymbol{e}_{c,t,t'} + \boldsymbol{J}_{c,t,t'}\Delta{\boldsymbol{x}} )^T
\, \boldsymbol{\Omega}_{c,t,t'} \,
(\boldsymbol{e}_{c,t,t'} + \boldsymbol{J}_{c,t,t'}\Delta{\boldsymbol{x}} ) \tag{5.16}\\
&= \sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \
\underbrace{\boldsymbol{e}_{c,t,t'}^T \boldsymbol{\Omega}_{c,t,t'} \boldsymbol{e}_{c,t,t'}}_{c_{c,t,t'}}
+ 2 \, \underbrace{\boldsymbol{e}_{c,t,t'}^T \boldsymbol{\Omega}_{c,t,t'} \boldsymbol{J}_{c,t,t'}}_{\boldsymbol{b}_{c,t,t'}} \Delta{\boldsymbol{x}} + \Delta{\boldsymbol{x}}^T \underbrace{\boldsymbol{J}_{c,t,t'}^T \boldsymbol{\Omega}_{c,t,t'} \boldsymbol{J}_{c,t,t'}}_{\boldsymbol{H}_{c,t,t'}}\Delta{\boldsymbol{x}} \tag{5.17}\\
&= \sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \
c_{c,t,t'} + 2 \, \boldsymbol{b}_{c,t,t'} \Delta{\boldsymbol{x}}
+ \Delta{\boldsymbol{x}}^T \boldsymbol{H}_{c,t,t'}\Delta{\boldsymbol{x}} \tag{5.18}\\
&= \underbrace{\sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } c_{c,t,t'}}_{\boldsymbol{c}}
+ 2 \underbrace{\left(\sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \, \boldsymbol{b}_{c,t,t'} \right)}_{\boldsymbol{b}} \Delta{\boldsymbol{x}}
+ \Delta{\boldsymbol{x}}^T \underbrace{\left( \sum_{ \boldsymbol{e}_{c,t,t'} \in \mathcal{C} } \boldsymbol{H}_{c,t,t'} \right)}_{\boldsymbol{H}} \Delta{\boldsymbol{x}} \tag{5.19}\\
&= \boldsymbol{c}
+ 2 \boldsymbol{b} \Delta{\boldsymbol{x}}
+ \Delta{\boldsymbol{x}}^T \boldsymbol{H} \Delta{\boldsymbol{x}} \tag{5.20}\\
\end{align}
式$(5.20)$の$\boldsymbol{c}$は定数となる。さらに、式$(5.20)$の変曲点を計算すると、
\begin{align}
2 \boldsymbol{b} + 2 \boldsymbol{H} \Delta{\boldsymbol{x}} = 0 \tag{5.21}\\
\end{align}
よって、$\Delta \boldsymbol{x}$は
\begin{align}
\Delta{\boldsymbol{x}} = -\boldsymbol{H}^{-1} \boldsymbol{b} \tag{5.22}\\
\end{align}
となる。
計算された$\Delta \boldsymbol{x}$を使って$\boldsymbol{x}$を更新する。
\begin{align}
\boldsymbol{x} \leftarrow \boldsymbol{x}+\Delta \boldsymbol{x} \tag{5.23}\\
\end{align}
更新した$\boldsymbol{x}$を使って式$(5.11)$の$\boldsymbol{F}(\boldsymbol{x})$を計算し、計算結果が十分小さくなるまで式$(5.12)$からの計算を繰り返す。
計算結果が十分小さいときの$\boldsymbol{x}$を最適解$\hat{\boldsymbol{x}}$とする。
6 実装
Graph-Based SLAMをPythonで実装してみました。
スクリプトはGitHubで公開しています。
・GitHub - graph_based_slam.py
スクリプトを実行した結果は以下のようになります。
(画像をクリックするとYouTubeへジャンプします。)
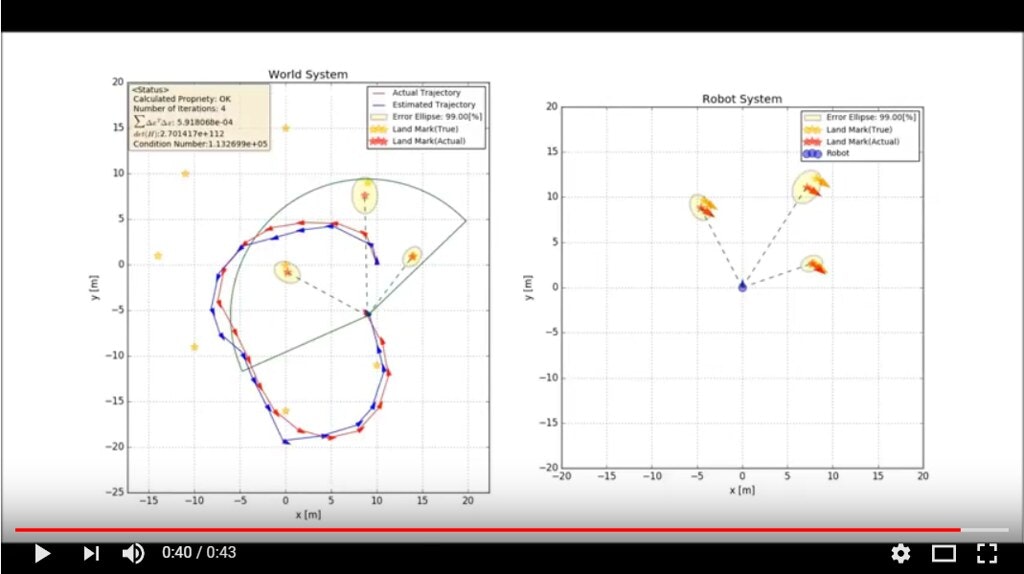
※詳しい説明は後々追加していこうと思います。
7 さいごに
最近流行のGraph-Based SLAMを実装してみましたが、正直実装もこの記事書くのもしんどかったです。
上手く動かないこともありましたが、なんとか意図した通りに動かすことができてよかったです。
まだまだ内容の薄い記事ですが、一旦ここで公開しようと思います。
説明不足の個所も多々あると思いますが、指摘していただければ追記していこうと思います。
また、実装するに当たり、上田さんの解説が大変参考になりました。
- "graph-based SLAMの解説6"
次は実機でSLAMを動かしていきたいと思います♪