動作環境
GeForce GTX 1070 (8GB)
ASRock Z170M Pro4S [Intel Z170chipset]
Ubuntu 16.04 LTS desktop amd64
TensorFlow v1.1.0
cuDNN v5.1 for Linux
CUDA v8.0
Python 3.5.2
IPython 6.0.0 -- An enhanced Interactive Python.
gcc (Ubuntu 5.4.0-6ubuntu1~16.04.4) 5.4.0 20160609
GNU bash, version 4.3.48(1)-release (x86_64-pc-linux-gnu)
学習コードv0.1 http://qiita.com/7of9/items/5819f36e78cc4290614e
http://qiita.com/7of9/items/ba8197ac83619c3cc749
の続き。
変更点
- 学習コード v0.4
- ステップを90,000から270,000に増やしてみた
- 結果確認コード v0.3
- TARGET_IDX.EXRなどのインデックス間違い修正
- 対象とするZ, mr, mi条件確認のif文の間違い修正
- 付随して、処理時間が4分から20秒に改善した
- plt.imshow()にvmin, vmaxをつけてみた
- カラーバーの表示範囲の統一
学習コードv0.4
learn_mr_mi_170722.py
import numpy as np
import tensorflow as tf
import tensorflow.contrib.slim as slim
"""
v0.4 Jul. 23, 2017
- increase step from [90000] to [270000]
v0.3 Jul. 22, 2017
- output model variables
v0.2 Jul. 22, 2017
- increase step from [30000] to [90000]
- change [capacity]
v0.1 Jul. 22, 2017
- increase network structure from [7,7,7] to [100,100,100]
- increase dimension of [input_ph], [output_ph]
- alter read_and_decode() to treat 5 input-, 6 output- nodes
- alter [IN_FILE] to the symbolic linked file
:reference: [learnExr_170504.py] to expand dimensions to [input:3,output:6]
=== branched from [learn_sineCurve_170708.py] ===
v0.6 Jul. 09, 2017
- modify for PEP8
- print prediction after learning
v0.5 Jul. 09, 2017
- fix bug > [Attempting to use uninitialized value hidden/hidden_1/weights]
v0.4 Jul. 09, 2017
- fix bug > stops only for one epoch
+ set [num_epochs=None] for string_input_producer()
- change parameters for shuffle_batch()
- implement training
v0.3 Jul. 09, 2017
- fix warning > use tf.local_variables_initializer() instead of
initialize_local_variables()
- fix warning > use tf.global_variables_initializer() instead of
initialize_all_variables()
v0.2 Jul. 08, 2017
- fix bug > OutOfRangeError (current size 0)
+ use [tf.initialize_local_variables()]
v0.1 Jul. 08, 2017
- only read [.tfrecords]
+ add inputs_xy()
+ add read_and_decode()
"""
# codingrule: PEP8
IN_FILE = 'LN-IntField-Y_170722.tfrecords'
def read_and_decode(filename_queue):
reader = tf.TFRecordReader()
_, serialized_example = reader.read(filename_queue)
features = tf.parse_single_example(
serialized_example,
features={
'xpos_raw': tf.FixedLenFeature([], tf.string),
'ypos_raw': tf.FixedLenFeature([], tf.string),
'zpos_raw': tf.FixedLenFeature([], tf.string),
'mr_raw': tf.FixedLenFeature([], tf.string),
'mi_raw': tf.FixedLenFeature([], tf.string),
'exr_raw': tf.FixedLenFeature([], tf.string),
'exi_raw': tf.FixedLenFeature([], tf.string),
'eyr_raw': tf.FixedLenFeature([], tf.string),
'eyi_raw': tf.FixedLenFeature([], tf.string),
'ezr_raw': tf.FixedLenFeature([], tf.string),
'ezi_raw': tf.FixedLenFeature([], tf.string),
})
xpos_raw = tf.decode_raw(features['xpos_raw'], tf.float32)
ypos_raw = tf.decode_raw(features['ypos_raw'], tf.float32)
zpos_raw = tf.decode_raw(features['zpos_raw'], tf.float32)
mr_raw = tf.decode_raw(features['mr_raw'], tf.float32)
mi_raw = tf.decode_raw(features['mi_raw'], tf.float32)
exr_raw = tf.decode_raw(features['exr_raw'], tf.float32)
exi_raw = tf.decode_raw(features['exi_raw'], tf.float32)
eyr_raw = tf.decode_raw(features['eyr_raw'], tf.float32)
eyi_raw = tf.decode_raw(features['eyi_raw'], tf.float32)
ezr_raw = tf.decode_raw(features['ezr_raw'], tf.float32)
ezi_raw = tf.decode_raw(features['ezi_raw'], tf.float32)
xpos_org = tf.reshape(xpos_raw, [1])
ypos_org = tf.reshape(ypos_raw, [1])
zpos_org = tf.reshape(zpos_raw, [1])
mr_org = tf.reshape(mr_raw, [1])
mi_org = tf.reshape(mi_raw, [1])
exr_org = tf.reshape(exr_raw, [1])
exi_org = tf.reshape(exi_raw, [1])
eyr_org = tf.reshape(eyr_raw, [1])
eyi_org = tf.reshape(eyi_raw, [1])
ezr_org = tf.reshape(ezr_raw, [1])
ezi_org = tf.reshape(ezi_raw, [1])
# input
wrk = [xpos_org[0], ypos_org[0], zpos_org[0], mr_org[0], mi_org[0]]
inputs = tf.stack(wrk)
# output
wrk = [exr_org[0], exi_org[0],
eyr_org[0], eyi_org[0],
ezr_org[0], ezi_org[0]]
outputs = tf.stack(wrk)
return inputs, outputs
def inputs_xy():
filename = IN_FILE
filequeue = tf.train.string_input_producer(
[filename], num_epochs=None)
in_org, out_org = read_and_decode(filequeue)
return in_org, out_org
in_orgs, out_orgs = inputs_xy()
batch_size = 4 # [4]
# Ref: cifar10_input.py
min_fraction_of_examples_in_queue = 0.2 # 0.4
NUM_EXAMPLES_PER_EPOCH_FOR_TRAIN = 223872 # 223872 or 9328
min_queue_examples = int(NUM_EXAMPLES_PER_EPOCH_FOR_TRAIN *
min_fraction_of_examples_in_queue)
cpcty = min_queue_examples + 3 * batch_size
in_batch, out_batch = tf.train.shuffle_batch([in_orgs, out_orgs],
batch_size,
capacity=cpcty,
min_after_dequeue=batch_size)
input_ph = tf.placeholder("float", [None, 5])
output_ph = tf.placeholder("float", [None, 6]) # [6]
# network
hiddens = slim.stack(input_ph, slim.fully_connected, [100, 100, 100],
activation_fn=tf.nn.sigmoid, scope="hidden")
prediction = slim.fully_connected(hiddens, 6,
activation_fn=None, scope="output")
loss = tf.contrib.losses.mean_squared_error(prediction, output_ph)
train_op = slim.learning.create_train_op(loss, tf.train.AdamOptimizer(0.001))
init_op = [tf.global_variables_initializer(), tf.local_variables_initializer()]
with tf.Session() as sess:
sess.run(init_op)
coord = tf.train.Coordinator()
threads = tf.train.start_queue_runners(sess=sess, coord=coord)
try:
for idx in range(270000): # 90000
inpbt, outbt = sess.run([in_batch, out_batch])
_, t_loss = sess.run([train_op, loss],
feed_dict={input_ph: inpbt, output_ph: outbt})
if (idx + 1) % 100 == 0:
print("%d,%f" % (idx+1, t_loss))
finally:
coord.request_stop()
# output the model
model_variables = slim.get_model_variables()
res = sess.run(model_variables)
np.save('model_variables_170722.npy', res)
coord.join(threads)
結果確認コード v0.3
show_original_170722.ipynb
import numpy as np
import tensorflow as tf
import math
import sys
import matplotlib.pyplot as plt
import matplotlib.cm as cm
import datetime
"""
v0.3 Jul. 23, 2017
- add [COLOR_RANGE] and (vmin, vmax) for plt.imshow()
- fix bug > if abs() statement is the other way around
- fix bug > TARGET_IDX.EXR..EXI is wrong
v0.2 Jul. 22, 2017
- update calc_conv()
v0.1 Jul. 22, 2017
- change for input incuding [mr],[mi]
=== branched from [display_TFRecords_IntField_170709.ipynb: v0.1] ===
"""
# on
# Ubuntu 16.04 LTS
# TensorFlow v1.1
# Python 3.5.2
# IPython 6.0.0 -- An enhanced Interactive Python.
def calc_sigmoid(x):
return 1.0 / (1.0 + math.exp(-x))
def calc_conv(src, weight, bias, applyActFnc):
wgt = weight.shape
# print wgt # debug
#conv = list(range(bias.size))
conv = [0.0] * bias.size
# weight
#for idx1 in range(wgt[0]):
# for idx2 in range(wgt[1]):
# conv[idx2] = conv[idx2] + src[idx1] * weight[idx1, idx2]
for idx2 in range(wgt[1]):
tmp_vec = weight[:,idx2] * src[:]
conv[idx2] = tmp_vec.sum()
# bias
for idx2 in range(wgt[1]):
conv[idx2] = conv[idx2] + bias[idx2]
# activation function
if applyActFnc:
for idx2 in range(wgt[1]):
conv[idx2] = calc_sigmoid(conv[idx2])
return conv # return list
def get_feature_float32(example, feature_name):
wrk_raw = (example.features.feature[feature_name]
.bytes_list
.value[0])
wrk_1d = np.fromstring(wrk_raw, dtype=np.float32)
wrk_org = wrk_1d.reshape([1, -1])
return wrk_org
def get_group_features(example):
xpos_org = get_feature_float32(example, 'xpos_raw')
ypos_org = get_feature_float32(example, 'ypos_raw')
zpos_org = get_feature_float32(example, 'zpos_raw')
mr_org = get_feature_float32(example, 'mr_raw')
mi_org = get_feature_float32(example, 'mi_raw')
exr_org = get_feature_float32(example, 'exr_raw')
exi_org = get_feature_float32(example, 'exi_raw')
eyr_org = get_feature_float32(example, 'eyr_raw')
eyi_org = get_feature_float32(example, 'eyi_raw')
ezr_org = get_feature_float32(example, 'ezr_raw')
ezi_org = get_feature_float32(example, 'ezi_raw')
pos = xpos_org[0], ypos_org[0], zpos_org[0], mr_org[0], mi_org[0]
ex = exr_org[0], exi_org[0]
ey = eyr_org[0], eyi_org[0]
ez = ezr_org[0], ezi_org[0]
return pos + ex + ey + ez
class TARGET_IDX:
EXR, EXI = 5, 6 # real and imaginary part of Ex
EYR, EYI = 7, 8
EZR, EZI = 9, 10
# parameters
SIZE_MAP_X = 30 # size of the image
SIZE_MAP_Y = 30
ZOOM_X = 15.0 #
ZOOM_Y = 15.0
SHIFT_X = 15.0 # to shift the center position
SHIFT_Y = 15.0
orgmap = [[0.0 for yi in range(SIZE_MAP_Y)] for xi in range(SIZE_MAP_X)]
outmap = [[0.0 for yi in range(SIZE_MAP_Y)] for xi in range(SIZE_MAP_X)]
INP_FILE = 'LN-IntField-Y_170722.tfrecords'
NETWORK_FILE = 'model_variables_170722.npy'
pickUpZvalue = 0.23621 # arbitrary selected
pickUpRealm = 1.33 # 1.45 # arbitrary selected
pickUpImagm = 0.0001 # arbitrary selected
print(datetime.datetime.now())
atargetIdx = TARGET_IDX.EXR # [set this]
model_var = np.load(NETWORK_FILE)
record_iterator = tf.python_io.tf_record_iterator(path=INP_FILE)
for record in record_iterator:
example = tf.train.Example()
example.ParseFromString(record)
tpl = get_group_features(example)
xpos_val, ypos_val, zpos_val = tpl[0:3]
mr_val, mi_val = tpl[3:5]
ax, ay, az = *xpos_val, *ypos_val, *zpos_val
amr, ami = *mr_val, *mi_val
aTarget = tpl[atargetIdx]
if (abs(az - pickUpZvalue) > 1e-7 or
abs(amr - pickUpRealm) > 1e-7 or
abs(ami - pickUpImagm) > 1e-7):
continue
xidx = (SIZE_MAP_X * ax / ZOOM_X + SHIFT_X).astype(int)
yidx = (SIZE_MAP_Y * ay / ZOOM_Y + SHIFT_Y).astype(int)
if (xidx < 0 or xidx >= SIZE_MAP_X or
yidx < 0 or yidx >= SIZE_MAP_Y):
continue
# input layer (5 nodes)
inlist = (ax, ay, az, amr, ami)
# hidden layer 1
outdata = calc_conv(inlist, model_var[0], model_var[1], applyActFnc=True)
# hidden layer 2
outdata = calc_conv(outdata, model_var[2], model_var[3], applyActFnc=True)
# hidden layer 3
outdata = calc_conv(outdata, model_var[4], model_var[5], applyActFnc=True)
# output layer
outdata = calc_conv(outdata, model_var[6], model_var[7], applyActFnc=False)
orgmap[xidx][yidx] = aTarget # overwrite
outmap[xidx][yidx] = outdata[atargetIdx - TARGET_IDX.EXR]
#outmap[xidx][yidx] = 0.0 # dummy
# draw map
COLOR_RANGE = 0.3
# original
plt.subplot(121)
figmap = np.reshape(np.array(orgmap), (SIZE_MAP_X, SIZE_MAP_Y))
plt.imshow(figmap, extent=(0, SIZE_MAP_X, 0, SIZE_MAP_Y), cmap=cm.jet, vmin=-COLOR_RANGE, vmax=COLOR_RANGE)
plt.colorbar()
# learnt
plt.subplot(122)
figmap = np.reshape(np.array(outmap), (SIZE_MAP_X, SIZE_MAP_Y))
plt.imshow(figmap, extent=(0, SIZE_MAP_X, 0, SIZE_MAP_Y), cmap=cm.jet, vmin=-COLOR_RANGE, vmax=COLOR_RANGE)
plt.colorbar()
plt.show()
print(datetime.datetime.now())
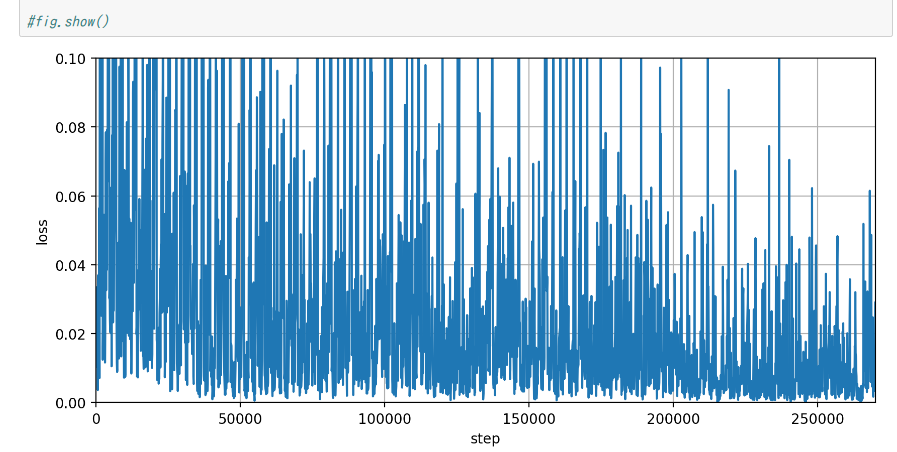
lossの減少
減少しているが0.02程度はある。
結果確認
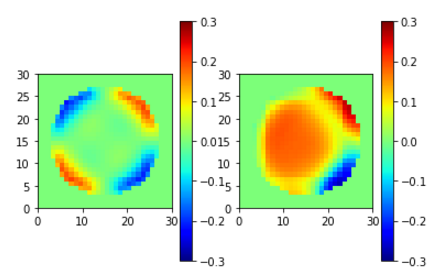
EXRの比較 (左が元, 右が学習結果)
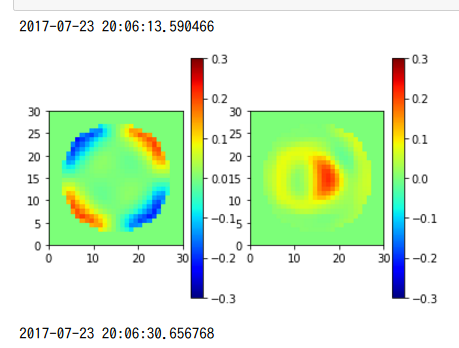
EXIの比較
他の値についても再現率は高くない。
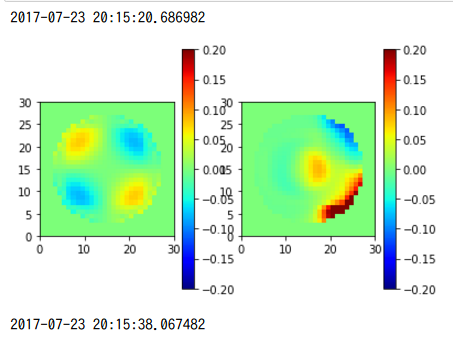
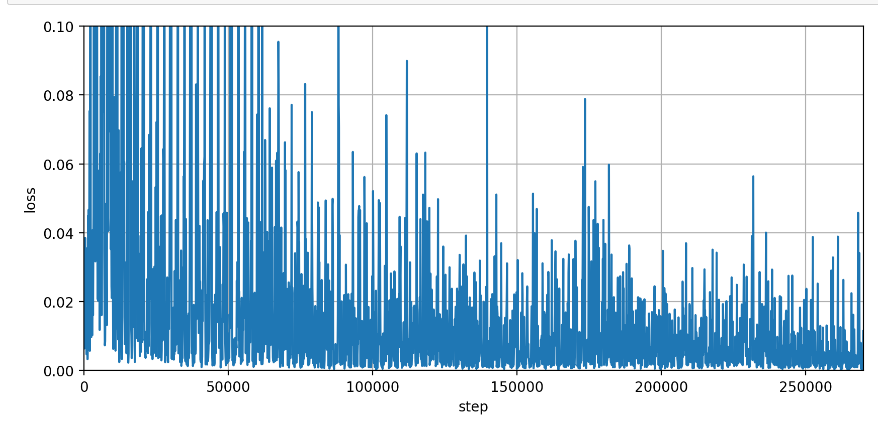
mr, mi固定
mr=1.33, mi=0.0001iのデータだけに対して学習をしてみた。
lossの減少は良くなった。
EXRの再現
EXIの再現
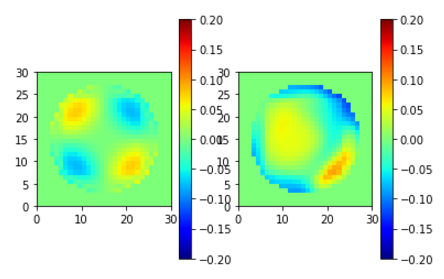
再現率はまだ悪い。