TJBot持ってないので)ダイソーで自作
本当は、はじめてNode-REDを触ったお話です。
前提:TJBotって何?
IBM Watsonを利用・学習するために段ボールロボットをDIYするためのプロジェクト
TJBotって何ができるの?
- LEDを光らせる
- カメラで画像認識
- 音声合成で話す
- 翻訳する
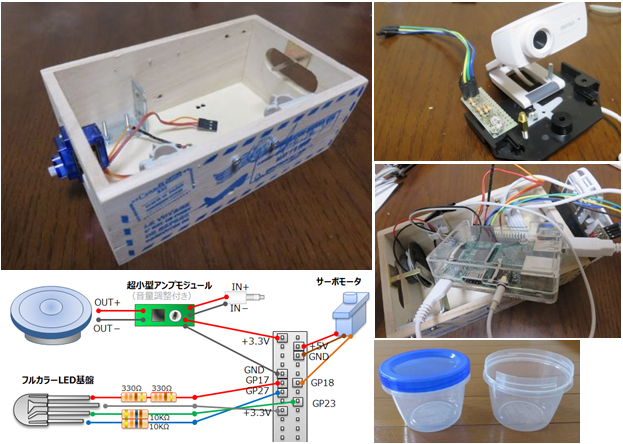
TJBotを構成する部品
| 部位 | 本物TJBot | 自作ロボット |
|---|---|---|
| 体 | 段ボール | 何かの箱とタッパー |
| 目 | カメラ | カメラ |
| 口 | スピーカー | スピーカー |
| 耳 | マイク | マイク |
| 感情 | カラーLED | カラーLED |
| 表現 | サーボモータSG90 | サーボモータSG90 |
| 知能 | ラズパイ | ラズパイ |
| 知能 | Node-RED | Node-RED(ここ大事) |
出来る事と構成部品が一緒なら言い切っちゃえ
期待してた皆さん、ごめんなさい。みため [●_●]┛ こんなんでなくて。
でも、今回のためにNode-REDを初めて追加します。

ダイソーで自作の過程はこれ↓
ダイソーで買った何かの箱とタッパー。
さて、メインのNode-REDをインストールしよう!
っと、あちこちググってみたところ、ラズパイにデフォルトでインストールされてるのね、そういえば。すげー。
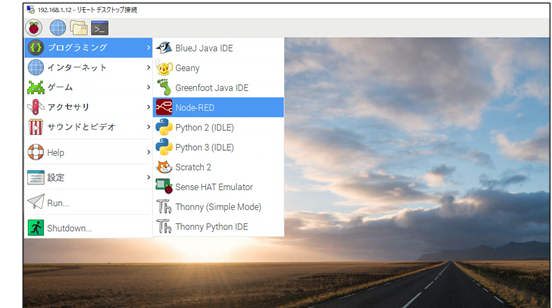
使い方は Node-RED日本ユーザ会 のチュートリアル参照
Node-RED 日本ユーザ会 > はじめてのフロー
https://nodered.jp/docs/tutorials/first-flow
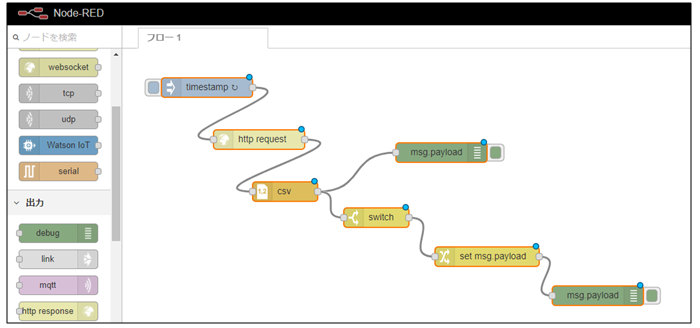
一定間隔でWEBサイトからCSVデータを取得してWEBブラウザに表示させる例。ふむふむ。およそ30分で使い方の段取りが分かった。部品(ノード)も楽しそうなのが揃っているので、色んなことができるのですね、きっと。
TJBotらしくLEDをチカチカやってみよ。
トリガーは2秒おきに、LED出力はどれだろう。出力部品(ノード)の、シリアルかなぁ、ちょっと違いそう。おおっ、ラズパイ専用の部品(ノード)があるじゃないですか。
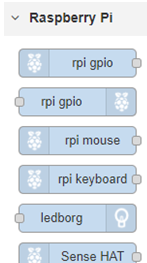
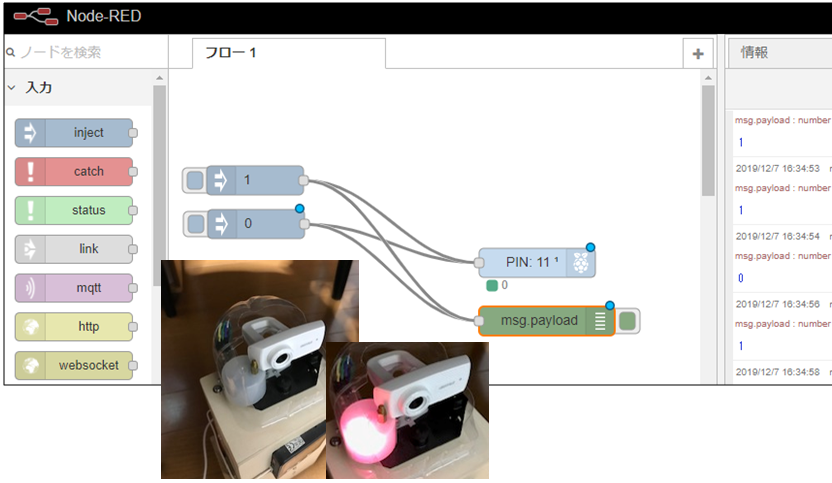
赤色LEDチカチカ
Injectトリガーはマウスでポチポチすると信号[0]か[1]が出力されて、ラズパイのGPIO番号の出力レベルを[0,1]切り替えます。点灯したよー。
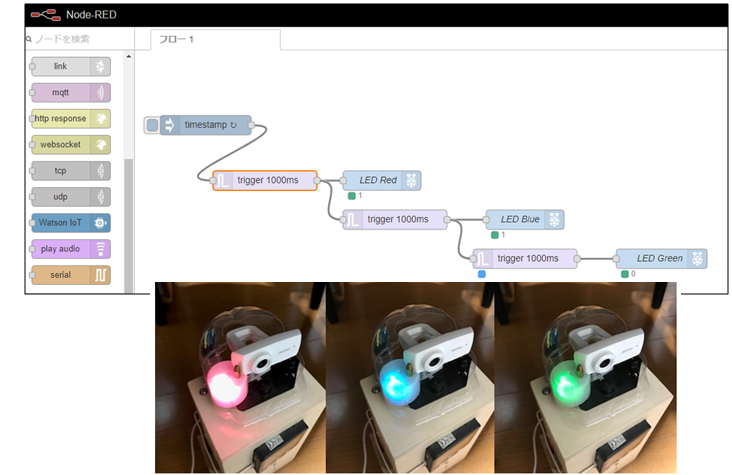
三色Lチカ
今度は 1秒おき のディレイを割り込ませて、1秒おきに赤→青→緑を点灯します。
最後に
Node-RED面白いかも。cronやらservice使わなくても、ラズパイ起動時の自動実行とかできるみたいなので使ってみようかなー。
この記事は TJBot Advent Calendar 2019 に空きがあったので急遽制作しました。