最近, 学生からローパスフィルタの質問を受けたので,簡単にまとめます.
はじめに
ローパスフィルタは,時系列データから高周波数のデータを除去する変換です.主に,ノイズの除去に使われます.
この記事では, A.移動平均法,B.周波数空間でのカットオフ,C.ガウス畳み込みとD.一次遅れ系の4つを紹介します.それぞれに特徴がありますが, 一般のデータにはガウス畳み込みを,リアルタイム処理では一次遅れ系をおすすめします.
データの準備
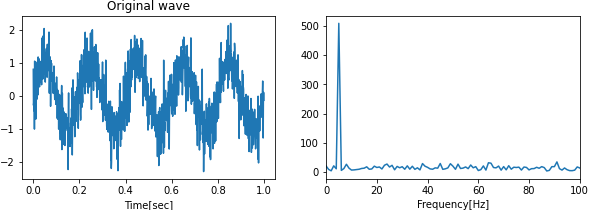
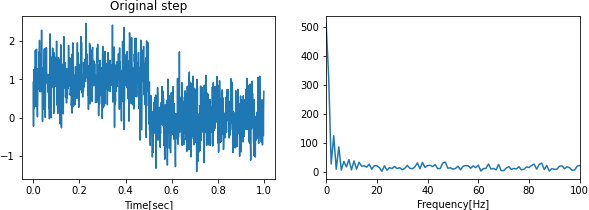
今回は,ノイズが乗ったサイン波と矩形波を用意して, ローパスフィルタの性能を確かめます.
白色雑音が乗っているため,高周波数成分の存在が確認できる.
import numpy as np
import matplotlib.pyplot as plt
dt = 0.001 #1stepの時間[sec]
times = np.arange(0,1,dt)
N = times.shape[0]
f = 5 #サイン波の周波数[Hz]
sigma = 0.5 #ノイズの分散
np.random.seed(1)
# サイン波
x_s =np.sin(2 * np.pi * times * f)
x = x_s + sigma * np.random.randn(N)
# 矩形波
y_s = np.zeros(times.shape[0])
y_s[:times.shape[0]//2] = 1
y = y_s + sigma * np.random.randn(N)
サイン波(左:時間, 右:フーリエ変換後):
矩形波(左:時間, 右:フーリエ変換後):
以下では,次の記法を用いる.
$x(t)$: ローパスフィルタ適用前の離散時系列データ
$X(\omega)$: ローパスフィルタ適用前の周波数データ
$y(t)$: ローパスフィルタ適用後の離散時系列データ
$Y(\omega)$: ローパスフィルタ適用後の周波数データ
$\Delta t$: 離散時系列データにおける,1ステップの時間[sec]
ローパスフィルタ適用前の離散時系列データを入力信号,ローパスフィルタ適用前の離散時系列データを出力信号と呼びます.
A.移動平均法
移動平均法(Moving Average Method)は近傍の$k$点を平均化した結果を出力する手法です.
$$
y(t) = \frac{1}{k}\sum_{i=0}^{k-1}x(t-i)
$$
平均化する個数$k$が大きくなると,除去する高周波帯域が広くなります.
とても簡単に設計できる反面,性能はあまり良くありません.
また,高周波大域の信号が残っている特徴があります.
以下のプログラムでのパラメータ$\tau$は,
$$
\tau = k \cdot \Delta t
$$
と,時間方向に正規化しています.
def LPF_MAM(x,times,tau = 0.01):
k = np.round(tau /(times[1] - times[0])).astype(int)
x_mean = np.zeros(x.shape)
N = x.shape[0]
for i in range(N):
if i-k//2 <0 :
x_mean[i] = x[: i - k//2 +k].mean()
elif i - k//2 +k>=N:
x_mean[i] = x[i - k//2 :].mean()
else :
x_mean[i] = x[i - k//2 : i - k//2 +k].mean()
return x_mean
#tau = 0.035(sin wave), 0.051(step)
x_MAM = LPF_MAM(x,times,tau)
移動平均法を適用したサイン波(左:時間, 右:フーリエ変換後):
![MAM wave : tau = 0.035[sec].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F4ce7cf61-967b-b58b-06cf-8a6e90905479.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=a7817dfc9a0b7d170de3cb58d6dbdcb7)
移動平均法を適用した矩形波(左:時間, 右:フーリエ変換後):
![MAM step : tau = 0.051[sec].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F7b335a37-ca8f-e30b-c4c5-5e8766d16f09.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=91dba17bea3a00a868adbe4cc88a5186)
B. 周波数空間でのカットオフ
入力信号をフーリエ変換し,あるカット値$f_{\max}$を超える周波数帯信号を除去し,逆フーリエ変換でもとに戻す手法です.
\begin{align}
Y(\omega) =
\begin{cases}
X(\omega),&\omega<= f_{\max}\\
0,&\omega > f_{\max}
\end{cases}
\end{align}
ここで,$f_{\max}$が小さくすると除去する高周波帯域が広くなります.
高速フーリエ変換とその逆変換を用いることによる計算時間の増加と,時間データの近傍点以外の影響が大きいという問題点があります.
def LPF_CF(x,times,fmax):
freq_X = np.fft.fftfreq(times.shape[0],times[1] - times[0])
X_F = np.fft.fft(x)
X_F[freq_X>fmax] = 0
X_F[freq_X<-fmax] = 0
# 虚数は削除
x_CF = np.fft.ifft(X_F).real
return x_CF
#fmax = 5(sin wave), 13(step)
x_CF = LPF_CF(x,times,fmax)
周波数空間でカットオフしたサイン波(左:時間, 右:フーリエ変換後):
![CF wave : fmax = 5[Hz].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F7c93a6ce-b085-137e-52e6-e958093c8b4e.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=53b55c2cee01dea1b320355b63ee682a)
周波数空間でカットオフした矩形波(左:時間, 右:フーリエ変換後):
![CF step : fmax = 13[Hz].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F896cfee2-ce4a-80a9-630a-9dfab49944eb.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=1b6dbd3e0de673c6b40140e147224607)
C. ガウス畳み込み
平均0, 分散$\sigma^2$のガウス関数を
$$
g_\sigma(t) = \frac{1}{\sqrt{2\pi \sigma^2}}\exp\Big(\frac{t^2}{2\sigma^2}\Big)
$$
とする.
このとき,ガウス畳込みによるローパスフィルターは以下のようになる.
$$
y(t) = (g_\sigma*x)(t) = \sum_{i=-n}^n g_\sigma(i)x(t+i)
$$
ガウス関数は分散に依存して減衰するため,以下のコードでは$n=3\sigma$としています.
分散$\sigma$が大きくすると,除去する高周波帯域が広くなります.
ガウス畳み込みによるローパスフィルターは,計算速度も遅くなく,近傍のデータのみで高周波信号をきれいに除去するため,おすすめです.
def LPF_GC(x,times,sigma):
sigma_k = sigma/(times[1]-times[0])
kernel = np.zeros(int(round(3*sigma_k))*2+1)
for i in range(kernel.shape[0]):
kernel[i] = 1.0/np.sqrt(2*np.pi)/sigma_k * np.exp((i - round(3*sigma_k))**2/(- 2*sigma_k**2))
kernel = kernel / kernel.sum()
x_long = np.zeros(x.shape[0] + kernel.shape[0])
x_long[kernel.shape[0]//2 :-kernel.shape[0]//2] = x
x_long[:kernel.shape[0]//2 ] = x[0]
x_long[-kernel.shape[0]//2 :] = x[-1]
x_GC = np.convolve(x_long,kernel,'same')
return x_GC[kernel.shape[0]//2 :-kernel.shape[0]//2]
#sigma = 0.011(sin wave), 0.018(step)
x_GC = LPF_GC(x,times,sigma)
ガウス畳み込みを行ったサイン波(左:時間, 右:フーリエ変換後):
![GC wave : sigma = 0.011[sec].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F3c7fca83-81b1-7b21-a972-57c87db84b1f.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=6ab607ef791702084e93a362b26f481c)
ガウス畳み込みを行った矩形波(左:時間, 右:フーリエ変換後):
![GC step : sigma = 0.018[sec].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2Facf64332-2a16-6e80-4129-6dd92b75b84d.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=b7b441a0da91b1e2a7004b76d66c9638)
D. 一次遅れ系
一次遅れ系を用いたローパスフィルターは,リアルタイム処理を行うときに用いられています.
古典制御理論等で用いられています.
$f_0$をカットオフする周波数基準とすると,以下の離散方程式によって,ローパスフィルターが適用されます.
$$
y(t+1) = \Big(1 - \frac{\Delta t}{f_0}\Big)y(t) + \frac{\Delta t}{f_0}x(t)
$$
ここで,$f_{\max}$が小さくすると,除去する高周波帯域が広くなります.
リアルタイム性が強みですが,あまり性能がいいとは言えません.以下のコードはデータを一括に処理する関数となっていますが,実際にリアルタイムで利用する際は,上記の離散方程式をシステムに組み込んでください.
def LPF_FO(x,times,f_FO=10):
x_FO = np.zeros(x.shape[0])
x_FO[0] = x[0]
dt = times[1] -times[0]
for i in range(times.shape[0]-1):
x_FO[i+1] = (1- dt*f_FO) *x_FO[i] + dt*f_FO* x[i]
return x_FO
#f0 = 0.011(sin wave), 0.018(step)
x_FO = LPF_FO(x,times,fO)
一次遅れ系によるローパスフィルター後のサイン波(左:時間, 右:フーリエ変換後):
![FO wave : f_FO = 187[Hz].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F4ed1f6e2-4cbf-83be-c7fe-60ae20d4ac0d.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=5cb6f3f7275a3f1c876faf266479b314)
一次遅れ系によるローパスフィルター後の矩形波(左:時間, 右:フーリエ変換後):
![FO step : f_FO = 74[Hz].png](https://qiita-user-contents.imgix.net/https%3A%2F%2Fqiita-image-store.s3.ap-northeast-1.amazonaws.com%2F0%2F245708%2F708e0696-593f-63c5-b4dc-82a82c198221.png?ixlib=rb-4.0.0&auto=format&gif-q=60&q=75&s=7af27ea256c3b5ddd262067856aac5a3)
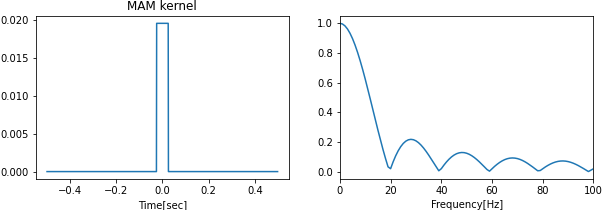
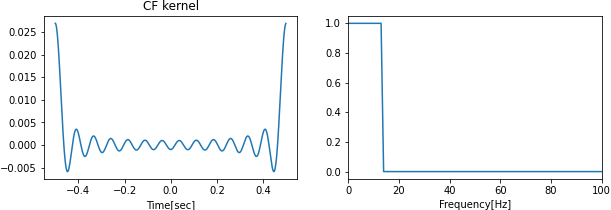
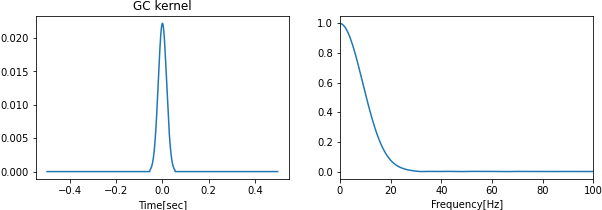
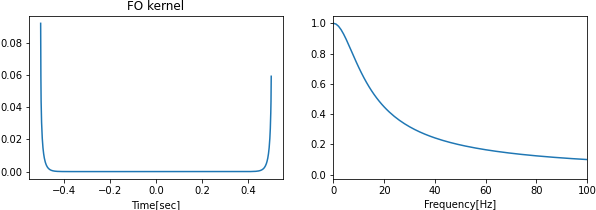
Appendix: 畳み込み変換と周波数特性
上記で紹介した4つの手法は,畳み込み演算として表現できます.(ガウス畳み込みは顕著)
畳み込みに用いる関数系と,そのフーリエ変換によって,ローパスフィルターの特徴が出てきます.
移動平均法の関数(左:時間, 右:フーリエ変換後):
周波数空間でのカットオフの関数(左:時間, 右:フーリエ変換後):
ガウス畳み込みの関数(左:時間, 右:フーリエ変換後):
一時遅れ系の関数(左:時間, 右:フーリエ変換後):
##まとめ
この記事では,4つのローパスフィルターの手法を紹介しました.「はじめに」に書きましたが,基本的にはガウス畳み込みを,リアルタイム処理では一次遅れ系をおすすめします.
##Code
##Author
Yuji Okamoto : yuji.0001[at]gmailcom
##Reference
フーリエ変換と畳込み:
矢野健太郎, 石原繁, 応用解析, 裳華房 1996.
一次遅れ系:
足立修一, MATLABによる制御工学, 東京電機大学出版局 1999.