はじめに
前回の投稿で、Free FleetとOpen-RMFを使ってLoopタスクを実行しました。
今回は、下の図にあるように種類の違うFleetを接続してブラウザからOpen-RMFタスクの指示を出してみます。
追加するロボットは、手持ちで簡単に構築できるロボット(以下、AMR)を選びました。 AMRはMelodicで動作するため、Dockerを使った環境を追加します(青色の箇所が前回との差分になります)。

動作確認(できるかぎり作らない)が目的なので、このような構成になっています。
環境
・OS : Ubuntu20.04
・ROS Version : ROS → Noetc / Melodic, ROS 2 → Foxy
環境構築
環境構築のポイントは以下の4つです。
- MelodicとNoeticの通信
- 複数ロボットのGazebo環境構築(Melodic側)
- Free Fleet Clientの複数対応(Noetic側)
- Web設定
Docker環境については本題ではないので、後述する「付録」に載せておきます。
MelodicとNoeticの通信
Melodicのroscoreを指定すれば良いので、Noetic側の環境変数を以下のように設定します。
IPアドレスですが、'ifconfig'して、'docker0'のinetの値を入れました。
export ROS_MASTER_URL=http://172.17.0.1:11311
Melodic側のROSプログラム(roscore)を最初に起動して、上記の環境変数が設定された状態でNoeticのROSプログラムを実行するだけです。
ハマりポイント
MelodicからNoeticの通信はできているのですが、Open-RMFのBattery値が更新されません。
Logを見るとMelodicからのBatteryトピック受信でハッシュ値が違うとROSトピック通信のログメッセージが出ています。
同じ構造体名であり、送受信でデータ構造が違うときに、このメッセージが出ます。
ROSの共通メッセージは、変わらないものだと思い込んでいましたが、
調べるとやっぱり、NoeticのBattery構造体に「temperature」メンバーが追加され、Melodicと構造が違います。
対策としてはデータ構造を合わせます。具体的には、sendor_msgsパッケージのnoetic-develブランチをMelodic側のcatkin_ws/srcに取得してcatkin_makeしました。
複数ロボットのGazebo環境構築(Melodic側)
MelodicのTurtelbot3は、何も修正することなく動きます。
launchファイルは、Free Fleetサンプルにあるmulti_turtelbot3_ff.launchを修正したものを使いました。修正といっても、上記URLファイルの63行目以降をコメントアウト(削除)するだけです。
また、AMRのGazeboモデル・Spawn情報を上記ファイルに追加しました(詳細は省略)。
Free Fleet Clientの複数対応(Noetic側)
Free Fleet Server/ClientをTurtelbot3用とAMR用のそれぞれ用意します。
Turtelbot3の設定はそのまま使うので、AMRの情報を追加します。
ポイントとしては、AMRとOpen-RMFのDDS DomainをTurtelbot3と重ならない値(43)にしました。
launchファイルは、Free Fleetのサンプルにあるmulti_turtelbot3_ff.launchを修正したものを使いました。
今度は、Melodic側のlaunchファイルとは逆で、62行目までをコメントアウト(削除)したものを使います。
追加するAMRも上記を参考にしてmulti_turtelbot3_ff.launchに追加します。
<arg name="atmobi_0_prefix" value="atmobi_0"/>
<node name="$(arg atmobi_0_prefix)_free_fleet_client_node"
pkg="free_fleet_client_ros1"
type="free_fleet_client_ros1" output="screen">
<param name="fleet_name" type="string" value="atmobi"/>
<param name="robot_name" type="string" value="$(arg atmobi_0_prefix)"/>
<param name="level_name" type="string" value="L1"/>
<param name="dds_domain" type="int" value="43"/>
<param name="robot_model" type="string" value="whill"/>
<param name="max_dist_to_first_waypoint" type="double" value="10.0"/>
<param name="battery_state_topic" value="/battery_state"/>
<param name="robot_frame" value="base_link"/>
<param name="move_base_server_name" value="/atmobi_pkg/move_base"/>
</node>
Free Fleet Serverの複数対応(Foxy側)
Server側の設定を前述のClientの情報に合わせてAMR情報を追加します。
https://github.com/open-rmf/free_fleet/blob/main/ff_examples_ros2/launch/turtlebot3_world_ff_server.launch.xml
<node pkg="free_fleet_server_ros2"
exec="free_fleet_server_ros2"
name="atmobi_fleet_server_node"
output="both">
<param name="fleet_name" value="atmobi"/>
<param name="fleet_state_topic" value="fleet_states"/>
<param name="mode_request_topic" value="robot_mode_requests"/>
<param name="path_request_topic" value="robot_path_requests"/>
<param name="destination_request_topic" value="robot_destination_requests"/>
<param name="dds_domain" value="43"/>
<param name="dds_robot_state_topic" value="robot_state"/>
<param name="dds_mode_request_topic" value="mode_request"/>
<param name="dds_path_request_topic" value="path_request"/>
<param name="dds_destination_request_topic" value="destination_request"/>
<param name="update_state_frequency" value="20.0"/>
<param name="publish_state_frequency" value="2.0"/>
<param name="translation_x" value="-10.0"/>
<param name="translation_y" value="9.1"/>
<param name="rotation" value="0.0"/>
<param name="scale" value="1.0"/>
</node>
Web設定
WebアプリはOpen-RMF Demoパッケージのものを使います。
タスクの開始・終了地点は、Traffic Editorで作ったものに変更します。
そこで、下記URLのJsonファイルを参考に、"Loop"→"places"の値を変更してJsonファイルを作ります。
"Delivery"タスクは、使わないので削除しました。
作成したJsonファイルはOpen-RMFのlaunchファイルで指定します。
具体的には、以下のファイルの11行目です。
https://github.com/open-rmf/rmf_demos/blob/main/rmf_demos/launch/office.launch.xml
実際に起動するファイルは、前回作成したhouse.launchです。(前回の投稿参照)
実行
以下を順番に実行します。
cd /root/catkin_ws
source ./devel/setup.bash
roslaunch ff_example_ros1 multi_turtelbot3_ff.launch
export ROS_MASTER_URI=http://172.17.0.1:11311
cd ~/Work/open-rmf/free_fleet/ros1
source install/setup.bash
roslaunch ff_examples_ros1 multi_turtelbot3_ff.launch
export ROS_MASTER_URI=http://172.17.0.1:11311
cd ~/Work/open-rmf/free_fleet/ros2
source install/setup.bash
ros2 launch my_sample turtelbot3_world_ff_server.launch.xml
export ROS_MASTER_URI=http://172.17.0.1:11311
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
cd ~/Work/open-rmf/free_fleet/ros1_bridge_ws
source install/local_setup.bash
ros2 run ros1_bridge dynamic_bridge
export ROS_MASTER_URI=http://172.17.0.1:11311
source /opt/ros/foxy/setup.bash
cd ~/Work/open-rmf/free_fleet/ros2
source install/setup.bash
ros2 launch rmf_demos house.launch.xml
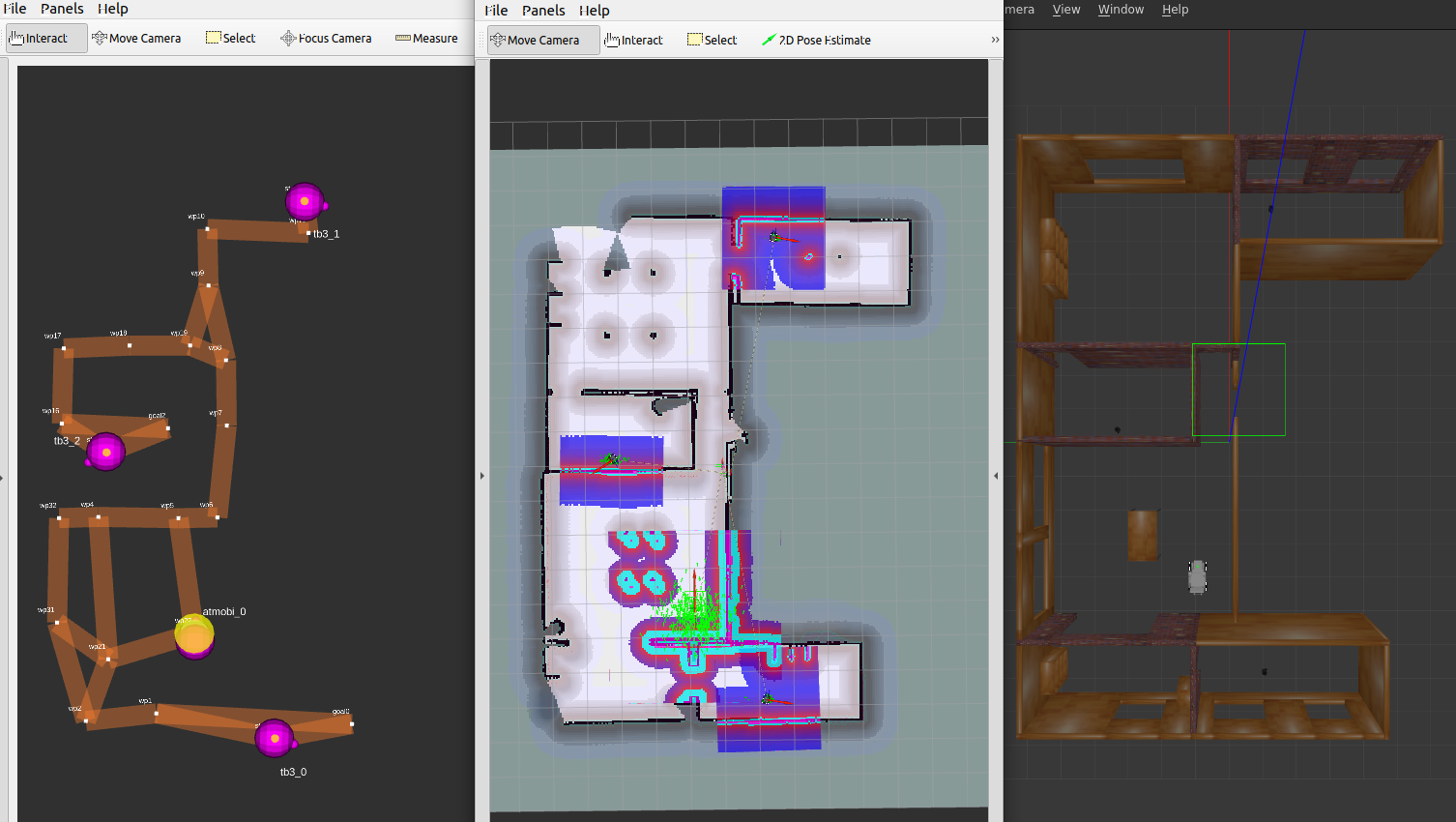
ここまで実行すると下の図のようになります。
左側から「Open-RMFの経路情報」・「ロボット情報(Rviz)」・「Gazebo画面」です。
追加されたAMRも画面に出ています。
google-chrome https://open-rmf.github.io/rmf-panel-js/
上記のコマンドでブラウザを起動するとRMF Panelのページが表示されます。(ブラウザでURLを指定しても構いません。)
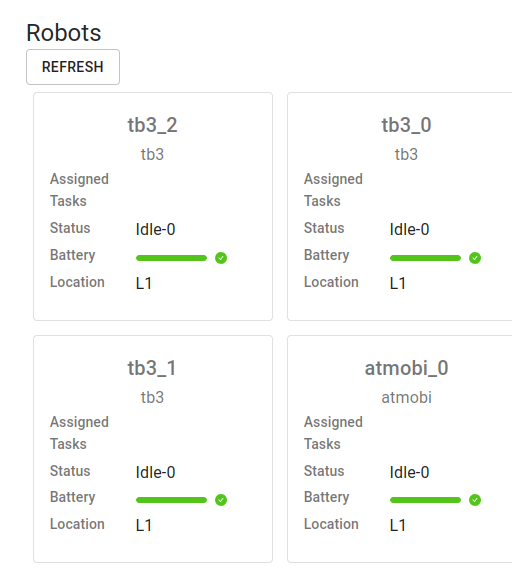
下の図にある「REFRESH」ボタンを押下すると、登録されているロボットが表示されます。
バッテリーは、強制的に100%にしているので満充電です。(前回の投稿参照)
ブラウザからタスクを実行します。
Dashbordを変更しているのでWayPointが設定したものになっています。
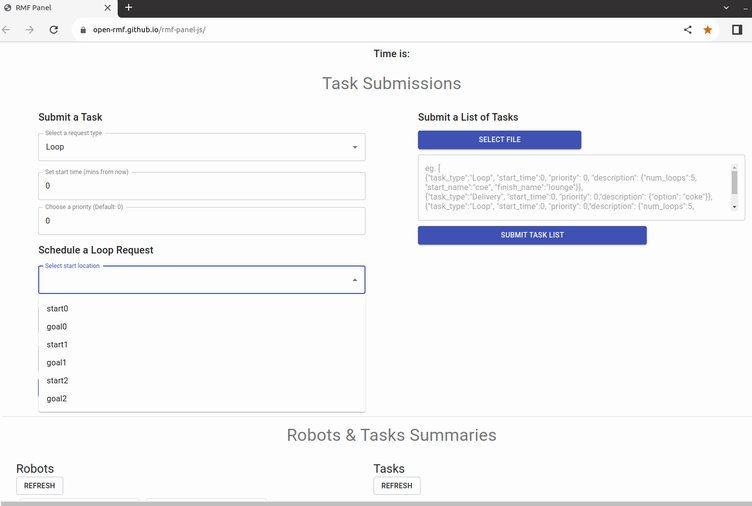
開始・終了地点をプルダウンメニューから選択して、「SUBMIT REQUEST」ボタンを押下するとタスクをOpen-RMFにリクエストします。
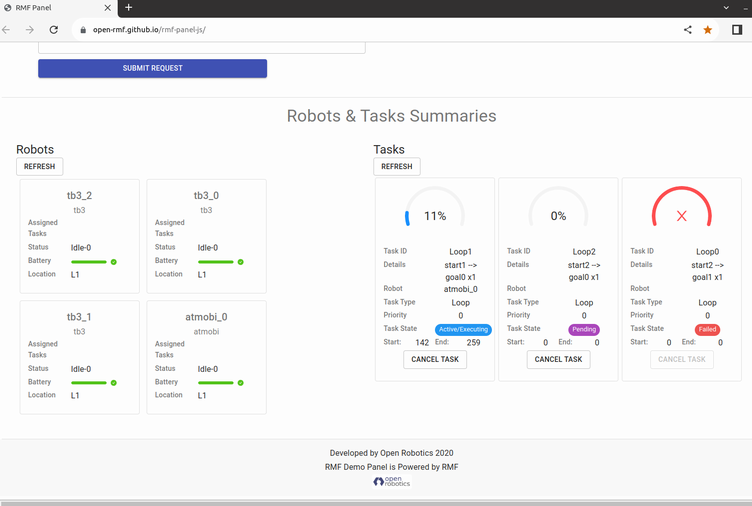
Tasksの「REFRESH」ボタンを押下するとタスク状態が表示されます。
しかし、下の図にあるようにタスク実行に失敗する時があり、今後解析していきます。
実行途中の様子です。
Worldに対して追加したAMRが大きかったのですが、なんとか通れました。

まとめ
ブラウザから複数のFleetを使ってタスク実行できることを確認しました。
ここからが調査の本番ですね。
Fleetの外部APIはトピックベースなので、ソース修正することなく簡単にロボットを追加できました。
ロボット側もmove_baseのAPI体系をサポートしていたら簡単に追加できます。
ROSを使うと混在環境でも、簡単に動かせるのが良いですね。
付録
Docker関連ファイルです。(Proxy環境になります。)
Melodic on Docker
Melodicは、ROSのOffical Imageを使いました。
Dockerを使うときは、Dockerfile、docker-compose.yaml、起動スクリプトの3セットを作ります。
そして、起動スクリプト(以下、run.sh)と同じフォルダーにあるcatkin_wsをDockerにマウントさせます。作った後はrun.shを実行するだけにしています。
編集はホストマシンで行い、ビルド・実行はrun.shしてDockerコンテナのbashで実行します。
Dockerコンテナの最初の起動は、catkin_wsフォルダーに移動して、以下のコマンドで不足パッケージをインストールすると思います。
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
しかし、Dockerのコンテナが消えると、もう一度パッケージをインストールする必要があります。
Localネットワーク環境でコンテナが消えてしまうと不足パッケージをインストールできないので困ります。
そこで、先に不足パッケージを調べてDockerのImageに入れてます。
こうすることで、コンテナが消えてもパッケージをインストールする必要はありません。
調べ方ですが、最初にシンプルなDocker Imageを作成して、Dockerのコンテナのbashからcatkin_wsフォルダーに移動して、
以下を実行すると不足パッケージが表示されます。
rosdep check --from-path src --ignore-src --rosdistro melodic
出てきたパッケージをDockerfileに追加して、run.shを実行します。
Dockerfile
# This is an auto generated Dockerfile for ros:ros-base
# generated from docker_images/create_ros_image.Dockerfile.em
FROM ros:melodic-ros-core-bionic
ENV http_proxy ${HTTP_PROXY}
ENV https_proxy ${HTTPS_PROXY}
ENV HTTP_PROXY ${HTTP_PROXY}
ENV HTTPS_PROXY ${HTTPS_PROXY}
ENV DEBIAN_FRONTEND=noninteractive
ENV DEBIAN_NOWARNINGS=yes
# install bootstrap tools
RUN apt-get -o Acquire::http::proxy=${http_proxy} update && apt-get -o Acquire::http::proxy=${http_proxy} install --no-install-recommends -y \
build-essential \
python-rosdep \
python-rosinstall \
python-vcstools \
python-pip \
&& rm -rf /var/lib/apt/lists/*
# bootstrap rosdep
RUN sudo -E rosdep init && \
rosdep update --rosdistro $ROS_DISTRO
# install ros packages
RUN apt-get -o Acquire::http::proxy=${http_proxy} update && apt-get -o Acquire::http::proxy=${http_proxy} install -y --no-install-recommends \
ros-melodic-ros-base=1.4.1-0* \
&& rm -rf /var/lib/apt/lists/*
RUN apt-get -o Acquire::http::proxy=${http_proxy} update && apt-get -o Acquire::http::proxy=${http_proxy} install -y --no-install-recommends \
python-catkin-tools \
#########################################################
# ここに、rosdep checkで確認したモジュールを追加する
#########################################################
vim
RUN echo "source /opt/ros/melodic/setup.bash" >> /root/.bashrc
docker-compose.yaml
IPアドレス(XXX.XXX.XXX.XXX)とポート番号(PPPP)は環境に応じて変更します。
使用しているPCのグラフィックスカードがGeForceではないのでCUDAの設定はしていません。
version: "2.4"
services:
Melodic:
runtime: runc
image: melodic_image_${USER}
tty: true # make container stay launched
container_name: melodic_${USER}
privileged: true
environment:
# Display X Server GUI.
- DISPLAY=${DISPLAY}
- QT_X11_NO_MITSHM=1
# Configure PROXY.
- HTTP_PROXY=http://XXX.XXX.XXX.XXX:PPPP
- HTTPS_PROXY=http://XXX.XXX.XXX.XXX:PPPP
build:
context: ./
dockerfile: ./Dockerfile
args:
- HTTP_PROXY=http://XXX.XXX.XXX.XXX:PPPP
- HTTPS_PROXY=http://XXX.XXX.XXX.XXX:PPPP
volumes:
# GUI
- /tmp/.X11-unix:/tmp/.X11-unix
# H/W
- /dev:/dev:rw
# work
- ./catkin_ws:/root/catkin_ws
network_mode: host
ports:
# 外部と通信するポートを記載
- "9090:9090"
- "PPPP:PPPP"
working_dir: /root/catkin_ws
起動スクリプトファイルです。
#!/bin/bash
xhost + local:root
docker-compose up -d
docker-compose exec Melodic bash