記事作成途中です.
目的
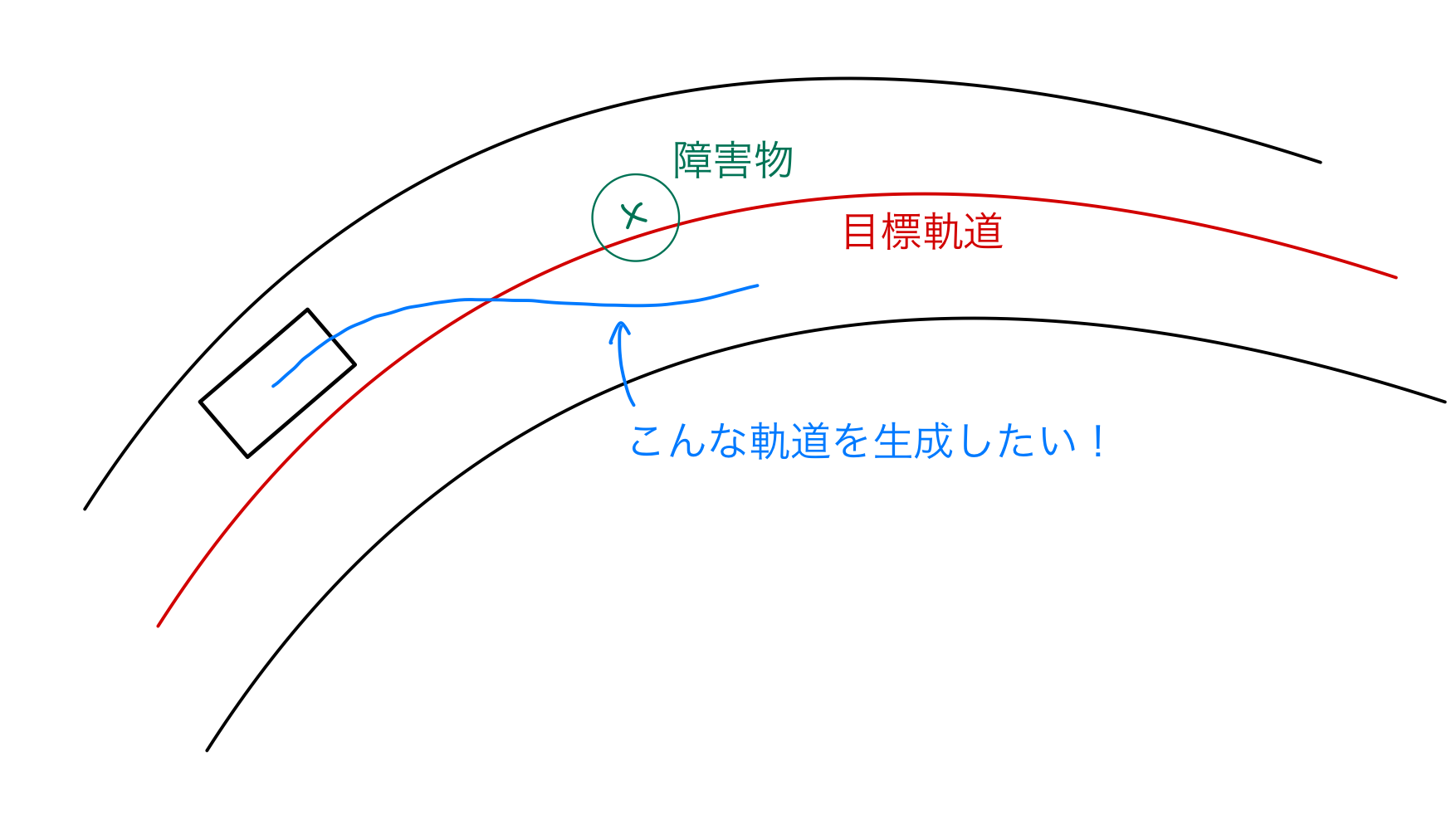
グローバルプランナーなどで与えられた目標trajectory(以降,center lineと呼ぶ)をもとに,障害物を避けるようなtrajectoryをいい感じに生成することを目的としています.イメージは以下の図のようなものです.
参考
この記事を書くにあたって以下の資料を参考にしました.
Frenet座標系について
このアルゴリズムを理解するために重要な概念であるFrenet座標系について説明します.Frenet座標系とは,一言で表すと「center lineに沿った座標系」です.
一般的に座標系は以下のような$(x,y)$座標を考えます.
 (fjp.github.ioより)
(fjp.github.ioより)
これに対してFrenet座標系は,center line(青線)を軸$s$とし,それに直交する線を軸$d$とする$(s,d)$座標を考えます.
 (fjp.github.ioより)
(fjp.github.ioより)
trajectoryを計画する際には,最初はFrenet座標系でtrajectoryを考えて,それを直交座標系に戻すというアプローチをとります.
アルゴリズムの概観
以下のアニメーションは,実際にプランニングをしている様子を示しています.青がcenter lineで,赤が障害物を回避するように最適化されたtrajectoryを表しています.
 (python roboticsより)
(python roboticsより)
これらアルゴリズムは,以下のような手順を踏みます.
-
center lineを求める
- このcenter lineは,Frenet座標系の$s$軸として用います.
-
Frenet座標系での最適化に用いる初期位置・速度・加速度を求める
- 最初にプランニングを行う場合は,現在の直交座標系での状態からFrenet座標系の状態に変換する必要があります.それ以外の場合では,前回計算したtrajectoryの次の点を用います.(このアルゴリズムはMPCではないので,毎ステップ,観測された現在の状態からFrenet座標系での状態に変換する必要はありません.)
-
横方向と縦方向のtrajectoryを計算する
- 基本的に横方向のtrajectory$d(t)$と縦方向$s(t)$を独立に求めます.(車速が低速の場合は,この記述は当てはまりません.ここで詳細を説明します)
- ここで求めるtrajectoryは,1つではなく,複数のtrajectoryを求めます.最終的に,これらのtrajectoryの中から,制約を満たした最も良いtrajectoryを選びます.
- これら複数のtrajectoryは,一つの初期条件(状態) と,$s$や$d$や時間間隔$T$が異なる複数の終端条件(状態) を満たす多項式として表されます.
- 以下が実際に生成されるFrenet座標系でのtrajectoryです.

-
縦方向と横方向のtrajectoryを合わせる
- ここは,特に難しいとこは無いのですが,$C_{\text {tot }}=$ $k_{\text {lat }} C_{\text {lat }}+k_{\text {lon }} C_{\text {lon }}$のように,横方向でのコスト$C_{\text {lat }}$と縦方向でのコスト$C_{\text {lon }}$に係数$k_{\text {lat }}, k_{\text {lon }}$を掛けて,トータルコスト$C_{\text {tot }}$を求めます.
-
直交座標系でのtrajectoryを求める
-
複数のtrajectoryの中から障害物に衝突せず,コスト$C_{\text {tot }}$が最も小さいtrajectoryを選択する
アルゴリズムの詳細(WIP)
center lineのプロパティ
center lineはFrenet座標系で求めた多項式で表されるtrajectoryから,直交座標系でのtrajectoryを求める必要があります.詳しくはFrenet座標系から直交座標系への変換に記述しますが,
- 最適化したtrajectoryとして,位置$\vec{x}$のみを求めたい場合,center lineはtrajectory上で進んだ距離$s$から,以下を求めることができる必要があります.
- center line上の点$\vec{r}(s)$
- center lineの傾き$\theta_{r}(s)$
- 最適化したtrajectoryとして,速度$v_x$や速度の向き$\theta_x$も求めたい場合,上記に加え,以下のものを求める必要があります.
- center lineの曲率$\kappa_{r}(s)$
- 最適化したtrajectoryとして,曲率$\kappa_x$や加速度$a_x$も求めたい場合,更に以下を求めることが出来る必要があります.
- center lineの曲率の変化率$\kappa_{r}'(s)$