SWD Starter Kitを使ってみた
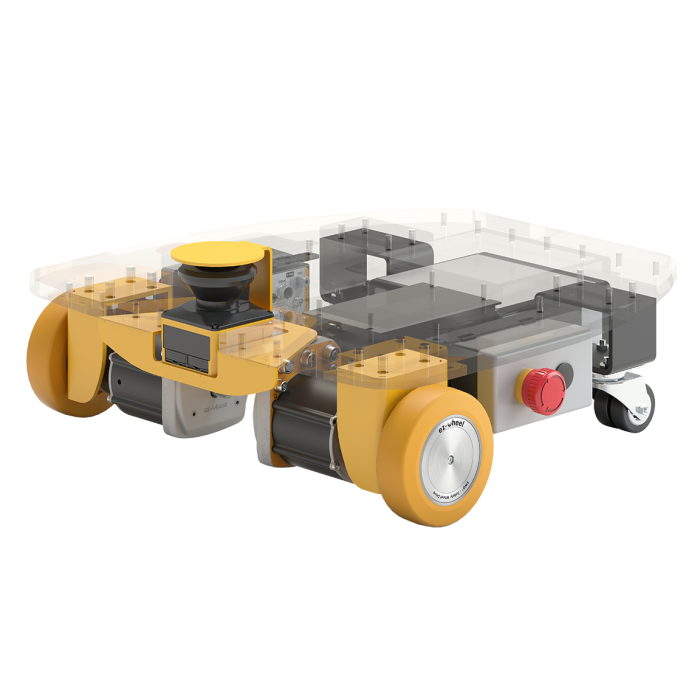
SWD Starter KitはezWheel社が開発しているAGV/AMR向けのギヤモーター、モータードライバーが一体化されている製品です。ROS用のドライバソフトも提供されています。
国内ではIDEC株式会社が販売しています。
「安全自律走行ホイール」という事で、セーフティレーザスキャナとセーフティドライブをセットにすることで、安全規格(ISO3691-4)に適合するAMR/AGVの開発をサポートします。
今回、お勉強用にSWD Starter Kitを購入し自律移動ができるように設定しました。幾つかトラブルポイントも有りましたので本投稿にまとめました。
配線の接続
今回購入したのは自律移動コントローラが付属していないモデル(EZSK-CORE.14/WOID)です。簡単なSLAMができる産業用PCがついたモデルもありますが、色々と試す目的で購入していますのでコントローラは別途選定しました。
産業用PC無しモデルの場合、セーフティレーザスキャナ(SE2L)と接続するためのEthernetケーブル、モータードライバと接続するためのCANケーブルが付属していないため下記のものを手配しました。
コントローラ用PCにはUSB-CAN変換アダプタを使用しました。
| 用途 | 品番 | URL |
|---|---|---|
| SE2L用イーサネットケーブル | SE9ZHS2XCD13 | https://www.monotaro.com/p/0951/4077/ |
| SE2L設定用 microUSB ケーブル | --- | --- |
| CANケーブル | 航空コネクタ M12 5ピン | https://www.amazon.co.jp/dp/B07JZLHMMJ |
| D-SUB9ピン ハウジング | --- | https://www.amazon.co.jp/dp/B07G4PK97N |
| CAN-USBインタフェース | PCAN-USB IPEH-002021 | https://www.gailogic.co.jp/ae/can_pcif/pcan_usb |
CAN-USBインタフェースはinnomakerのUSB2CAN-Cでも動作しましたが、コントローラPCを再起動したとき再接続できない事がたまにあるみたいです。業務などで使用する場合はPCAN-USB等のちゃんとした物を使用したほうが良さそうです。
CANケーブルの加工
購入した航空コネクタはM12コネクタの反対側はバラ線になっているのでD-SUB9ピンのコネクタを取り付けます。
M12コネクタとPCAN-USBのD-SUB9のピン配置は下記の様になっています。(USB2CAN-Cのピン配置も同じでした。)


D-SUB9コネクタハウジング内で、CAN_HとCAN_Lの間に終端抵抗120Ωを取り付けています。

コントローラPCの設定
ez-WheelをROSから制御するためのドライバはgithubで公開されています。ROS 2(Foxy or Galactic)/ROS(noetic)に対応していますが、今回はnoeticで動かしました。
https://github.com/ezWheelSAS/
*リンク先が変更になりました。
https://github.com/IDEC-ezWheel/
ROS noeticのインストール
コントローラ用PCにubuntu 20.04をインストールした後、こちらを参考にnoeticのインストールします。
ユーザ名は swd_sk とします。ユーザ名はSWDドライバサービスを起動する時に指定されるため、これ以外のユーザ名で起動すると上手く動作しません。ユーザ名をswd_sk以外に設定した場合、systemdの設定ファイル(/etc/systemd/system/ezw-*)に記載されている実行ユーザ名を変更します。
CAN-IFの設定
USBポートにCAN-IFを接続した状態で行わないとエラーになります。
ドライバをインストール。
$ sudo -E apt update
$ sudo -E apt-get install can-utils
$ sudo modprobe can
$ sudo modprobe can_raw
IFの設定
$ sudo ip link set can0 type can bitrate 1000000
$ sudo ip link set up can0
疎通確認
SWD Starter Kitと接続し
$ candump can0 | grep 7F
と打って、データが流れてきたらOKです。
セーフティレーザスキャナ(SE2L)の設定
設定方法はこちらのドキュメントに記載されています。
SE2LのIPアドレス設定、保護エリア設定はSLS Project Designerを起動し、取得した設定ファイル StarterKit_IDEC.hucx を読み込んでSE2Lに書き込みます。
SE2LとSLS Project Designerを使うWindowsPCは、SE2Lのフロントカーバを外したところにあるmicroUSBコネクタを使って接続します。
書き込みステップの1つ前の確認画面にて、複数のタブの内容を全て表示して確認しないと、書き込みボタンがEnableになりません。
SWDドライバのインストール
githubのREADME記載に従ってドライバのインストールを行います。
リポジトリ設定とパッケージのインストール
$ echo "deb http://packages.ez-wheel.com:8081/apt-repo focal main" | sudo tee /etc/apt/sources.list.d/ez-wheel.list
$ wget -qO - http://packages.ez-wheel.com:8081/archive.key | sudo apt-key add –
$ sudo -E apt update && sudo -E apt install swd-services ros-noetic-swd-ros-controllers swd-system-config-2wheels
環境変数の設定
ライブラリパスの設定
$ echo 'export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/opt/ezw/usr/lib' >> ~/.bashrc
DBUSの設定
$ echo 'export $(cat /tmp/SYSTEMCTL_dbus.id)' >> ~/.bashrc
動作の確認
再起動後、swd_diff_drive_controllerノードを起動してみます。
$ roslaunch swd_ros_controllers swd_diff_drive_controller.launch
/swd_diff_drive_controller/cmd_velにTwistコマンドを送信し、モーターが回転することを確認します。もし回転しない場合、dbus-launchコマンド実行結果と、環境変数に設定されている値が同じか確認してください。
SLAMをしてみる
swd_starter_kit_bringupリポジトリに、hector-slamで環境地図を作成するためのlaunchファイルが登録されています。
パッケージの取得とビルド
$ sudo -E apt install git ros-noetic-urg-node ros-noetic-teleop-twist-joy \
ros-noetic-hector-mapping ros-noetic-rosbridge-server ros-noetic-tf2-web-republisher \
--no-install-recommends
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ git clone https://github.com/ezWheelSAS/swd_starter_kit_bringup.git
$ git clone https://github.com/ezWheelSAS/swd_robot_manager.git
$ cd ~/catkin_ws
$ catkin build
ゲームパッドのパラメータ変更
今回は台車をリモートから操作するためのエレコムのゲームパッドを使用しました。
swd_starter_kit_bringupに含まれる設定では xbox のコントローラを使うように設定されているので次の様の変更します。
<node pkg="teleop_twist_joy" name="teleop_twist_joy"
type="teleop_node">
<param name="joy_config" value="$(arg joy_config)" />
※ <param name="enable_button" value="4" />
※ <param name="enable_turbo_button" value="5" />
<param name="axis_linear" value="1" />
※ <param name="axis_angular" value="0" />
※ <param name="scale_linear" value="0.4" />
※ <param name="scale_angular" value="0.4" />
<param name="scale_linear_turbo" value="1.0" />
<param name="scale_angular_turbo" value="0.8" />
<remap from="/cmd_vel" to="/swd_diff_drive_controller/cmd_vel" />
</node>
scale_linearとscale_angularはデフォルト設定だとSWDの速度制限に引っかかるので遅めに変更しました。
制限値はswd_diff_drive_controllersのlaunchファイルの設定で変更できます。
メーカーの資料によると、ギヤの減速比が14:1で、モーターの回転リミットは1800rpm、減速後のホイール回転で130rpmです。starter kitのデフォルト設定はホイール回転制限75rpm、ホイールは直径125mmなので速度は約0.49m/secとなります。
SLAM実行
$ cd ~/catkin_ws
$ source devel/setup.bash
$ roslaunch swd_starter_kit_bringup starter_kit.launch
ゲームコントローラで台車を移動させると地図が作成できます。会社のオフィス内を一周回った時の地図をrvizで表示すると下記のような地図が確認できました。

おわりに
SWD Starter Kitを立ち上げるために必要なケーブルと、コントローラPC設定方法についてまとめました。作業時間1日ぐらいで、SLAMで地図を作成するところまでできました。
今回は地図を作成するところまでですが、次回はナビゲーション用ソフトを載せて自律移動させてみます。