点群処理の検証めんどくさい
相変わらずROSで点群処理をモリモリ書いています。
PointCloudの処理の検証って、ちょっとだけ動かして検証してみようかなーって時に面倒なんですよね。
LIDAR繋げるのめんどくさいし、ROSBAGで保存してもバリエーション足りなかったら追加で録らないとだし。
だったら自分でダミーの点群作ってPublishしてしまへと言うことで。
まぁ、自分が使いやすい用に適当に用意するよね
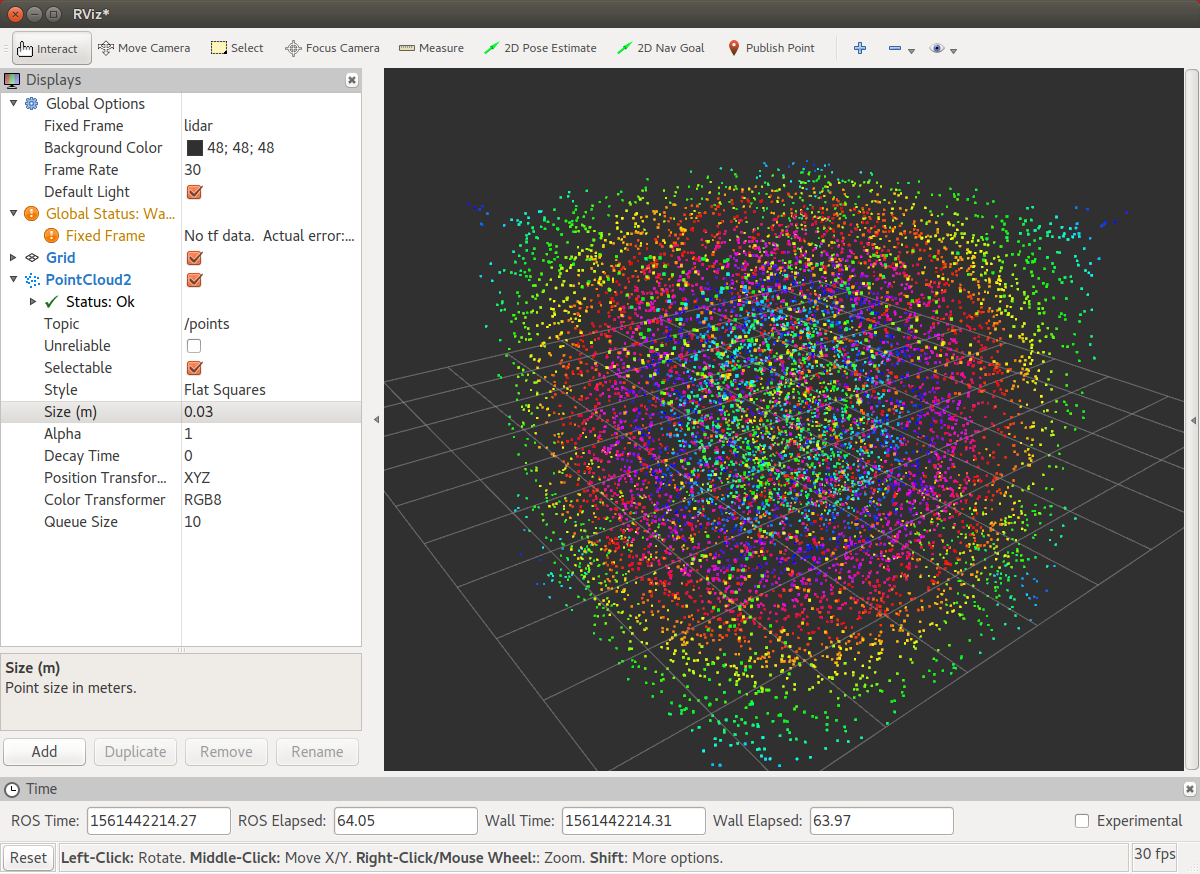
今回は、原点からXYZそれぞれ3mの範囲内にランダムな点を10000個ほど用意して、原点からの距離を元に色を変えた物を出力する事に。
色の変化は3mで色相環を一周するような感じ。
このコードをベースに格子状の点に書き換えたり、XYZRGBじゃなくてXYZIにしたりとか、色々カスタムして使ってます。
サンプル探してもHeaderのFrameIDとかTimestampが設定してなかったり、かゆい所に手が届いてなかったんだよなぁ。
ともかくコード
# include <ros/ros.h>
# include <pcl_ros/point_cloud.h>
// HSV -> RGB変換
void hsv2rgb(float h, float s, float v, int &_r, int &_g, int &_b) {
float r = static_cast<float>(v);
float g = static_cast<float>(v);
float b = static_cast<float>(v);
if (s > 0.0f) {
h *= 6.0f;
const int i = (int) h;
const float f = h - (float) i;
switch (i) {
default:
case 0:
g *= 1 - s * (1 - f);
b *= 1 - s;
break;
case 1:
r *= 1 - s * f;
b *= 1 - s;
break;
case 2:
r *= 1 - s;
b *= 1 - s * (1 - f);
break;
case 3:
r *= 1 - s;
g *= 1 - s * f;
break;
case 4:
r *= 1 - s * (1 - f);
g *= 1 - s;
break;
case 5:
g *= 1 - s;
b *= 1 - s * f;
break;
}
}
_r = static_cast<int>(r * 255);
_g = static_cast<int>(g * 255);
_b = static_cast<int>(b * 255);
}
int main(int argc, char **argv) {
ros::init(argc, argv, "dummy_point_publisher");
ros::NodeHandle nh, pnh("~");
ros::Rate rate(1.0);
std::string topic_name = "points";
float range = 3.0;
int number_of_points = 10000;
// pcl:PointCloud型のPublisher
// 実際にTopicとして流れるのは sensor_msgs::PointCloud2 になる
// テンプレートの中身を変えればXYZIとかXYZとかに変更可能
ros::Publisher pc_pub = nh.advertise<pcl::PointCloud<pcl::PointXYZRGB> >(topic_name.c_str(),10);
while (ros::ok()) {
// ダミー点群の準備
pcl::PointCloud<pcl::PointXYZRGB> dummy_cloud;
for (int i = 0; i < number_of_points; i++) {
pcl::PointXYZRGB new_point;
new_point.x = range - (rand() * range * 2) / RAND_MAX;
new_point.y = range - (rand() * range * 2) / RAND_MAX;
new_point.z = range - (rand() * range * 2) / RAND_MAX;
float distance = std::sqrt(new_point.x * new_point.x + new_point.y * new_point.y + new_point.z * new_point.z);
int r, g, b;
hsv2rgb(std::fmod(distance / 3.0, 1.0), 1.0, 1.0, r, g, b);
new_point.r = r;
new_point.g = g;
new_point.b = b;
// pcl::PointCloudはpush_backで足せば良いだけなので楽ちん
dummy_cloud.points.push_back(new_point);
}
auto msg = dummy_cloud.makeShared();
// ヘッダ情報はココでつめる
msg->header.frame_id = "lidar";
pcl_conversions::toPCL(ros::Time::now(), msg->header.stamp);
pc_pub.publish(msg);
rate.sleep();
}
return 0;
}
RVizで表示してみた